
车辆用转向操纵装置.pdf

一吃****新冬


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆用转向操纵装置.pdf
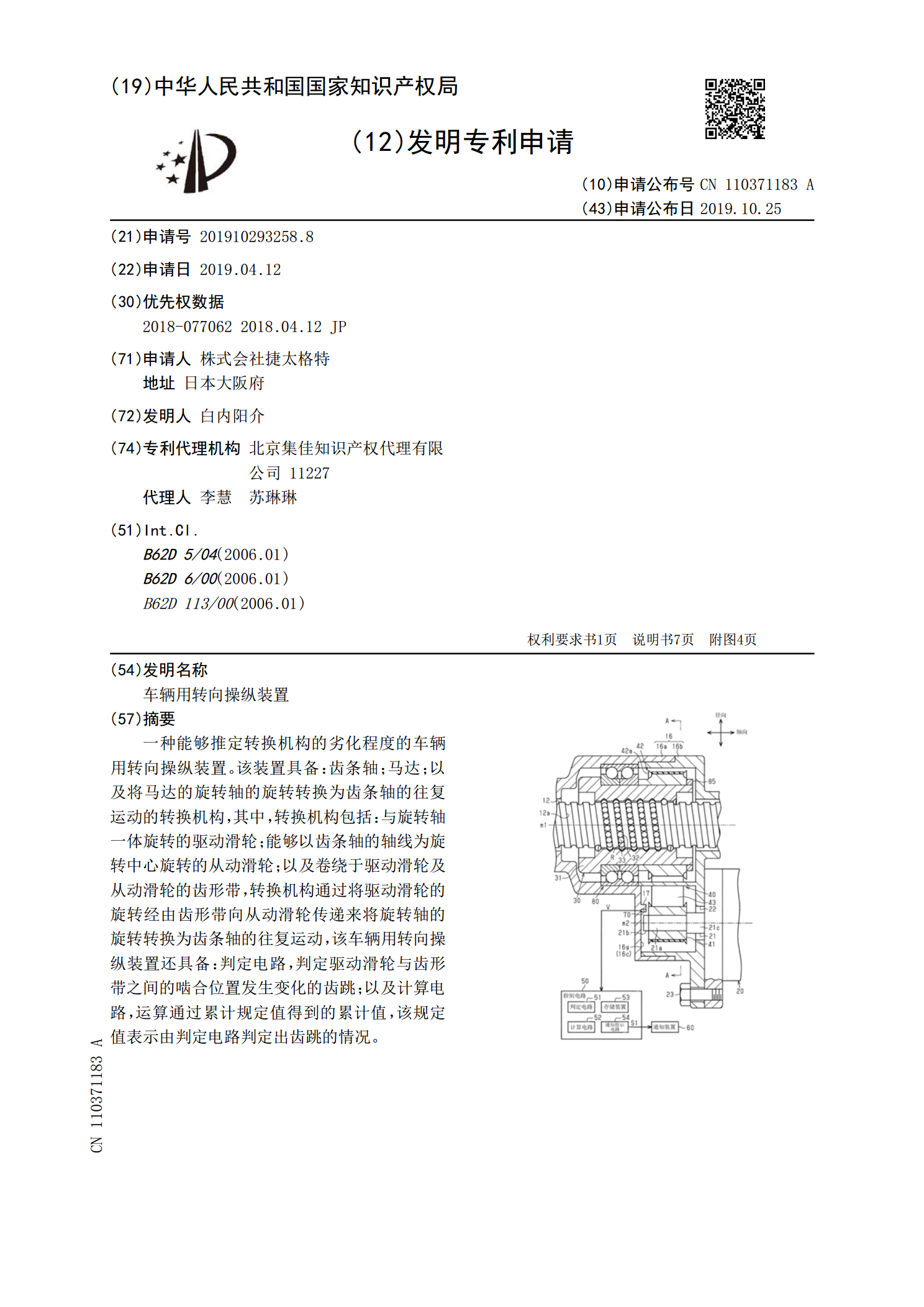
一种能够推定转换机构的劣化程度的车辆用转向操纵装置。该装置具备:齿条轴;马达;以及将马达的旋转轴的旋转转换为齿条轴的往复运动的转换机构,其中,转换机构包括:与旋转轴一体旋转的驱动滑轮;能够以齿条轴的轴线为旋转中心旋转的从动滑轮;以及卷绕于驱动滑轮及从动滑轮的齿形带,转换机构通过将驱动滑轮的旋