
一种轮履串联式管道机器人.pdf

一吃****永贺

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮履串联式管道机器人.pdf
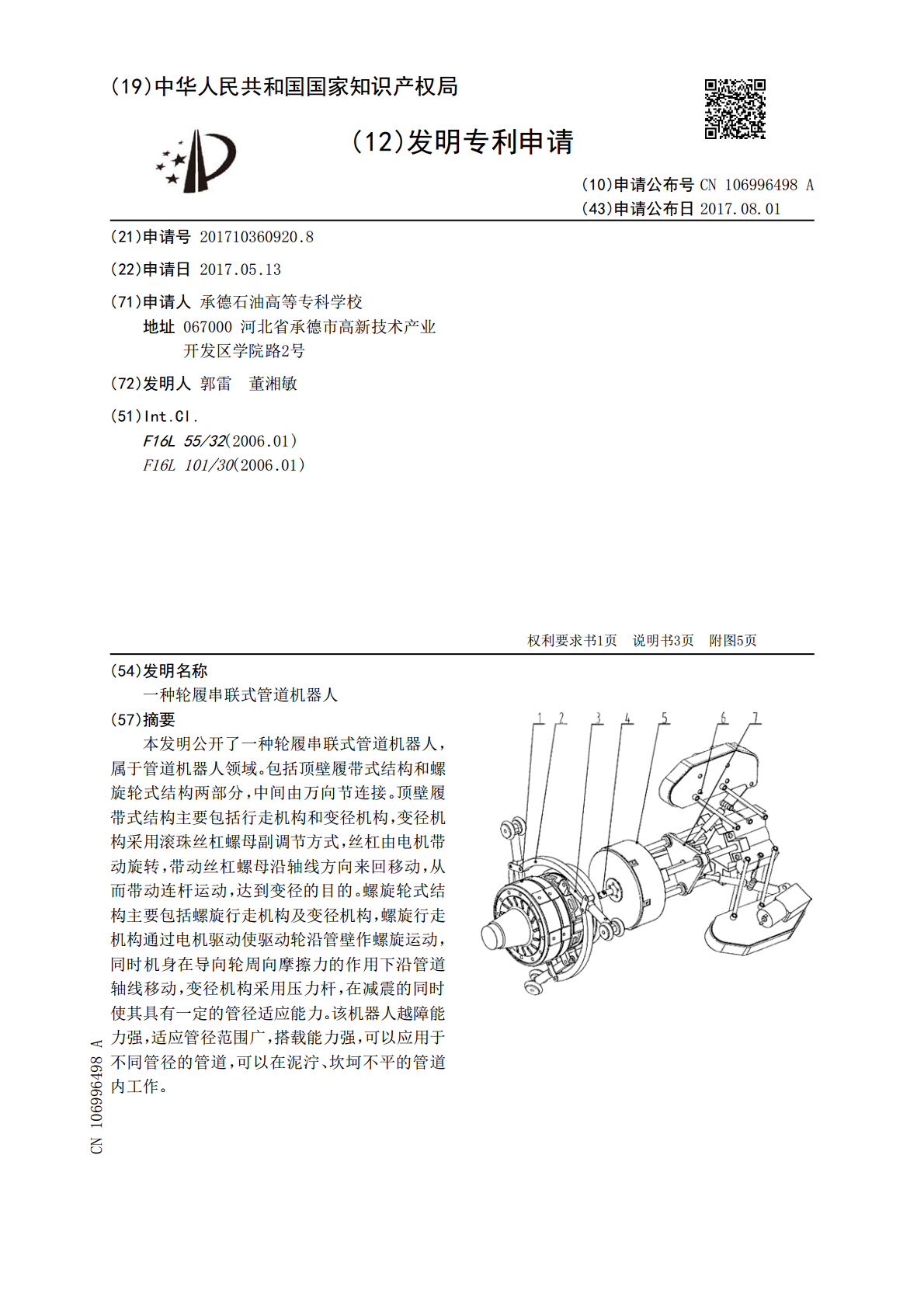
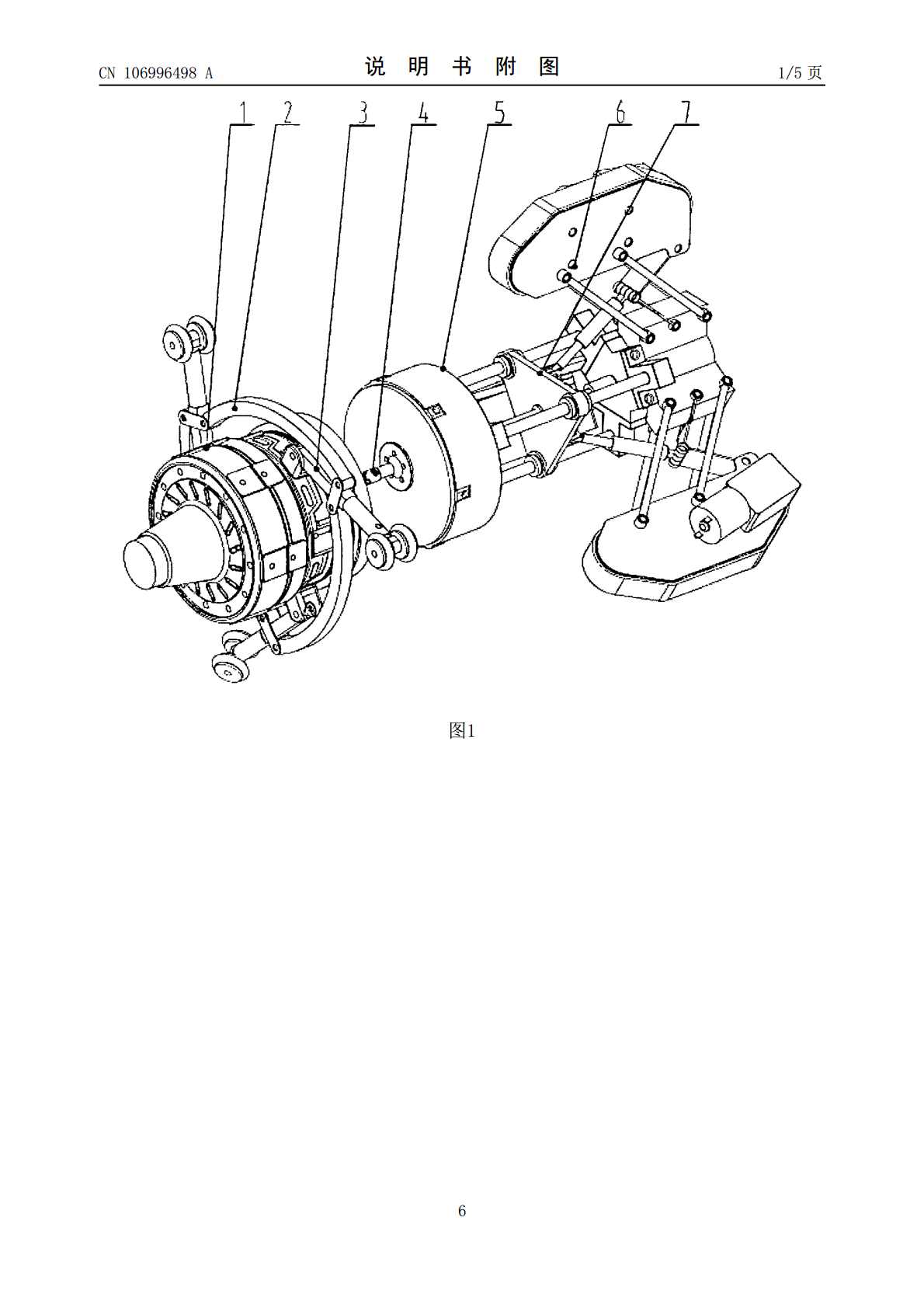
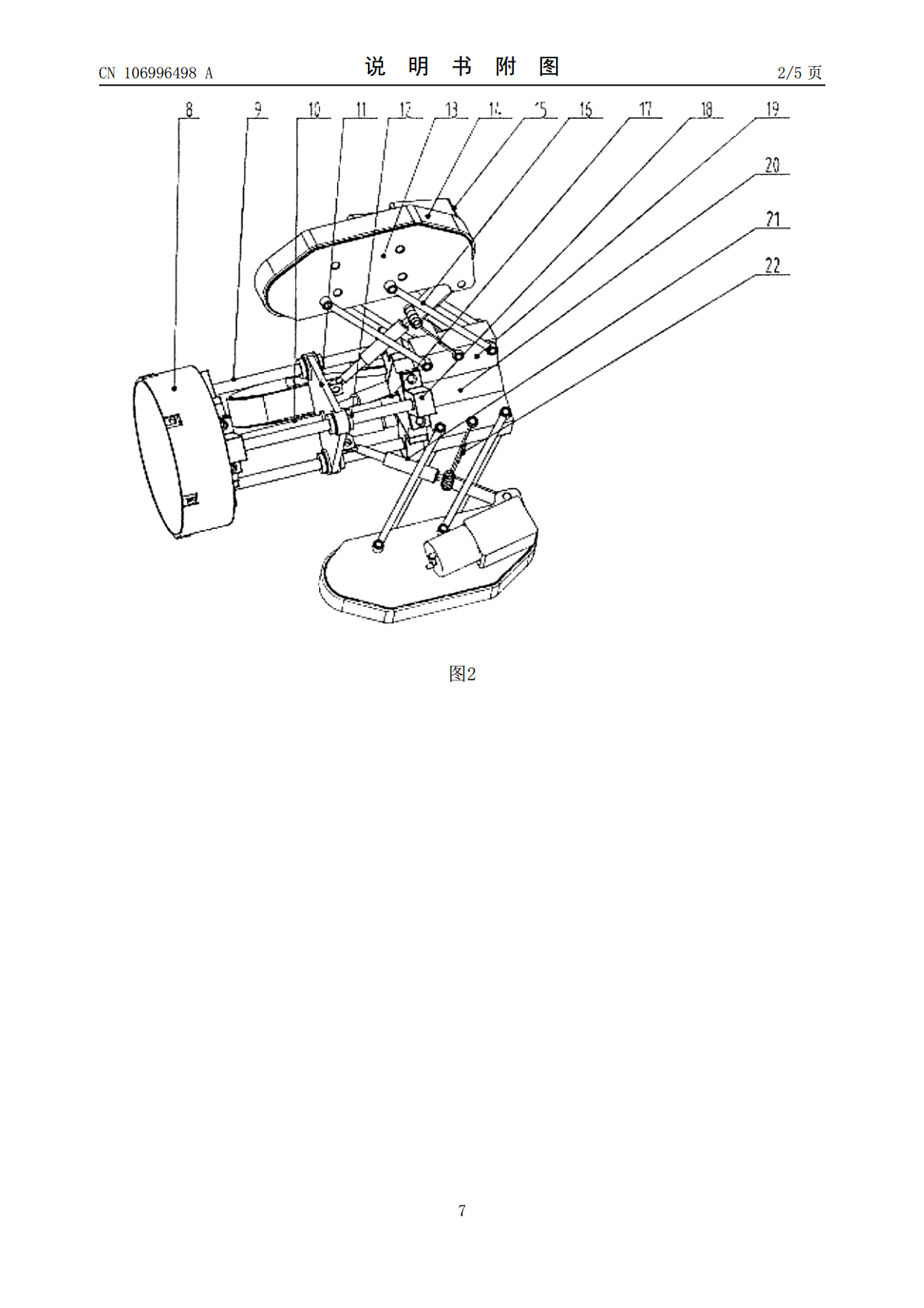
