
基于点云数据的车辆轮廓检测方法和装置.pdf

纪阳****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于点云数据的车辆轮廓检测方法和装置.pdf
本申请公开了基于点云数据的车辆轮廓检测方法和装置。所述的方法包括:获取待训练点云数据;响应于对待训练点云数据中的各点的标注,生成与待训练点云数据中的各点对应的标签数据,其中,标注用于指示各待训练点云数据中的各点是否属于车辆轮廓;基于待训练点云数据中的各点和与待训练点云数据中的各点对应的标签数据训练全卷积神经网络模型,以得到车辆检测模型;以及获取待检测点云数据,并基于车辆检测模型,得到与待检测点云数据中的各待检测点对应的检测结果。该实施方式实现了车辆轮廓的准确检测。
点云数据发送装置、点云数据发送方法、点云数据接收装置和点云数据接收方法.pdf
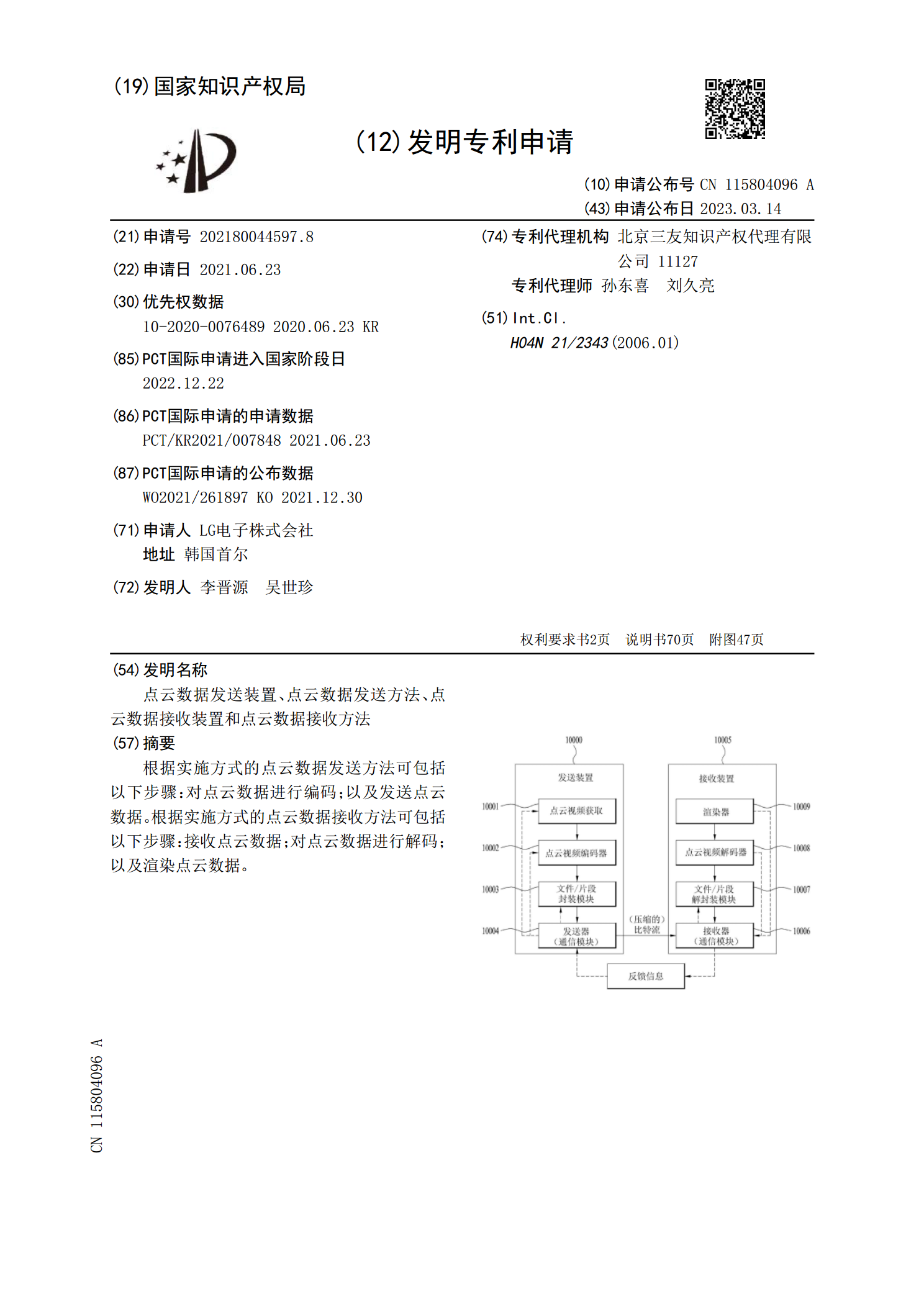
根据实施方式的点云数据发送方法可包括以下步骤:对点云数据进行编码;以及发送点云数据。根据实施方式的点云数据接收方法可包括以下步骤:接收点云数据;对点云数据进行解码;以及渲染点云数据。

点云数据发送装置、点云数据发送方法、点云数据接收装置和点云数据接收方法.pdf
根据实施方式的点云数据发送方法可包括以下步骤:对点云数据进行编码;和/或发送点云数据。根据实施方式的点云数据接收方法可包括以下步骤:接收点云数据;对点云数据进行解码;和/或渲染点云数据。
点云数据发送装置、点云数据发送方法、点云数据接收装置和点云数据接收方法.pdf