转经由齿形带向从动滑轮传递来将旋转轴的旋转转换为齿条轴的往复运动,该车辆用转向操纵装置还具备:判定电路,判定驱动滑轮与齿形带之间的啮合位置发生变化的齿跳;以及计算电路,运算通过累计规定值得到的累计值,该规定值表示由判定
车辆用转向操纵装置.pdf
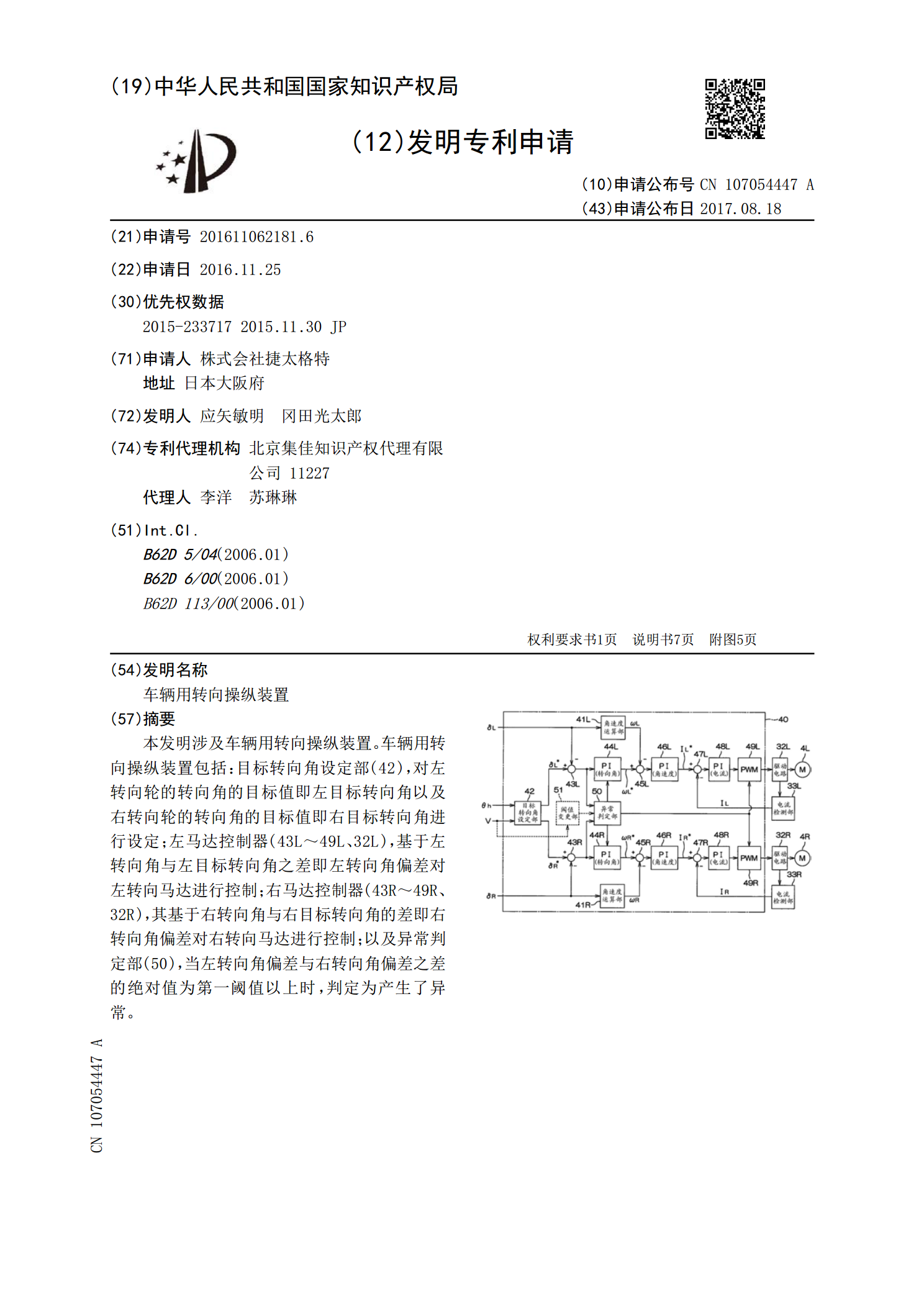
本发明涉及车辆用转向操纵装置。车辆用转向操纵装置包括:目标转向角设定部(42),对左转向轮的转向角的目标值即左目标转向角以及右转向轮的转向角的目标值即右目标转向角进行设定;左马达控制器(43L~49L、32L),基于左转向角与左目