
一种外骨骼式五指弧位移手指康复训练系统.pdf

一吃****新冬

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种外骨骼式五指弧位移手指康复训练系统.pdf
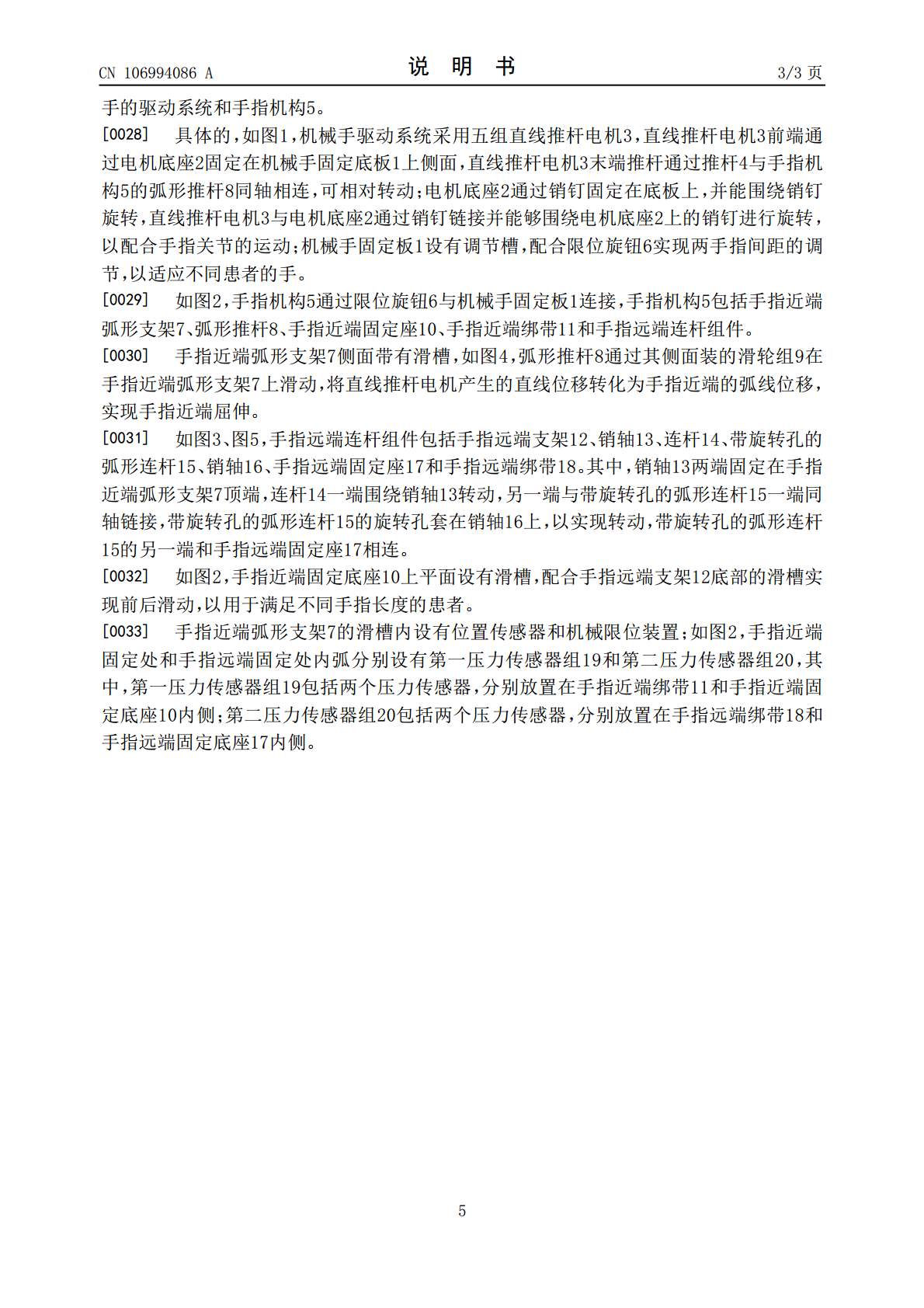
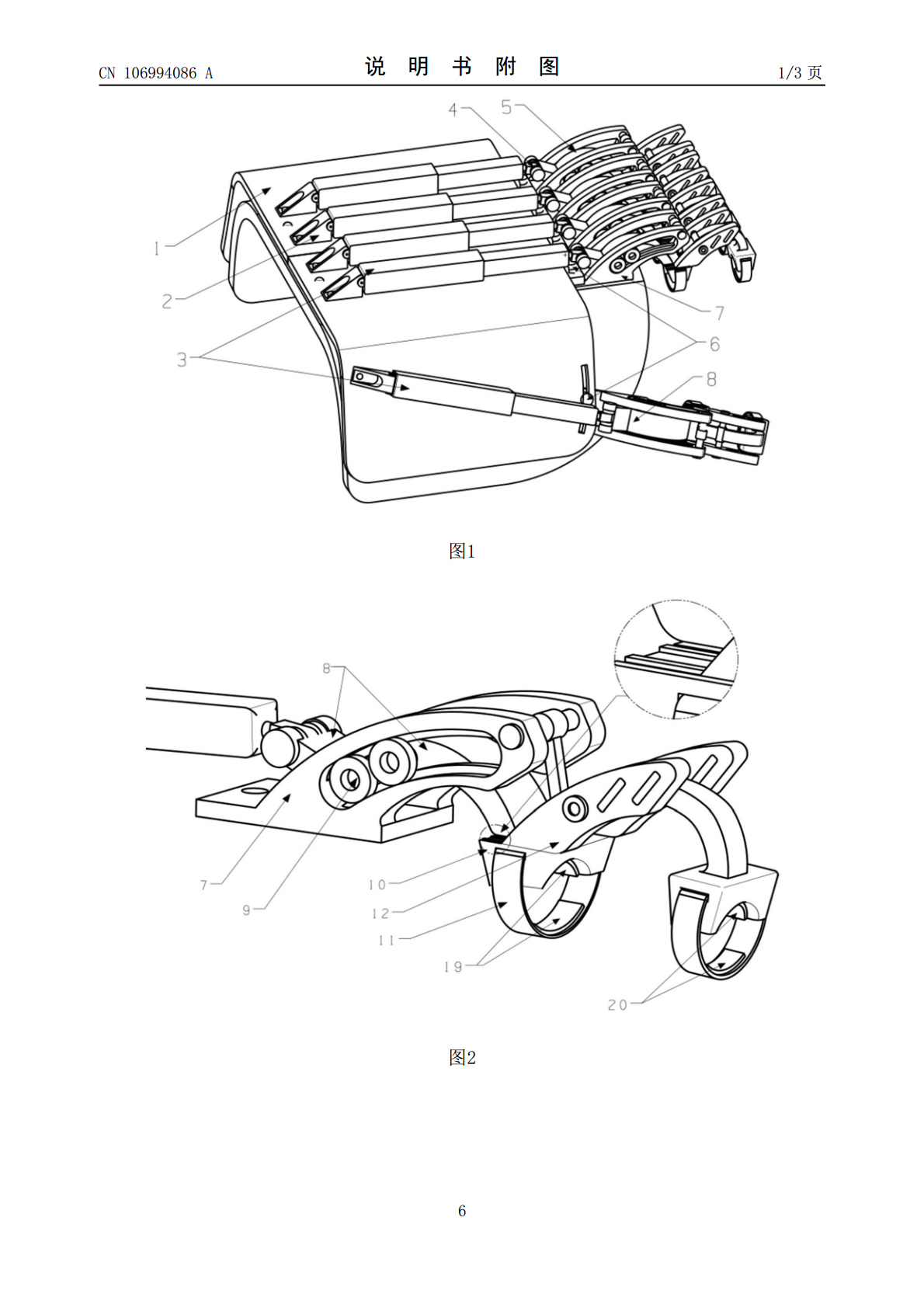
