
一种用于抓取扁平物体的机械手.pdf

mm****酱吖

1/8

2/8
3/8
4/8

5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于抓取扁平物体的机械手.pdf
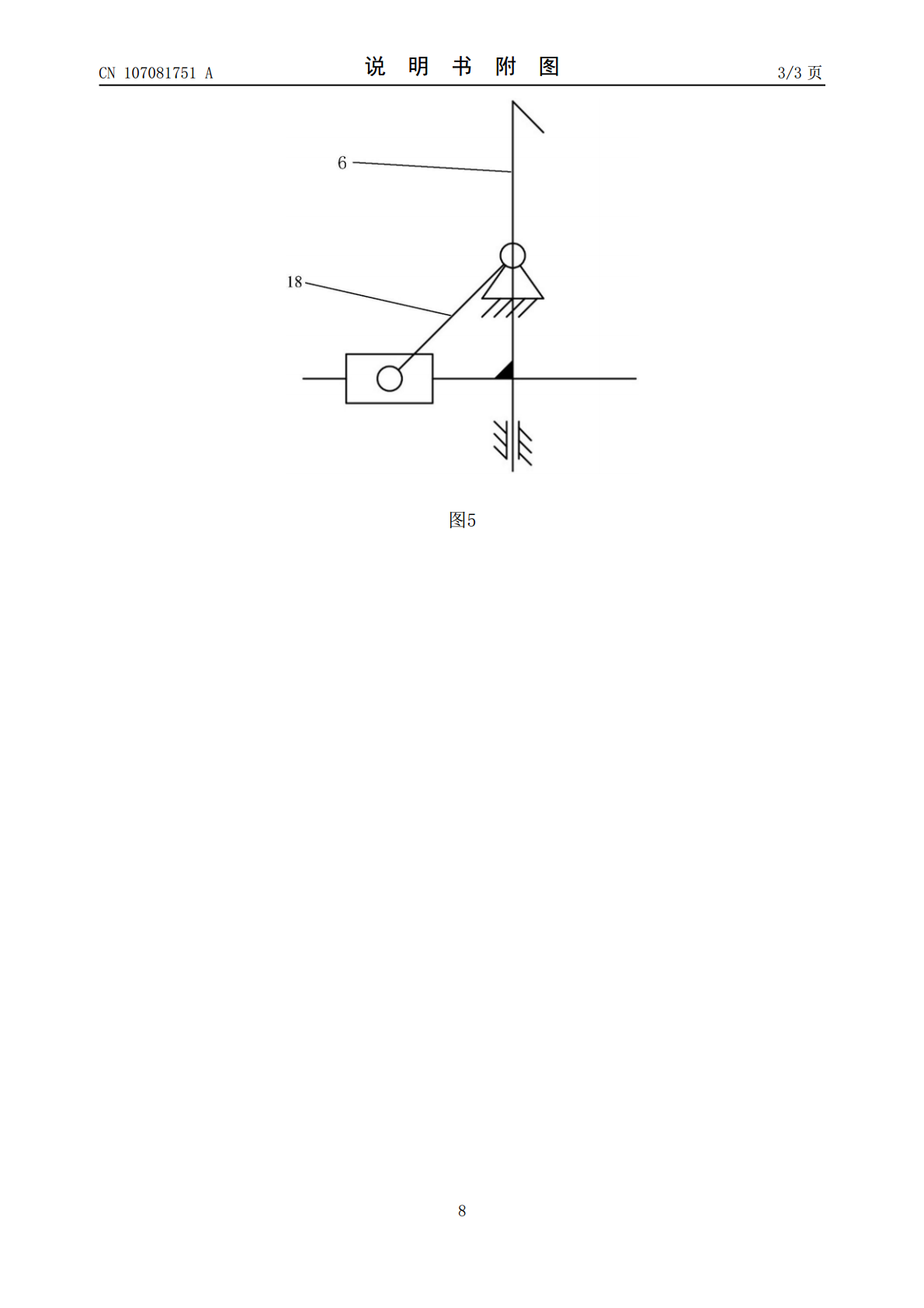
一种用于抓取扁平物体的机械手属于机械设计中的机构设计领域。它包括平台、蜗轮蜗杆机构、电动机、直钩驱动机构和连杆机构。工作时电动机带动蜗轮蜗杆机构,进而带动直钩驱动机构,驱动直钩依次完成向上运动、水平运动和向下运动,最终将扁平物体固定在平台的正中间。其中,直钩驱动机构依靠螺母和丝杠之间的传动角实现螺母的转动和水平运动,自由度为2,在螺母和滑块卡死时水平运动,未卡死时则实现螺母的转动。该机构仅使用一个电动机即可实现直钩的上升、水平运动和下降,控制简单,响应速度快。

用于抓取物体的抓取装置.pdf
一种用于抓取物体(16)的抓取装置(10),其具有抓取部分(14)和负压源(18),该负压源(18)借助流动连接部(20)与位于所述抓取部分(14)上的、用于抓取所述物体(16)的抽吸室(22)气动地连接,在考虑以简单结构的部件实现以有利的方式可靠地抓取几何形状不规则的物体的情况下,该抓取装置设计和扩展为,在抓取部分(14)上布置有多个彼此相邻的边界元件(24),边界元件(24)借助于引导装置(26)彼此独立地以在所述抓取部分(14)上移动的方式引导,并且所述边界元件(24)以其整体形成密封所述抽吸室(2