标转向角之差即左转向角偏差对左转向马达进行控制;右马达控制器(43R~49R、32R),其基于右转向角与右目标转向角的差即右转向角偏差对右转向马达进行控制;以及异常判定部(50),当左转向角偏差与右转向角偏差之差的绝对值为第一阈值以上时,判定为产生了异常。
车辆用转向操纵装置.pdf
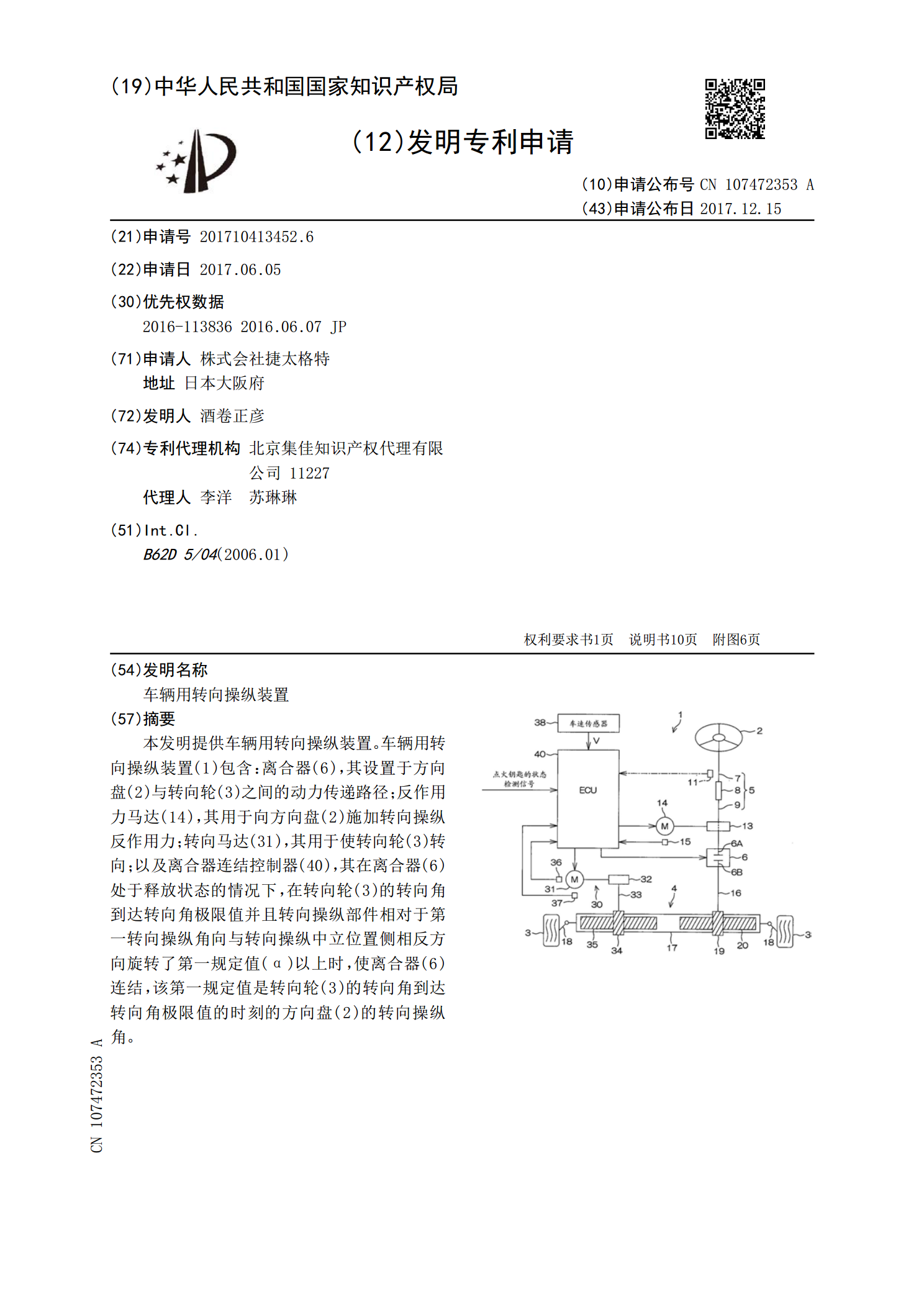
本发明提供车辆用转向操纵装置。车辆用转向操纵装置(1)包含:离合器(6),其设置于方向盘(2)与转向轮(3)之间的动力传递路径;反作用力马达(14),其用于向方向盘(2)施加转向操纵反作用力