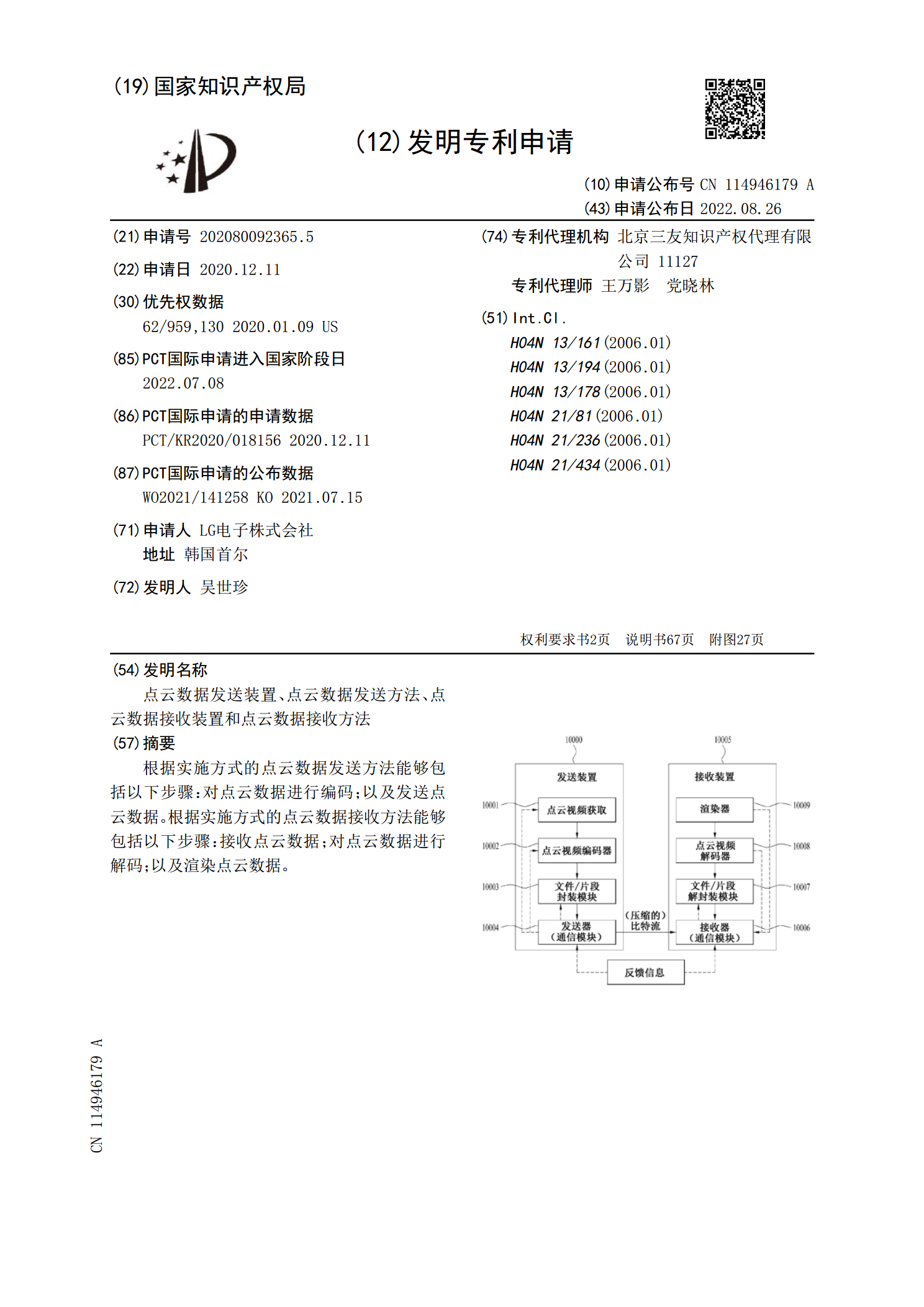
根据实施方式的点云数据发送方法能够包括以下步骤:对点云数据进行编码;以及发送点云数据。根据实施方式的点云数据接收方法能够包括以下步骤:接收点云数据;对点云数据进行解码;以及渲染点云数据。
点云数据发送装置、点云数据发送方法、点云数据接收装置和点云数据接收方法.pdf
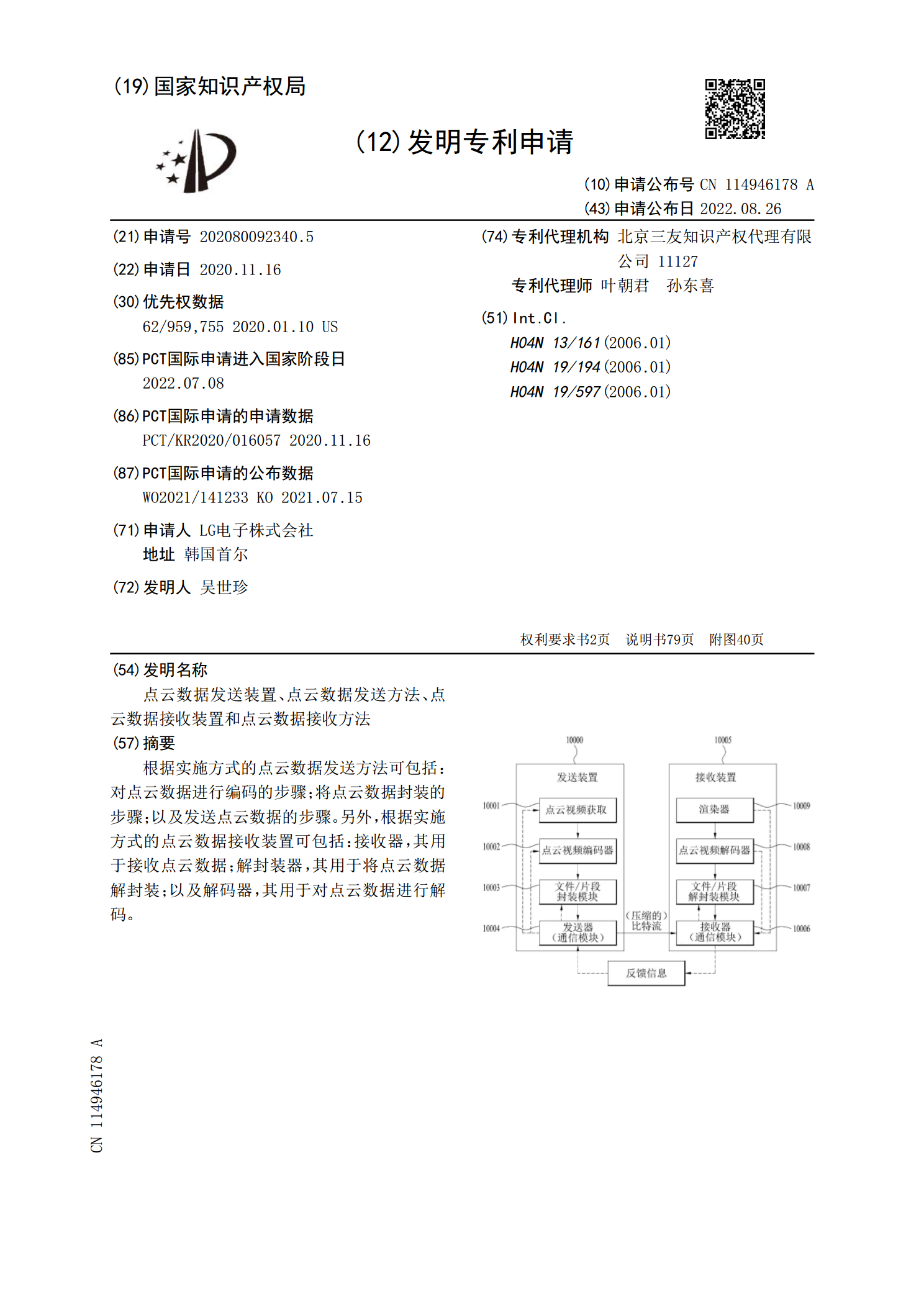
根据实施方式的点云数据发送方法可包括:对点云数据进行编码的步骤;将点云数据封装的步骤;以及发送点云数据的步骤。另外,根据实施方式的点云数据接收装置可包括:接收器,其用于接收点云数据;解封装器,其用于将点云数据解封装;以及解码器,其用于对点云数据进行解码。