
一种机器人用摆线差齿减速机.pdf

猫巷****傲柏

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机器人用摆线差齿减速机.pdf
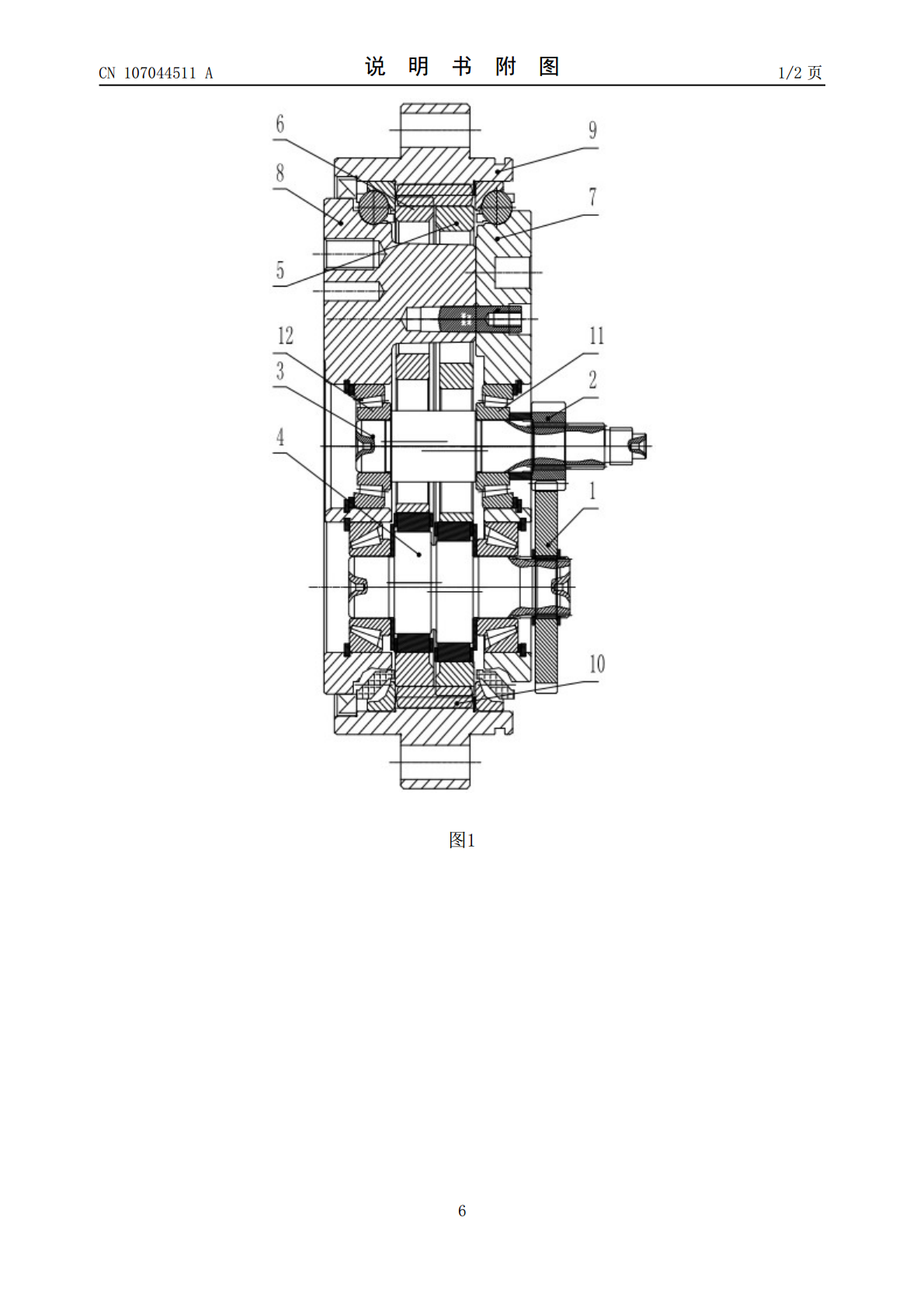
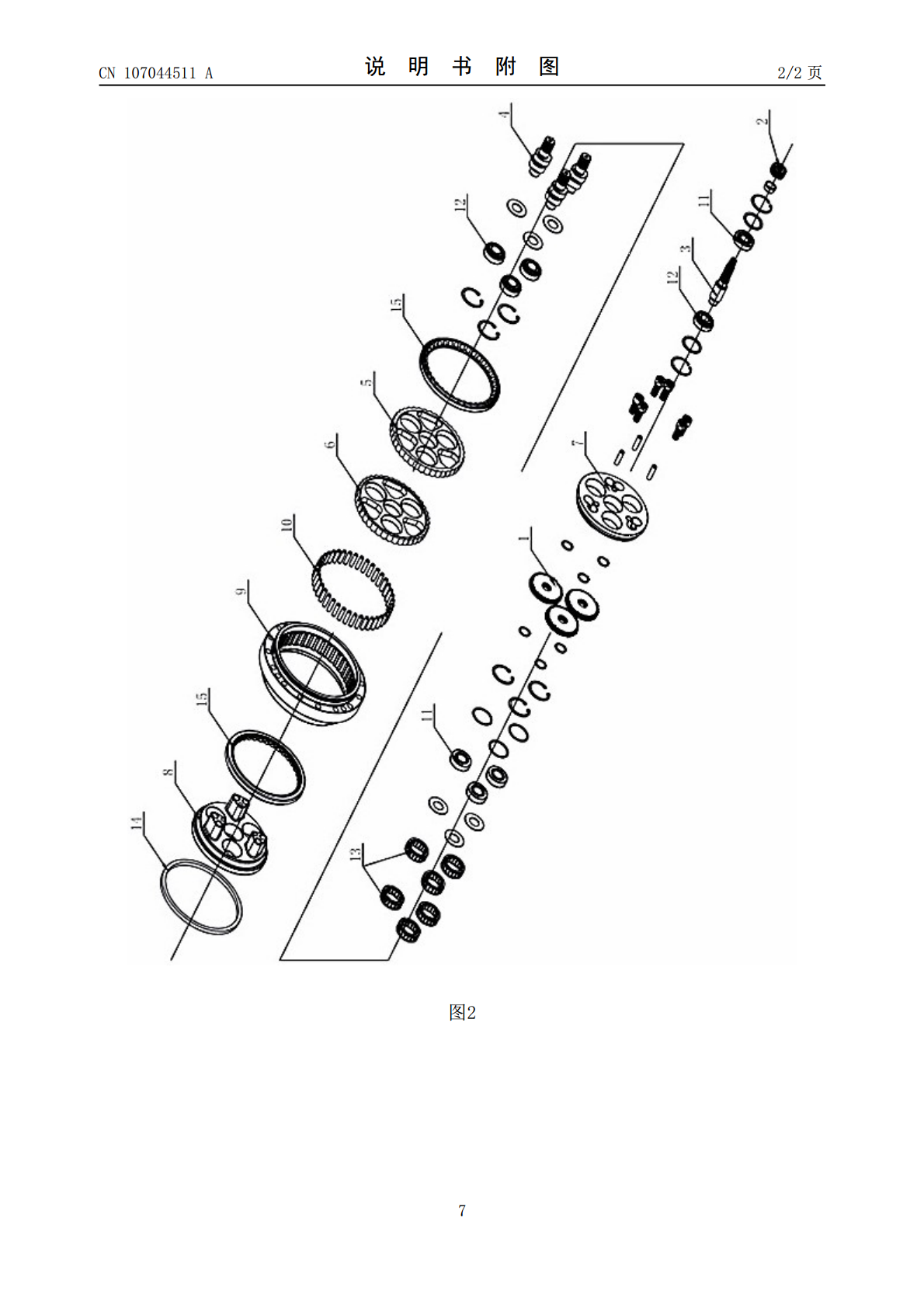
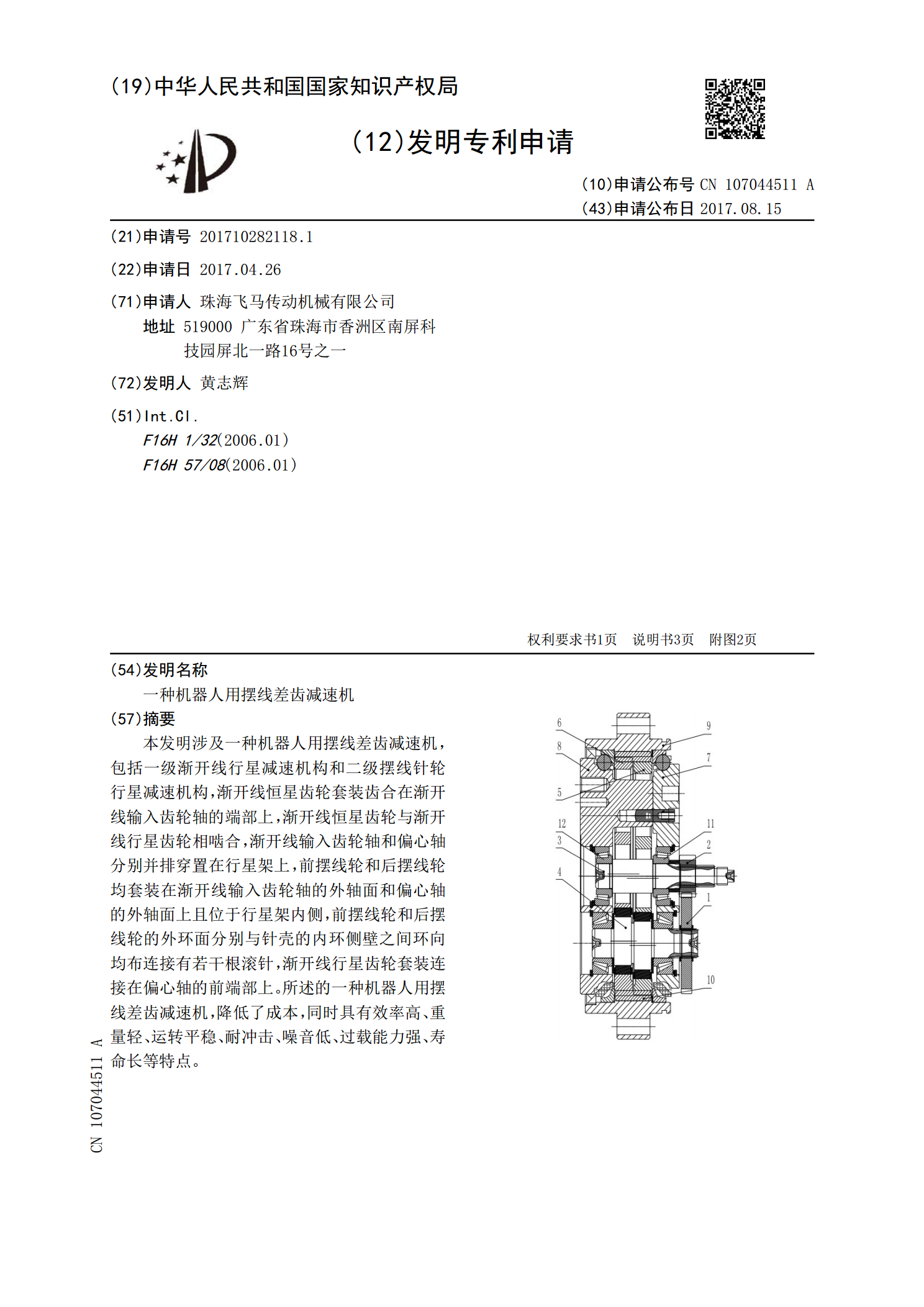