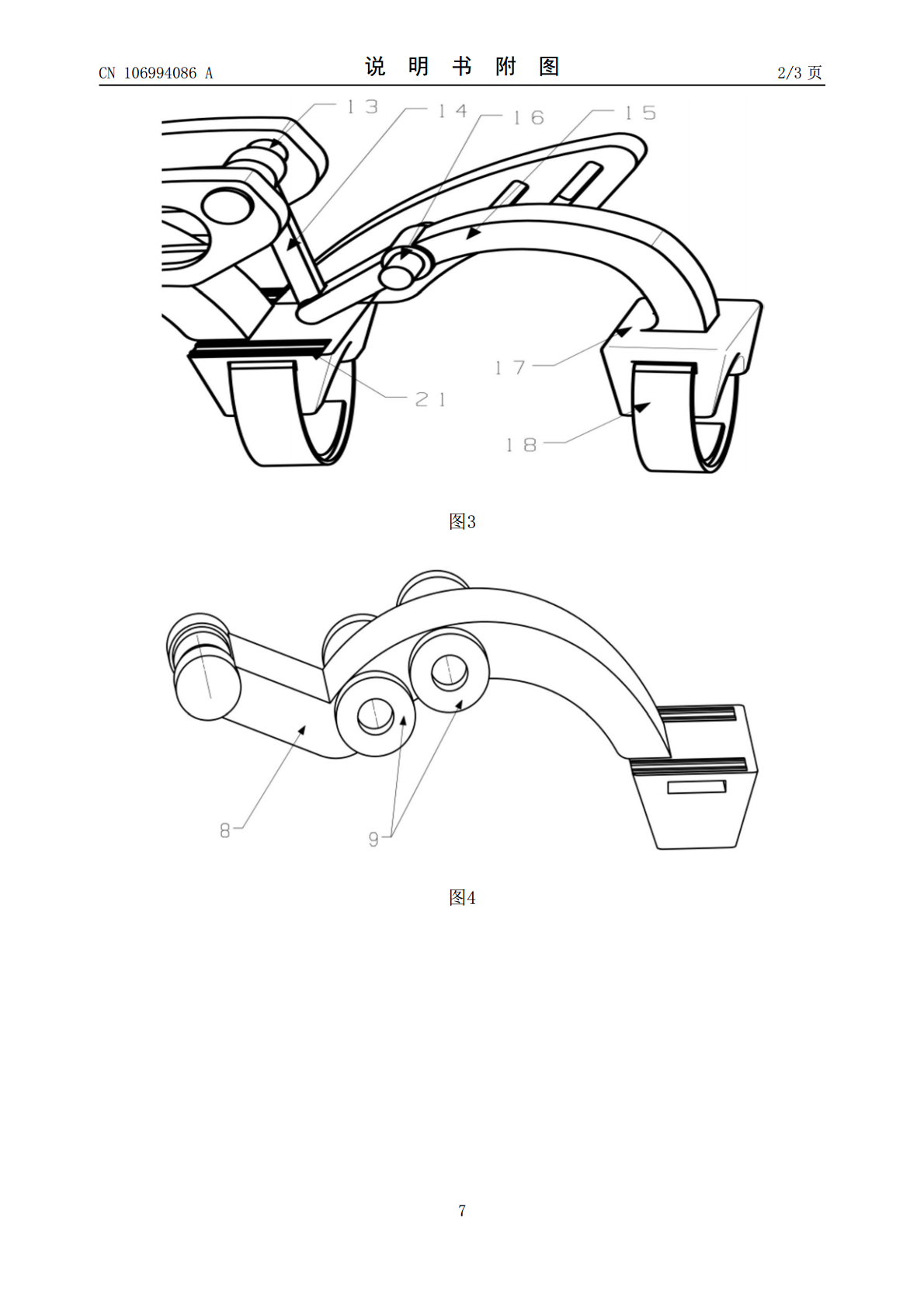
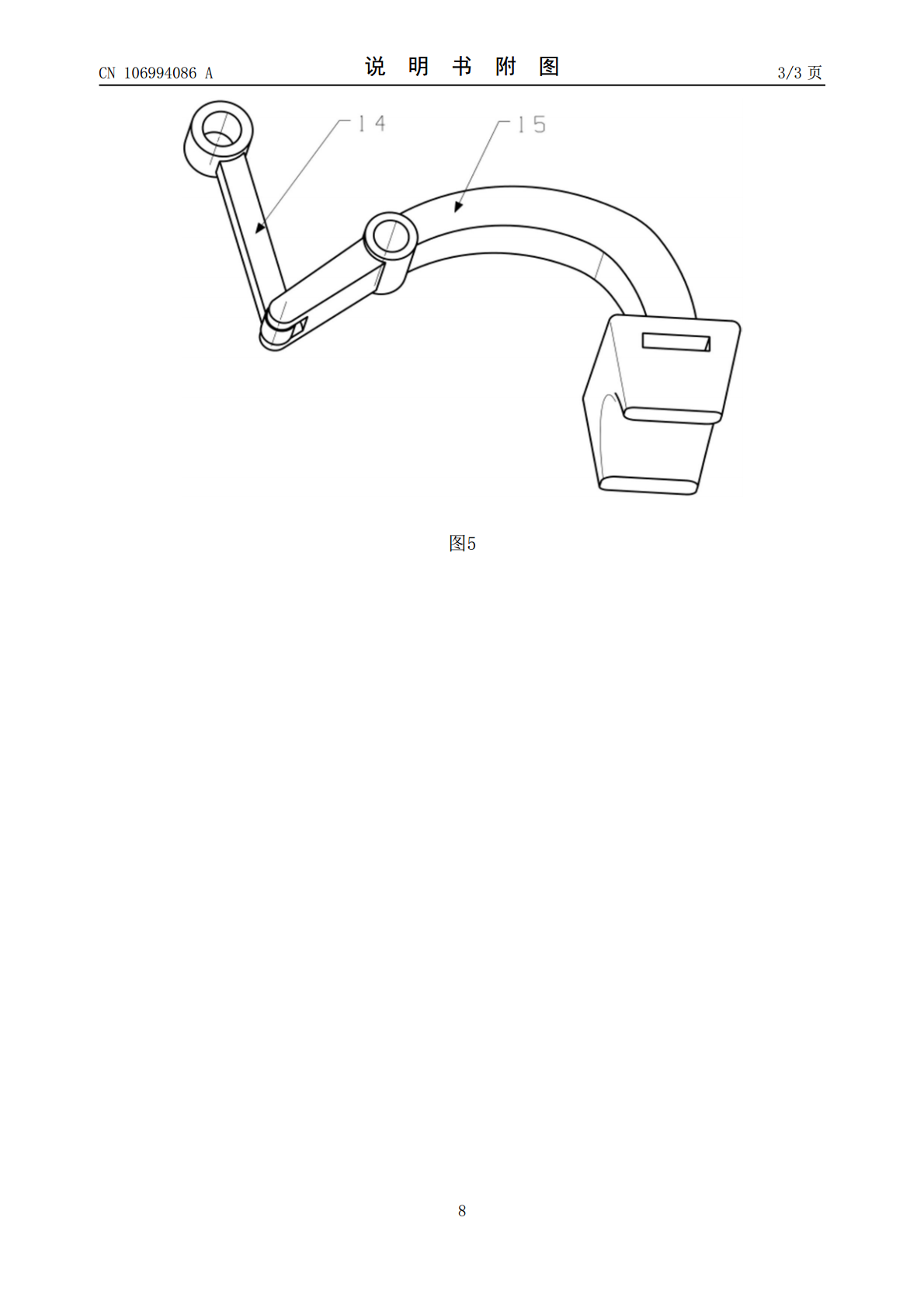
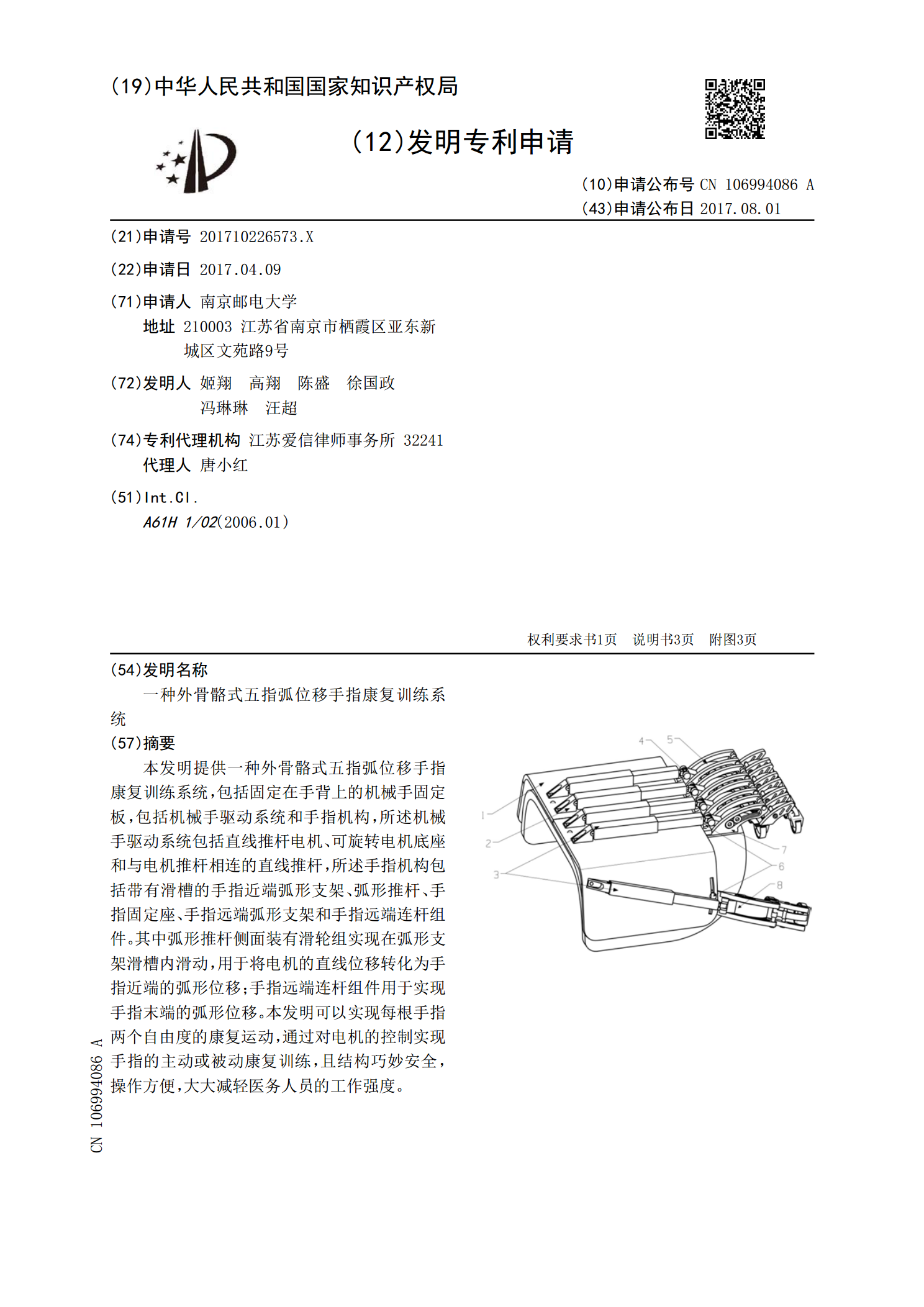
本发明提供一种外骨骼式五指弧位移手指康复训练系统,包括固定在手背上的机械手固定板,包括机械手驱动系统和手指机构,所述机械手驱动系统包括直线推杆电机、可旋转电机底座和与电机推杆相连的直线推杆,所述手指机构包括带有滑槽的手指近