;转向马达(31),其用于使转向轮(3)转向;以及离合器连结控制器(40),其在离合器(6)处于释放状态的情况下,在转向轮(3)的转向角到达转向角极限值并且转向操纵部件相对于第一转向操纵角向与转向操纵中立位置侧相反方向旋转了第一规定值(α)以上时,使离合器(6)连结,该第一规定值是转向轮(3)的转向角到达转向角极限值的
车辆用转向操纵装置.pdf
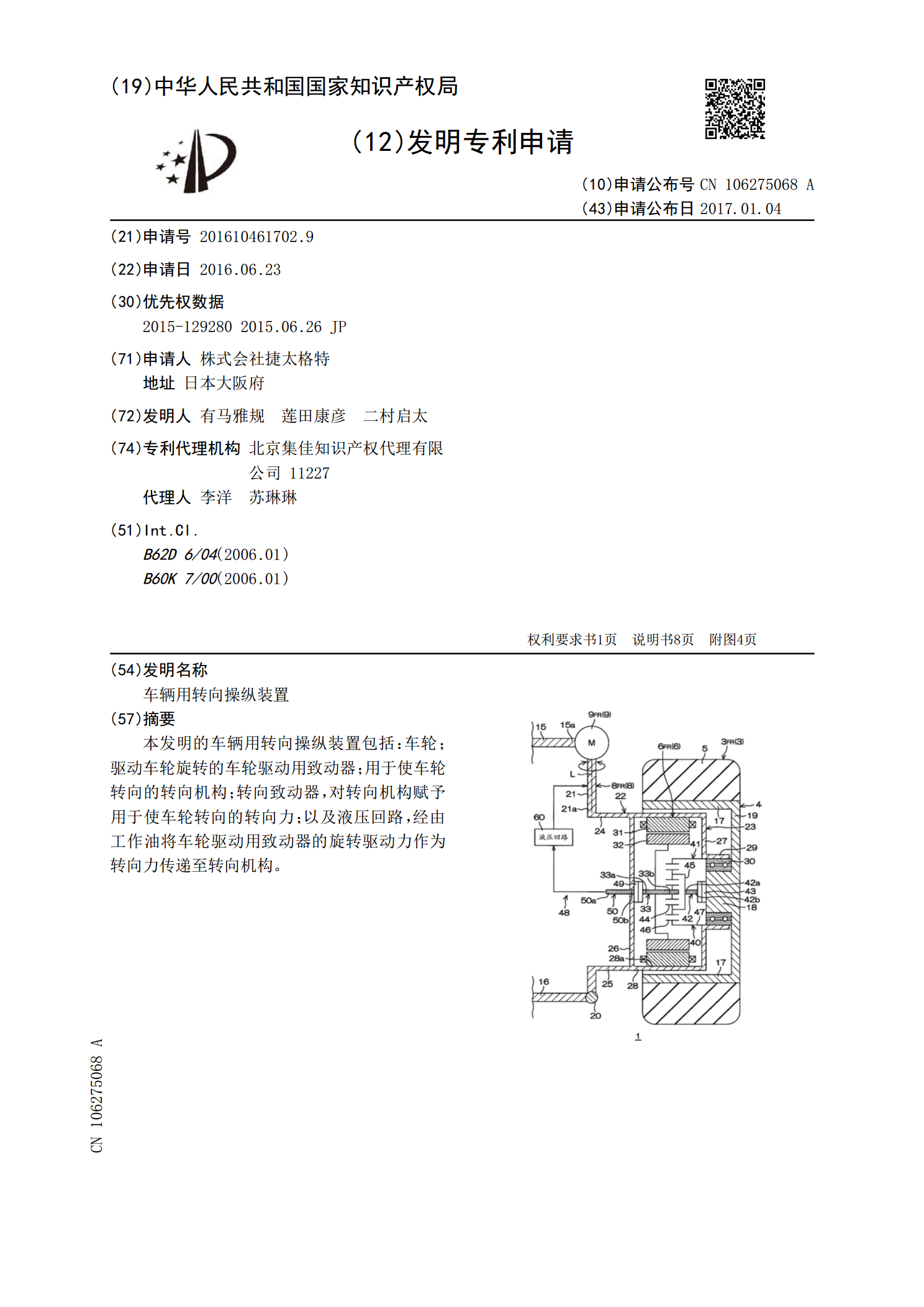
本发明的车辆用转向操纵装置包括:车轮;驱动车轮旋转的车轮驱动用致动器;用于使车轮转向的转向机构;转向致动器,对转向机构赋予用于使