一种用于无规则物体抓取的活塞式机械手.pdf
本发明公开了一种用于无规则物体抓取的活塞式机械手,包括固定架、支撑架、气缸和抓取机构,所述固定架固定在支撑架上方,所述气缸固定在固定架上,所述气缸动力输出至活塞杆的一端,所述活塞杆向下延伸至支撑架,所述抓取机构安装在支撑架内,所述活塞杆的另一端与抓取机构相连接,所述抓取机构包括连接盘、上连接杆和下连接杆,所述连接盘的边缘处设有个呈中心对称的连接槽,四根所述上连接杆的顶端通过铰接件分别铰接至连接槽,所述上连接杆的底端分别通过铰接件与四根下连接杆顶端铰接,所述下连接杆的中间位置通过铰接件与支撑架的底部铰接,每
一种用于水下抓取棒料的机械手爪.pdf
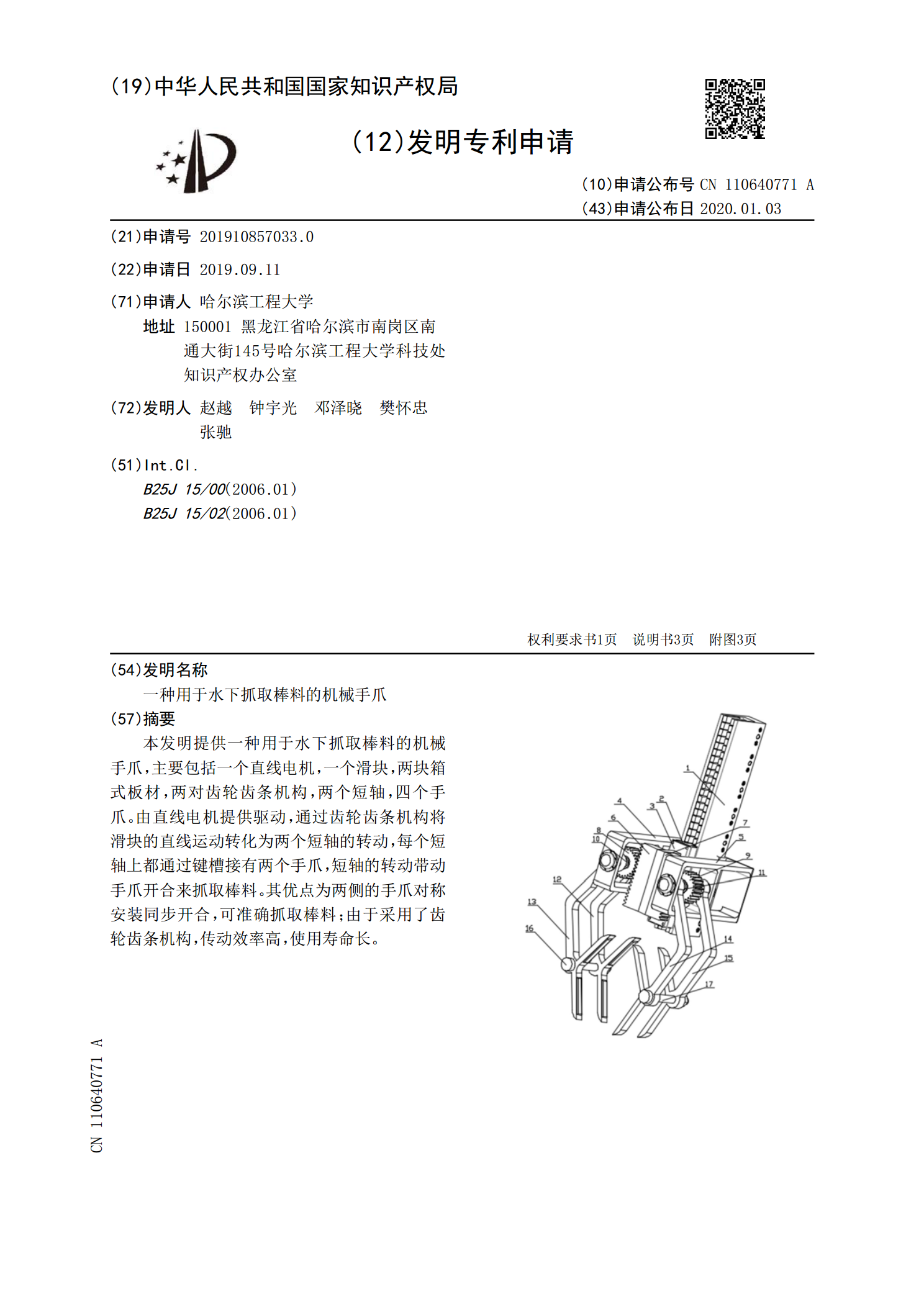
本发明提供一种用于水下抓取棒料的机械手爪,主要包括一个直线电机,一个滑块,两块箱式板材,两对齿轮齿条机构,两个短轴,四个手爪。