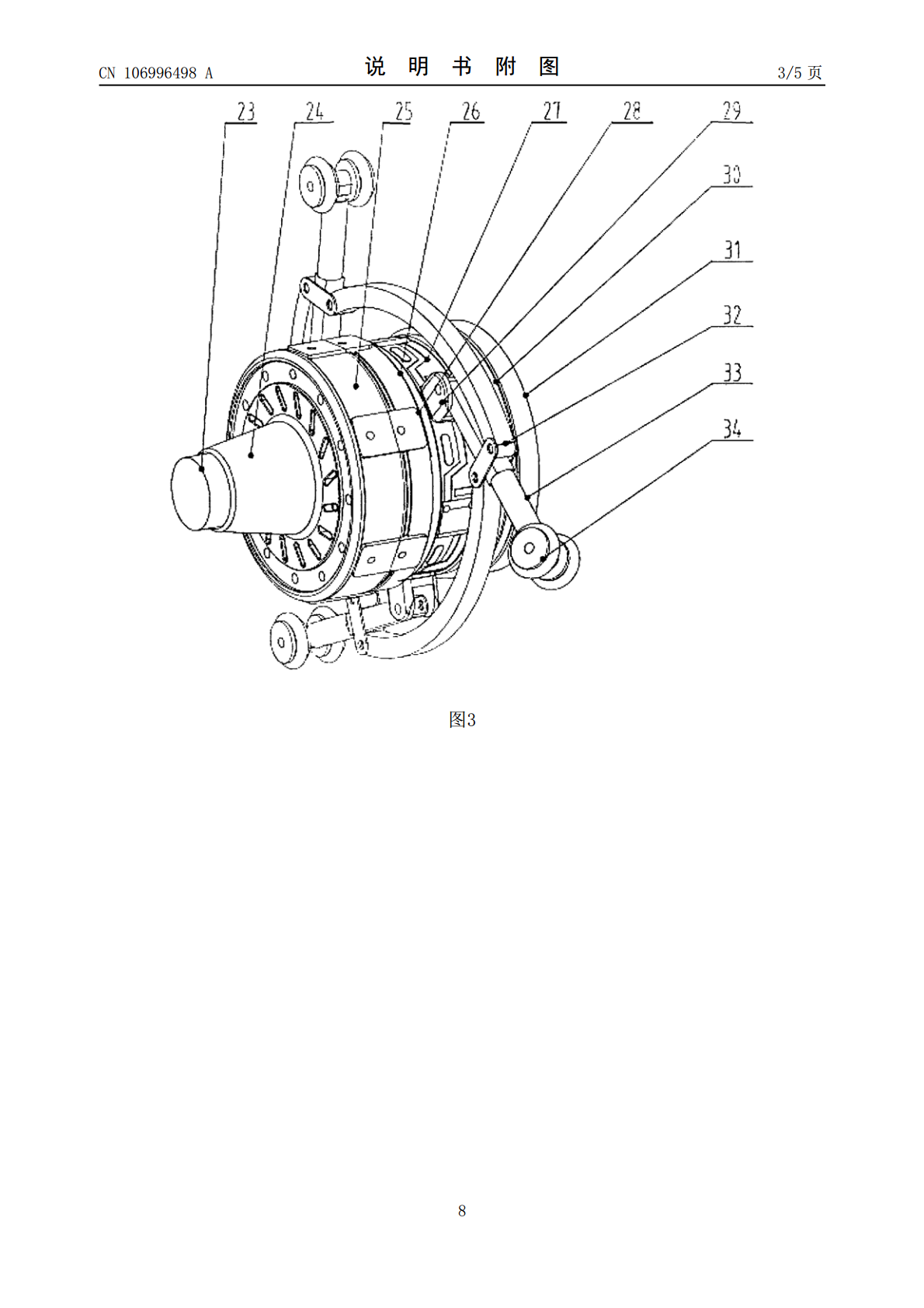
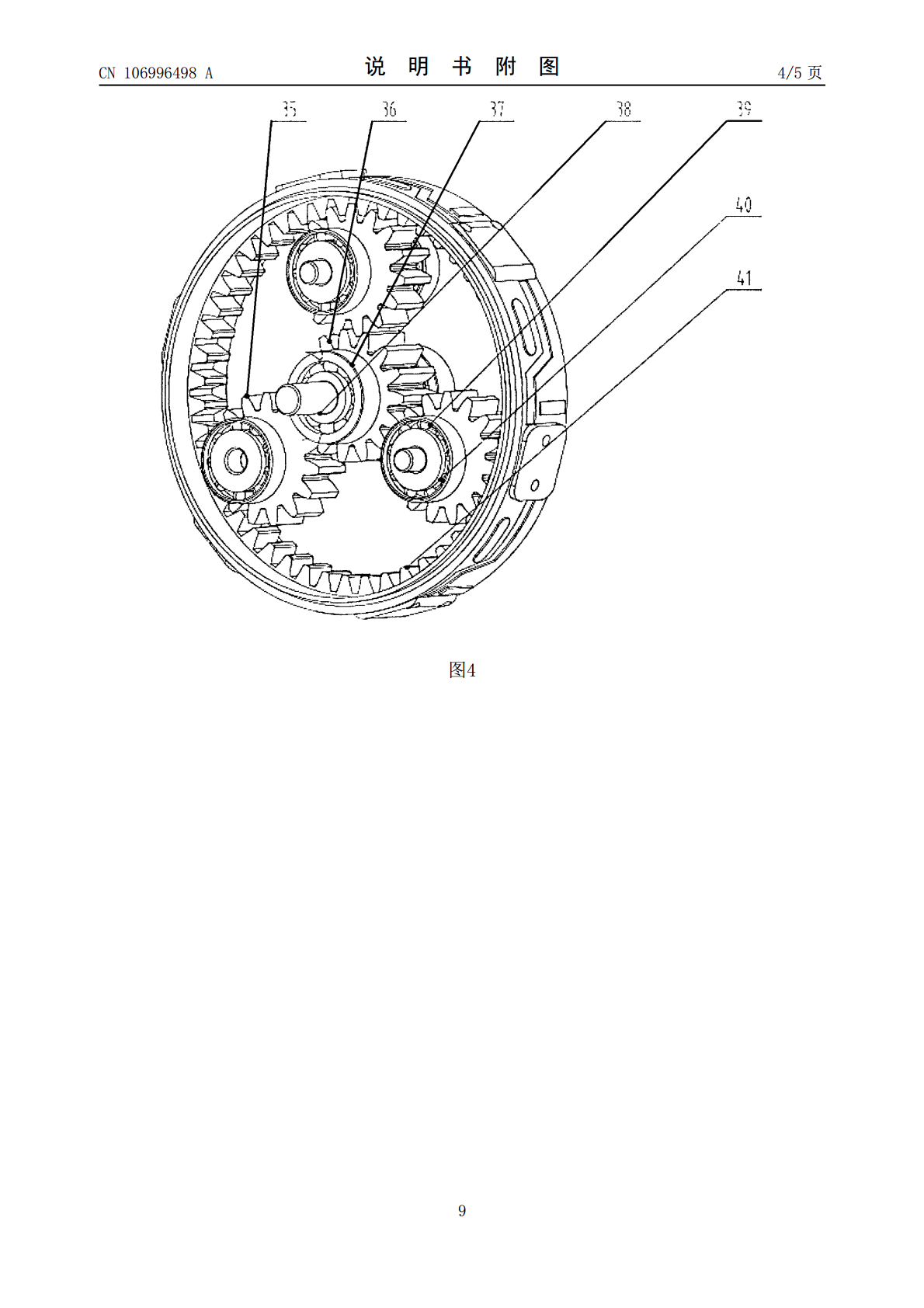
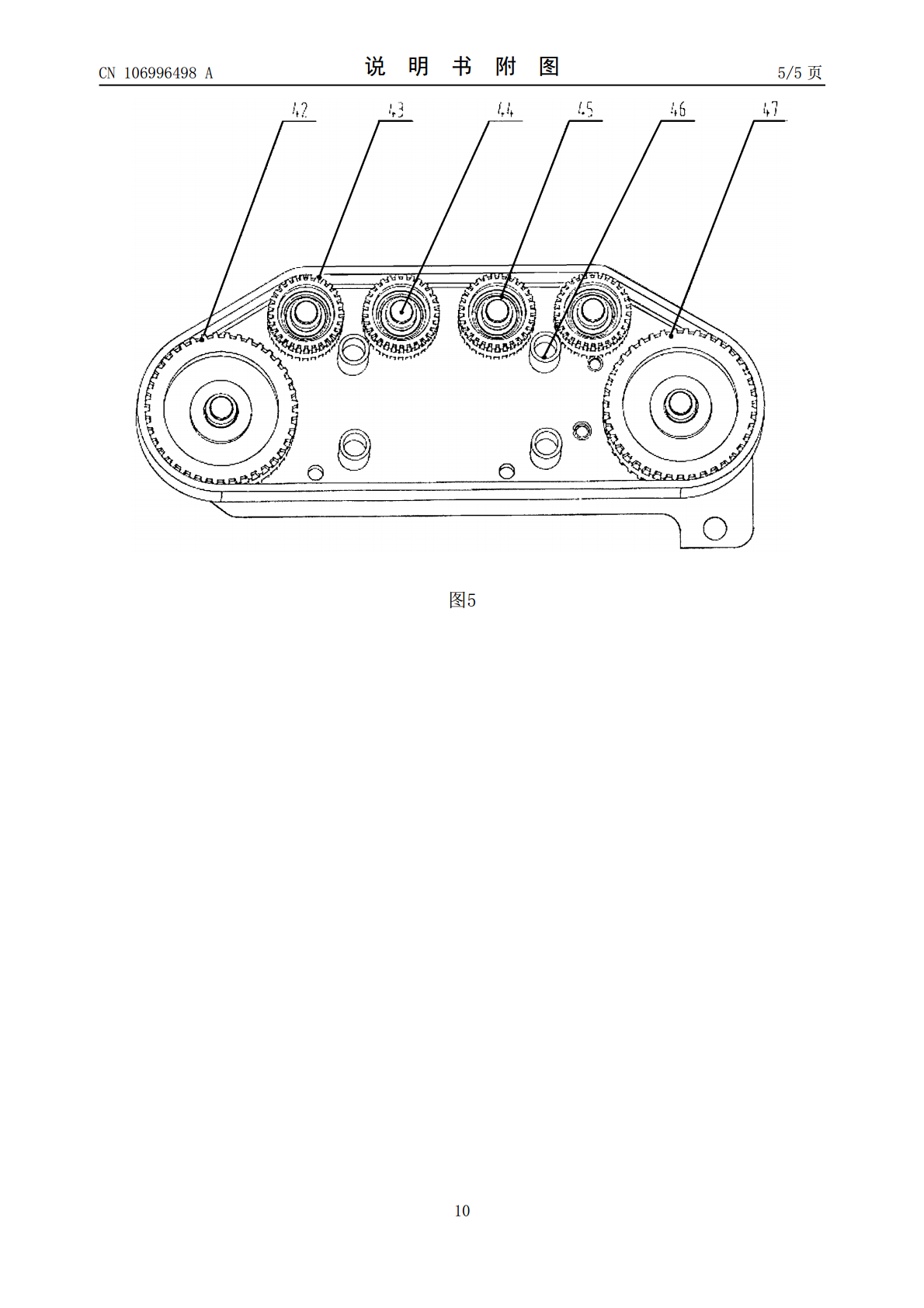
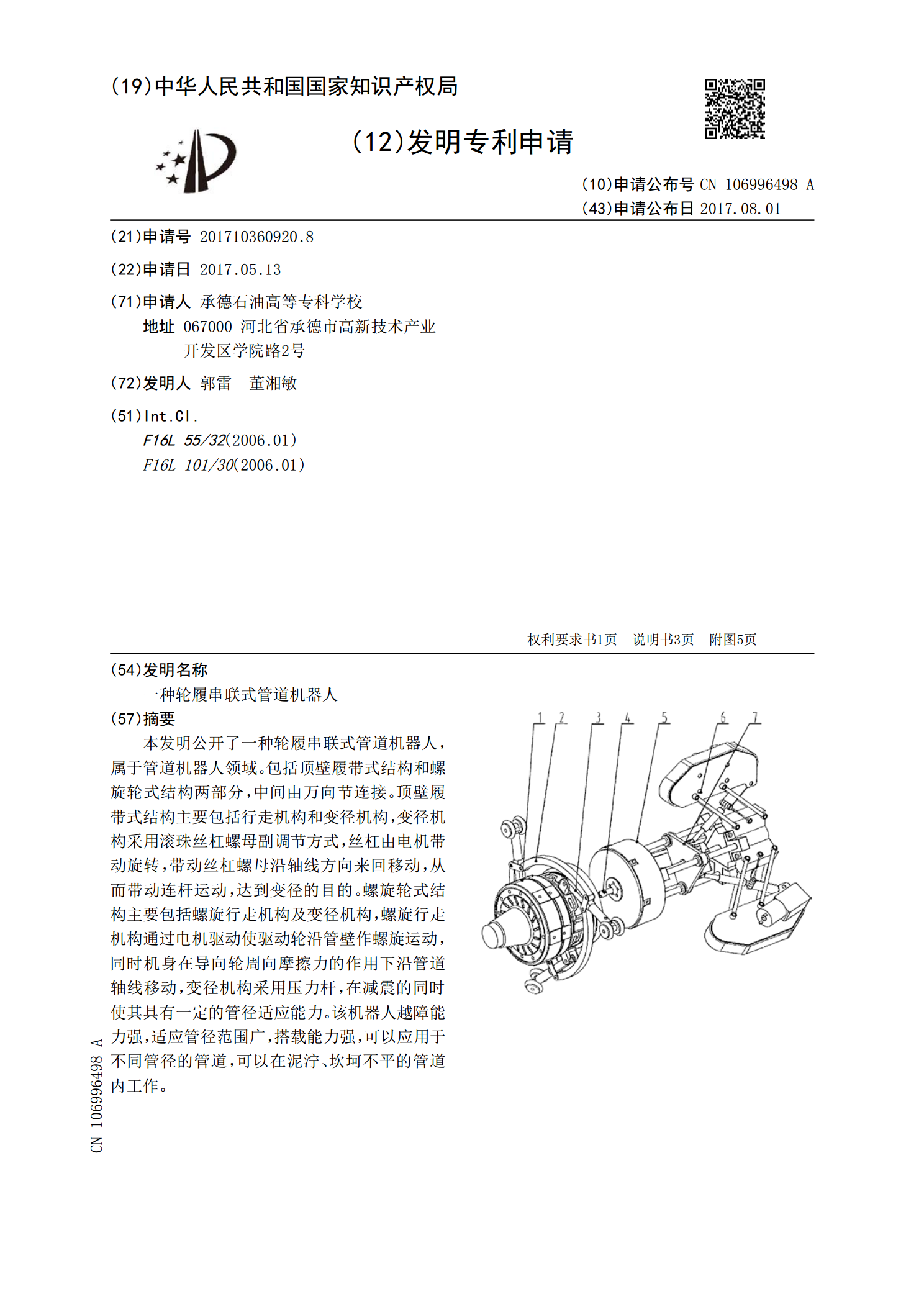
本发明公开了一种轮履串联式管道机器人,属于管道机器人领域。包括顶壁履带式结构和螺旋轮式结构两部分,中间由万向节连接。