本发明涉及一种机器人用摆线差齿减速机,包括一级渐开线行星减速机构和二级摆线针轮行星减速机构,渐开线恒星齿轮套装齿合在渐开线输入齿轮轴的端部上,渐开线恒星齿轮与渐开线行星齿轮相啮合,渐开线输入齿轮轴和偏心轴分别并排穿置在行星架上,前摆线轮和后摆线轮均套装在渐开线输入齿轮轴的外轴面和偏心轴的外轴面上且位于行星架内侧,前摆线轮和后摆线轮的外环面分别与针壳的内环侧壁之间环向均布连接有若干根滚针,渐开线行星齿轮套装连接在偏心轴的前端部上。所述的一种机器人用摆线差齿减速机,降低了成本,同时具有效率高、重量轻、运转平稳
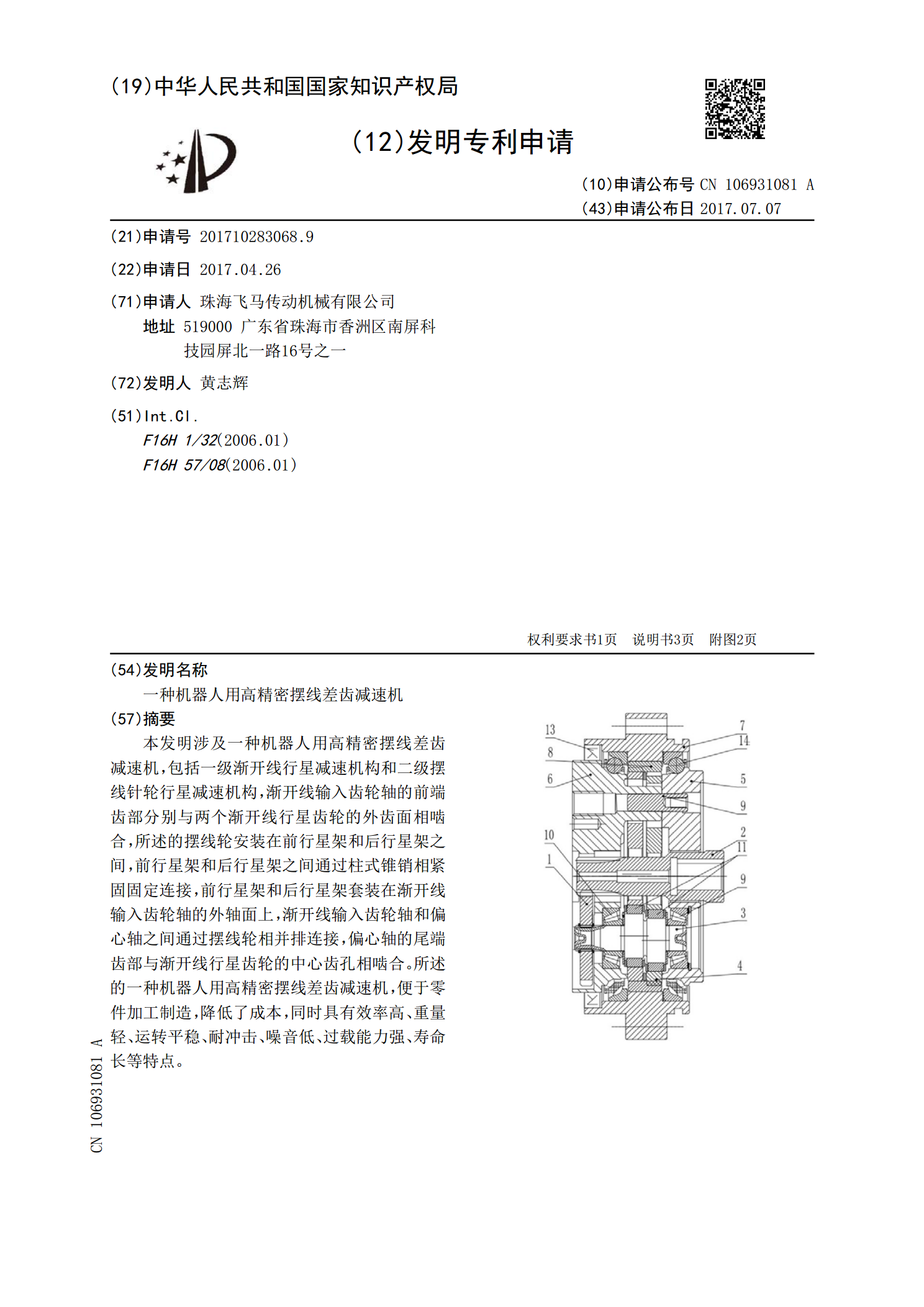