端弧形支架、弧形推杆、手指固定座、手指远端弧形支架和手指远端连杆组件。其中弧形推杆侧面装有滑轮组实现在弧形支架滑槽内滑动,用于将电机的直线位移转化为手指近端的弧形位移;手指远端连杆组件用于实现手指末端的弧形位移。本发明可以实现每根手指两个自由度的康复运动,通过对电机的控制实现手指的主动或

一种穿戴式手指康复训练外骨骼.pdf
本发明公开了一种穿戴式手指康复训练外骨骼,包括了支撑架、驱动器、第一连杆、第二连杆、第三连杆、第一指骨支撑件、第二指骨支撑件;所诉支撑架、所述驱动器和所诉第一连杆组成第一个三角形结构,所诉第一连杆、所述第二连杆和近指节组成第二个三角形结构,所述第二连杆、所诉第三连杆和中指节组成第三个三角形结构。本发明可以带动手指进行周期性的弯曲训练,结构性好,外观简洁,成本较低,体积较小,适合在家庭或者社区中推广,能供满足不同使用者的要求。
一种用于康复训练的外骨骼机械手指.pdf
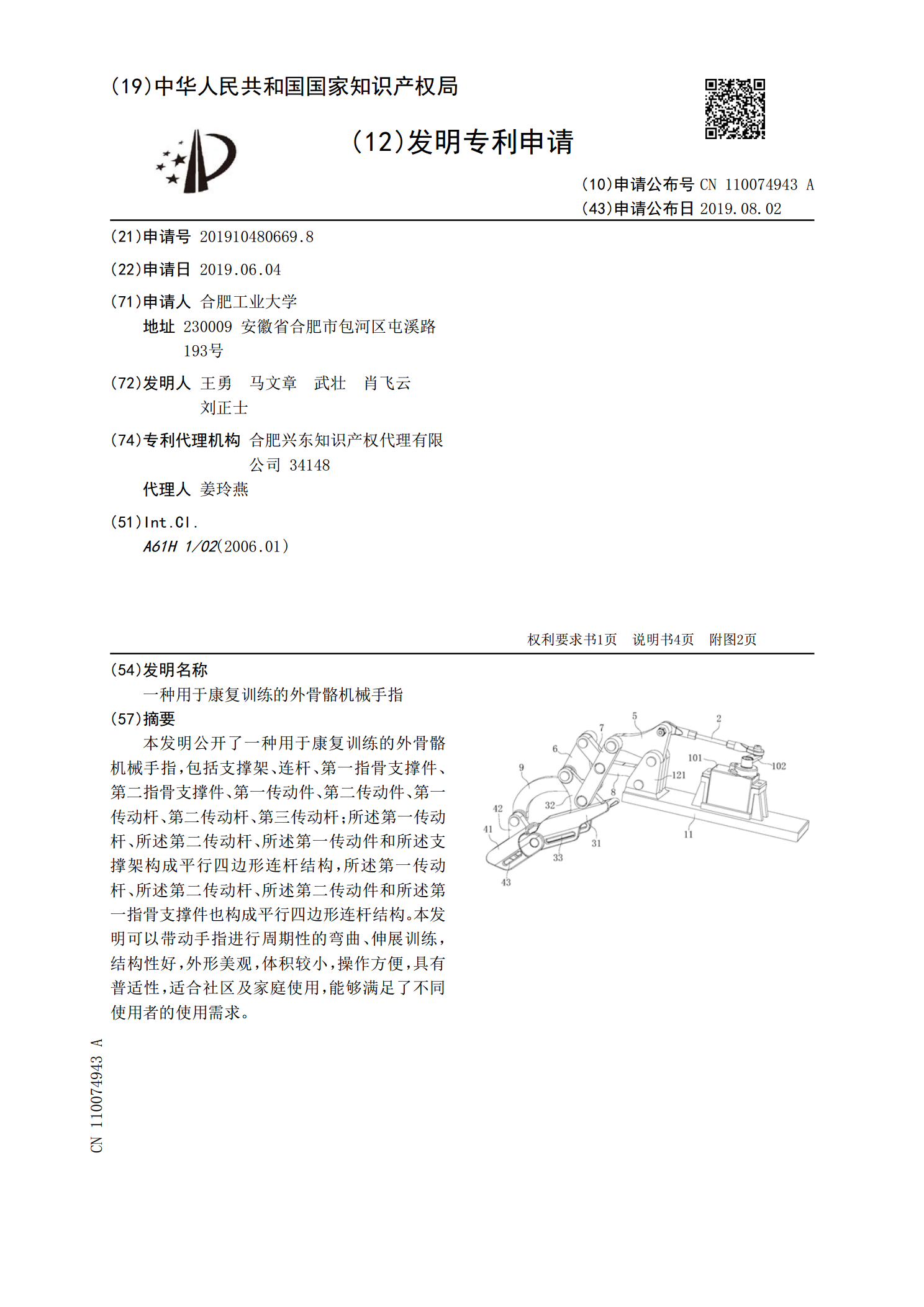