顶壁履带式结构主要包括行走机构和变径机构,变径机构采用滚珠丝杠螺母副调节方式,丝杠由电机带动旋转,带动丝杠螺母沿轴线方向来回移动,从而带动连杆运动,达到变径的目的。螺旋轮式结构主要包括螺旋行走机构及变径机构,螺旋行走机构通过电机驱动使驱动轮沿管壁作螺旋运动,同时机身在导向轮周向摩擦力的作用下沿管道轴线移动,变径机构采用压力杆,在减震的同时使其具有一定的管径适应能力。该机器人越障能力强,适应管
一种轮履复合式管道机器人.pdf
本发明公开了一种轮履复合式管道机器人,包括履带式行进驱动装置、两个从动轮装置和控制器,行进驱动装置上左右对称的设置两个L型支架,两个L型支架的一端固定在行进驱动装置上,另一端竖直向下,两个从动轮装置分别安装在两个L型支架上;从动轮装置包括从动轮,驱动从动轮升降的升降机构和驱动从动轮转向的转向机构;升降机构包括第一电机、第一主动齿轮、第一从动齿轮、丝杆和导杆;转向机构包括第二电机、第二主动齿轮、第二从动齿轮和转轴;从动轮上设置压力传感器;控制器与行进驱动装置、第一电机、第二电机以及压力传感器连接。本发明的轮