车轮转向的转向力;以及液压回路,经由工作油将车轮驱动用致动器的旋转驱动力作为转向力传递至转向机构。
车辆用转向操纵装置.pdf
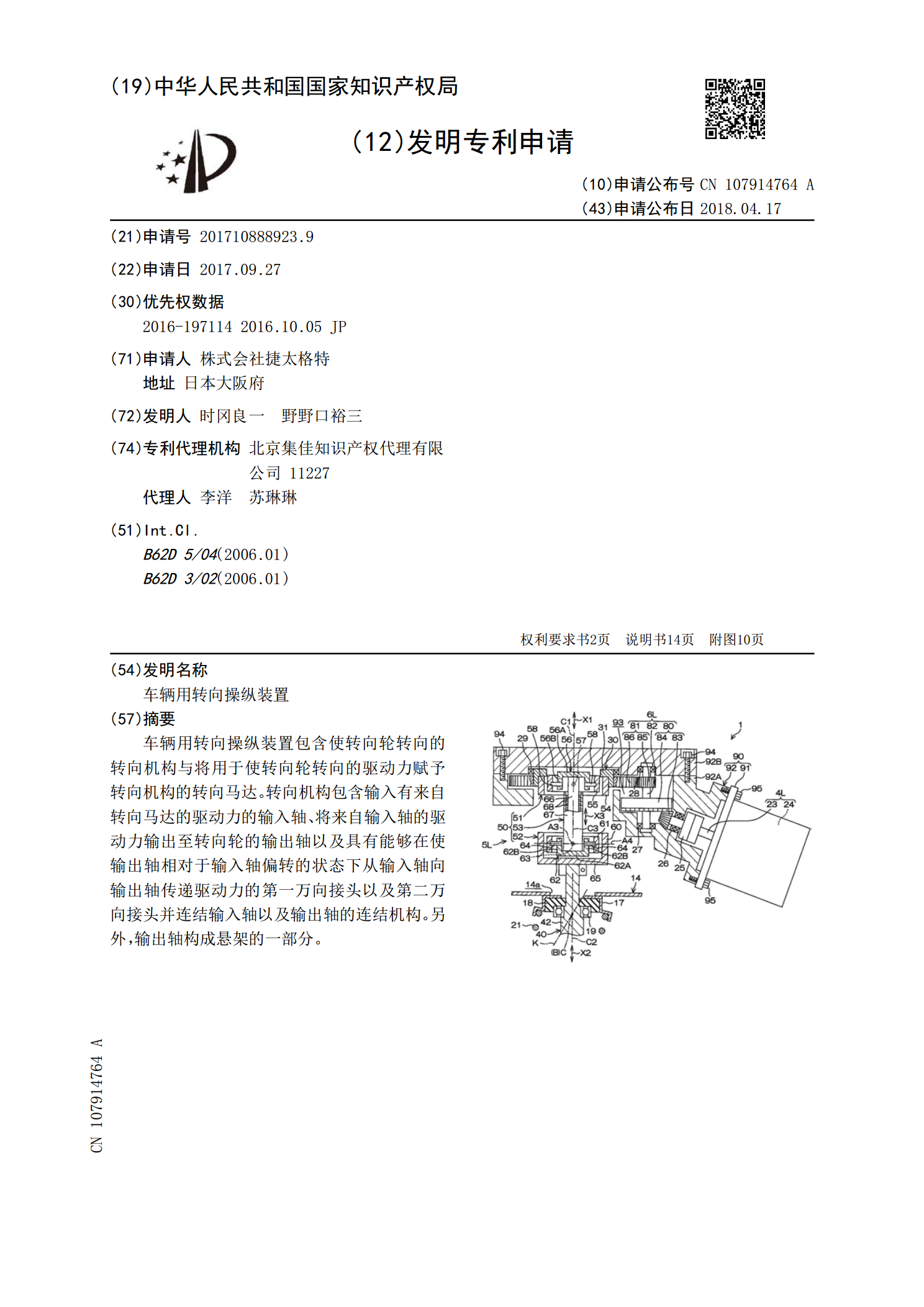
车辆用转向操纵装置包含使转向轮转向的转向机构与将用于使转向轮转向的驱动力赋予转向机构的转向马达。转向机构包含输入有来自转向马达的驱动力的输入轴、将来自输入轴的驱动力输出至转向轮的输出轴以及具有能够在使输出轴相对于输入轴偏转的状态下从输入轴向输出轴传递驱动力的第一万向接头以及第二万向接头并连结输入轴以及输出轴的连结机构。另外,输出轴构成悬架的一部分。