本发明公开了一种用于康复训练的外骨骼机械手指,包括支撑架、连杆、第一指骨支撑件、第二指骨支撑件、第一传动件、第二传动件、第一传动杆、第二传动杆、第三传动杆;所述第一传动杆、所述第二传动杆、所述第一传动件和所述支撑架构成平行四边形连杆结构,所述第一传动杆、所述第二传动杆、所述第二传动件和所述第一指骨支撑件也构成平行四边形连杆结构。本发明可以带动手指进行周期性的弯曲、伸展训练,结构性好,外形美观,体积较小,操作方便,具有普适性,适合社区及家庭使用,能够满足了不同使用者的使用需求。

主/被动驱动器联合驱动的外骨骼式手指康复训练装置.pdf
本发明公开了一种主/被动驱动器联合驱动的外骨骼式手指康复训练装置,包括力反馈驱动器以及手指外骨骼机构,力反馈驱动器包括壳体、电机以及磁流变液阻尼器,在电机和磁流变液阻尼器之间通过联轴器连接有一转动轮,在该转动轮上缠绕有一牵引绳;手指外骨骼机构包括支架、直线导轨以及手指固定结构,在直线导轨上设置有滑块,该滑块与牵引绳连接;在滑块上固定有一第一连接块,在第一连接块的下端转动连接有一L型的曲柄,曲柄的另一端转动连接有一中指节块,该中指节块另一端通过一第二连接块连接在手指固定结构上。本发明手指外骨骼结构采用了类似
一种儿童种外骨骼式康复训练装置.pdf
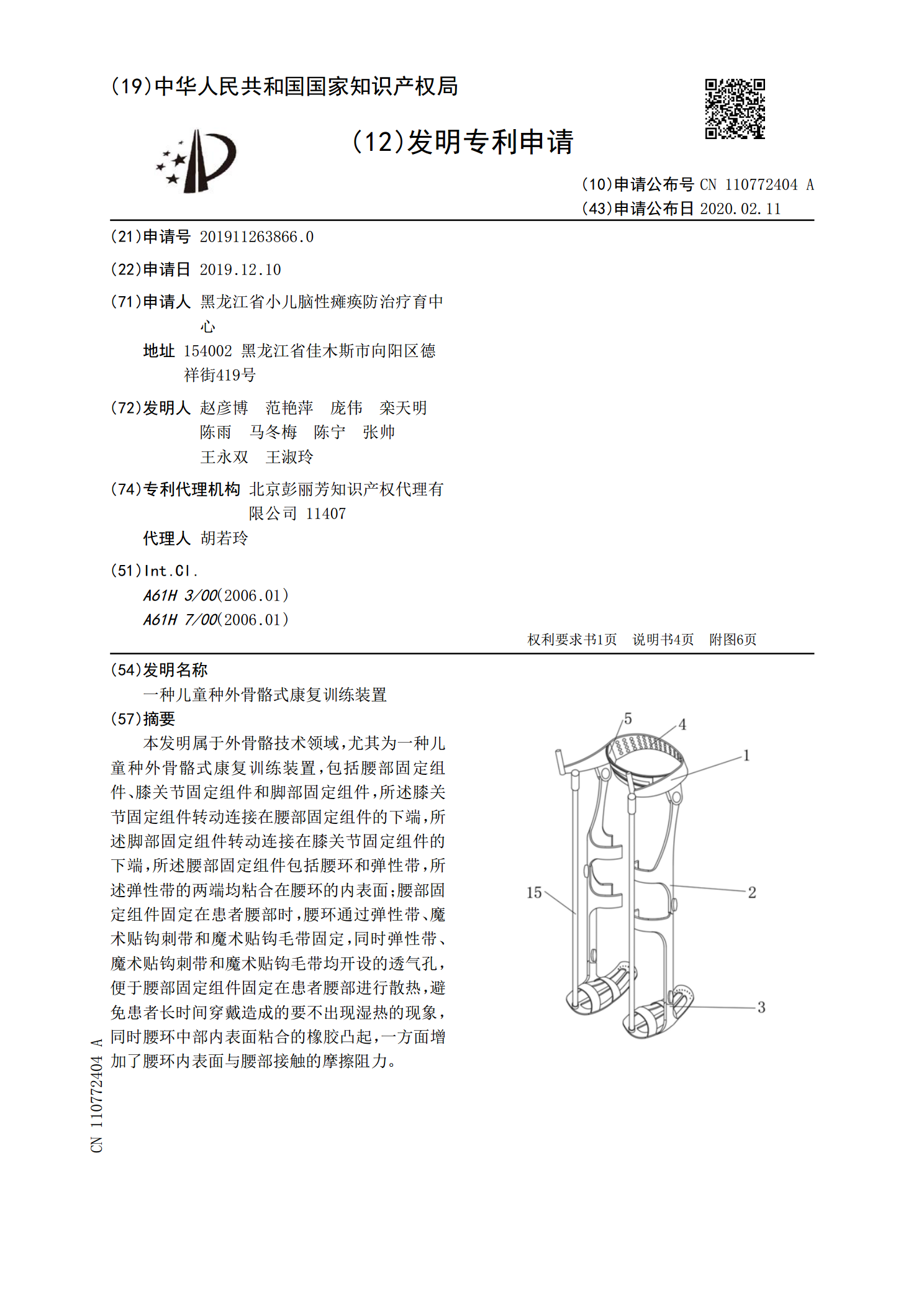
本发明属于外骨骼技术领域,尤其为一种儿童种外骨骼式康复训练装置,包括腰部固定组件、膝关节固定组件和脚部固定组件,所述膝关节固定组件转动连接在腰部固定组件的下端,所述脚部固定组件转动连接在膝关节固定组件的下端,所述腰部固定组件包括腰环和弹性带,所述弹性带的两端均粘合在腰环的内表面;腰部固定组件固定在患者腰部时,腰环通过弹性带、魔术贴钩刺带和魔术贴钩毛带固定,同时弹性带、魔术贴钩刺带和魔术贴钩毛带均开设的透气孔,便于腰部固定组件固定在患者腰部进行散热,避免患者长时间穿戴造成的要不出现湿热的现象,同时腰环中部内