由直线电机提供驱动,通过齿轮齿条机构将滑块的直线运动转化为两个短轴的转动,每个短轴上都通过键槽接有两个手爪,短轴的转动带动手爪开合来抓取棒料。其优点为两侧的手爪对称安装同步开合,可准确抓取棒料;由于采用了齿轮齿条机构,传动效率高,使用寿命长。
一种用于上下料抓取的机械手臂.pdf
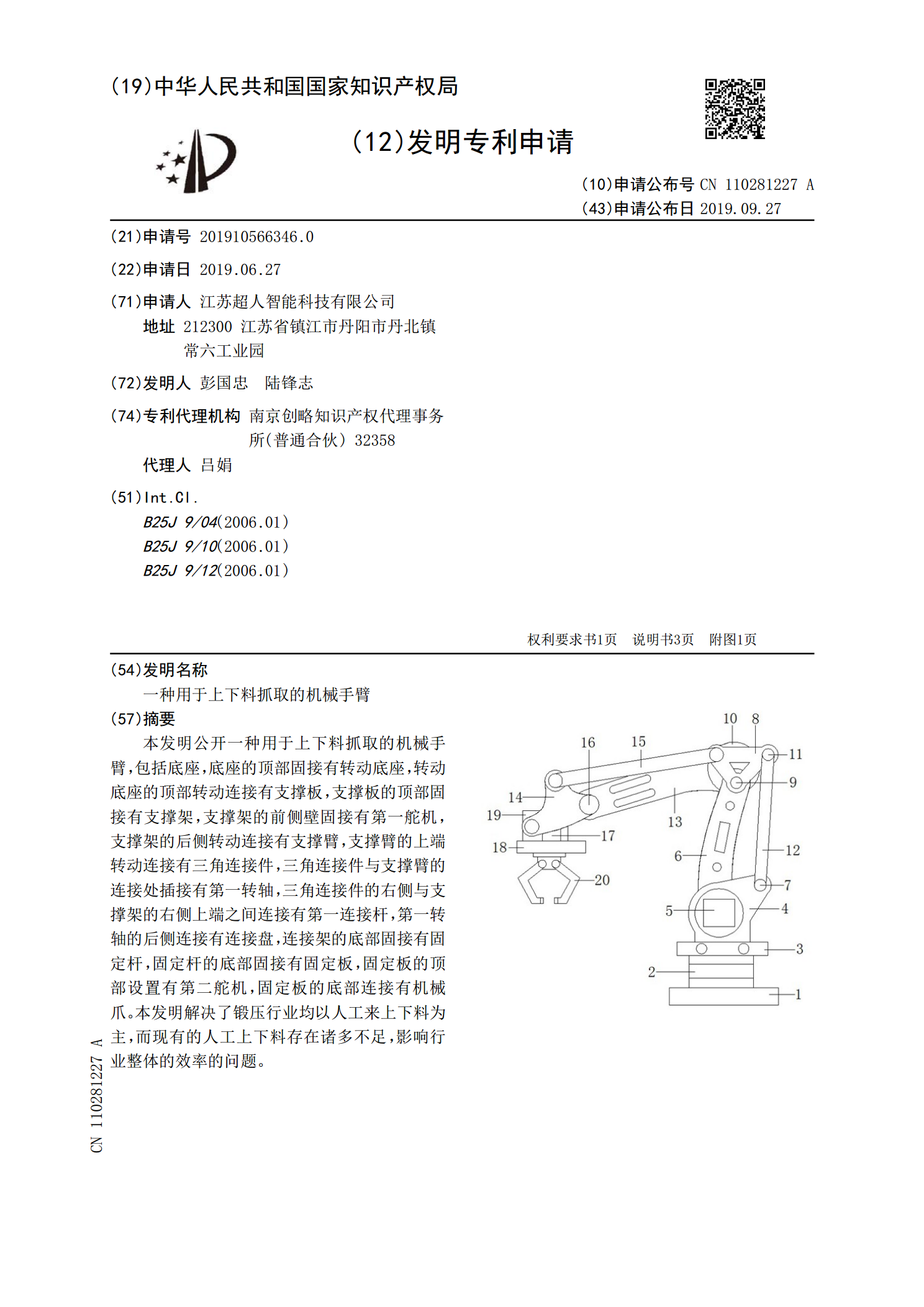
本发明公开一种用于上下料抓取的机械手臂,包括底座,底座的顶部固接有转动底座,转动底座的顶部转动连接有支撑板,支撑板的顶部固接有支撑架,支撑架的前侧壁固接有第一舵机,支撑架的后侧转动连接有支撑臂,支撑臂的上端转动连接有三角连接件,三角连接件与支撑臂的连接处插接有第一转轴,三角连接件的右侧与支撑架的右侧上端之间连接有第一连接杆,第一转轴的后侧连接有连接盘,连接架的底部固接有固定杆,固定杆的底部固接有固定板,固定板的顶部设置有第二舵机,固定板的底部连接有机械爪。本发明解决了锻压行业均以人工来上下料为主,而现有的