一种机器人用高精密摆线差齿减速机.pdf
本发明涉及一种机器人用高精密摆线差齿减速机,包括一级渐开线行星减速机构和二级摆线针轮行星减速机构,渐开线输入齿轮轴的前端齿部分别与两个渐开线行星齿轮的外齿面相啮合,所述的摆线轮安装在前行星架和后行星架之间,前行星架和后行星架之间通过柱式锥销相紧固固定连接,前行星架和后行星架套装在渐开线输入齿轮轴的外轴面上,渐开线输入齿轮轴和偏心轴之间通过摆线轮相并排连接,偏心轴的尾端齿部与渐开线行星齿轮的中心齿孔相啮合。所述的一种机器人用高精密摆线差齿减速机,便于零件加工制造,降低了成本,同时具有效率高、重量轻、运转平稳
一种齿差摆线齿轮减速机构.pdf
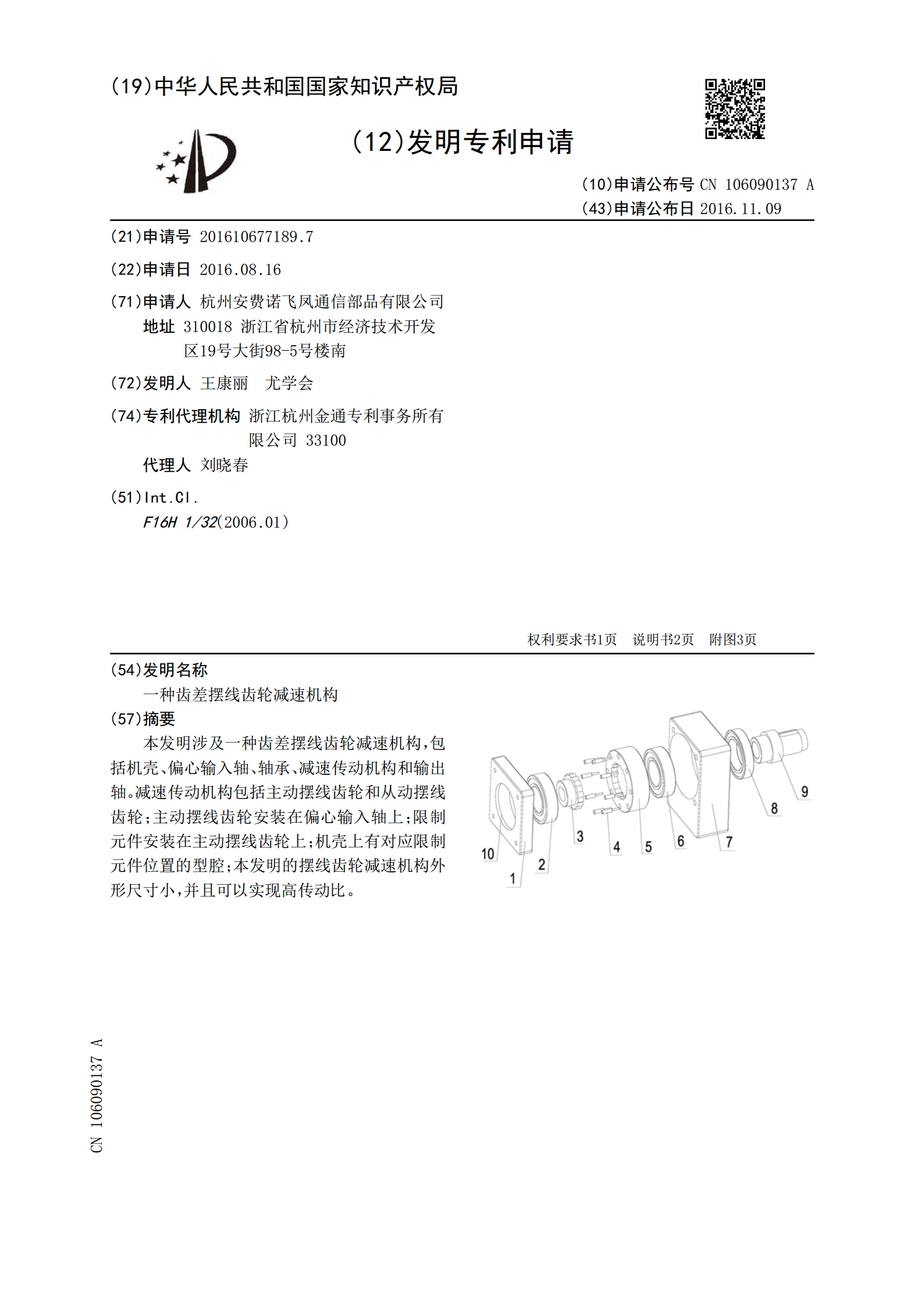
本发明涉及一种齿差摆线齿轮减速机构,包括机壳、偏心输入轴、轴承、减速传动机构和输出轴。减速传动机构包括主动摆线齿轮和从动摆线齿轮;主动摆线齿轮安装在偏心输入轴上;限制元件安装在主动摆线齿轮上;机壳上有对应限制元件位置的型腔;本发明的摆线齿轮减速机构外形尺寸小,并且可以实现高传动比。

少齿差高精度摆线齿轮减速机.pdf