一种轮履复合径向可调式管道机器人.pdf
本发明公开了一种轮履复合径向可调式管道机器人。仿生式管道机器人移动速度慢且波动大,履带式管道机器人结构复杂,车型式管道机器人不能进入垂直管道。本发明包括多个轮履复合机构,每个轮履复合机构包括主壳体、径向调节机构、履带驱动行走机构和轮式支撑机构;两块安装侧板通过驱动带轮安装轴和从动带轮安装轴连接;驱动带轮安装轴上固定有驱动带轮,从动带轮安装轴上固定有从动带轮,驱动带轮与从动带轮通过履带连接;安装侧板通过从动摆杆与主壳体铰接;轮式支撑机构包括底板和滑轮;底板的两端均通过从动摆杆与主壳体铰接,一端的从动摆杆与一
一种变形轮装置、轮履腿行走装置及轮履腿机器人.pdf
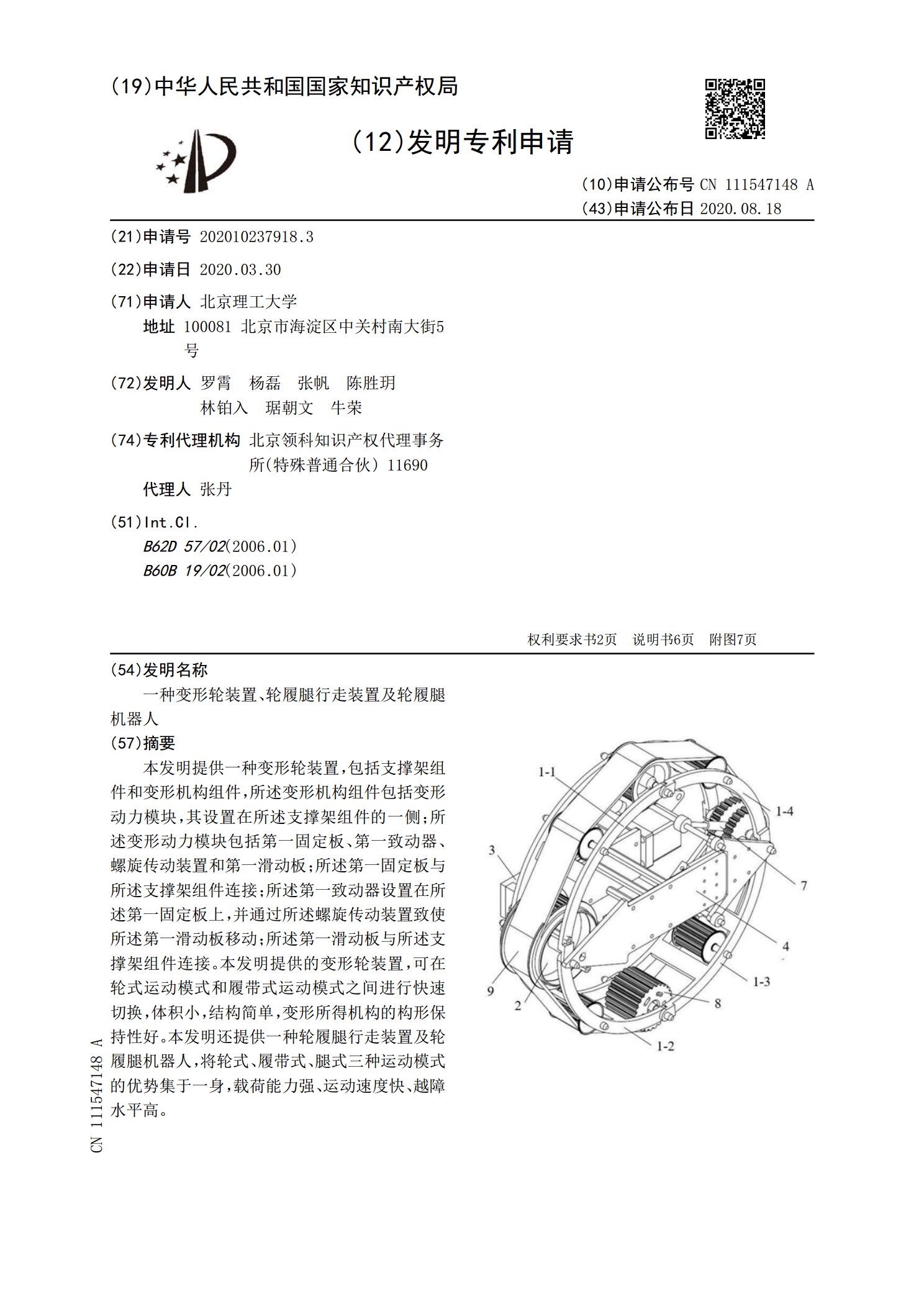
本发明提供一种变形轮装置,包括支撑架组件和变形机构组件,所述变形机构组件包括变形动力模块,其设置在所述支撑架组件的一侧;所述变形动力模块包括第一固定板、第一致动器、螺旋传动装置和第一滑动板;所述第一固定板与所述支撑架组件连接;所述第一致动器设置在所述第一固定板上,并通过所述螺旋传动装置致使所述第一滑动板移动;所述第一滑动板与所述支撑架组件连接。本发明提供的变形轮装置,可在轮式运动模式和履带式运动模式之间进行快速切换,体积小,结构简单,变形所得机构的构形保持性好。本发明还提供一种轮履腿行走装置及轮履腿机器人

一种轮履替换变形机器人.pdf
本发明涉及一种轮履替换变形机器人,属于专用机器人技术领域。本发明包括履带变形行走机构、轮式行走机构、轮履替换机构、底架;履带变形行走机构、轮履替换机构均安装在底架,轮式行走机构安装在轮履替换机构上。本发明该机器人轮履替换和变形功能能够提高机器人越障能力,且越障的灵活性高;能够提升机器人在恶劣地形环境下的生存能力;能使机器人有多种运动模式,可适应各种复杂地形环境;履带式运动机构和轮式运动机构相互独立,增加机器人的运动模式,且能够提高机器人的可重组能力;结构简单、轻巧,便于制造,使用方便。