本发明涉及一种少齿差高精度摆线齿轮减速机,包括输入轴、减速机构以及输出轴,减速机构包括齿圈、摆线齿片、做保持架以及偏心轴;摆线齿片经第一偏心组件偏心设置在输入轴上;保持架包括两保持端盖和连接柱,连接柱连接位于保持端盖,偏心轴穿过穿齿轴孔,偏心轴与摆线齿片的穿齿轴孔之间设置第二偏心组件,两保持端盖上分别开设有穿盖轴孔,偏心轴的两端与保持端盖的穿盖轴孔之间设置第三偏心组件;本发明的摆线齿轮减速机体积小,各减速部件之间可以实现紧配,提高整个减速机的精度,并且可实现高传动比。
一种摆线针齿减速机.pdf
本发明属于精密传动技术领域,涉及一种摆线针齿减速机。所述摆线针齿减速机由两级传动组成,第一级传动由输入齿轮轴(1)、行星齿轮(2)组成一对啮合齿轮副,第二级传动由摆线轮(3)、针齿(4)、主壳体(5)组成摆线齿轮啮合副;本发明摆线针齿减速机可以非常方便地调整行星直齿轮的角向啮合位置,最大程度保证了功率分流机构的均载性,同时由于采用胀套的连接结构,消除了原来花键之间的间隙,有助于提高减速机精度。本发明摆线针齿减速机,不再需要专用花键制造设备制造曲柄轴,同时也不需要花键插齿设备加工行星直齿轮的内花键,也不需要