
一种用于上下料抓取的机械手臂.pdf

努力****幻翠

1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
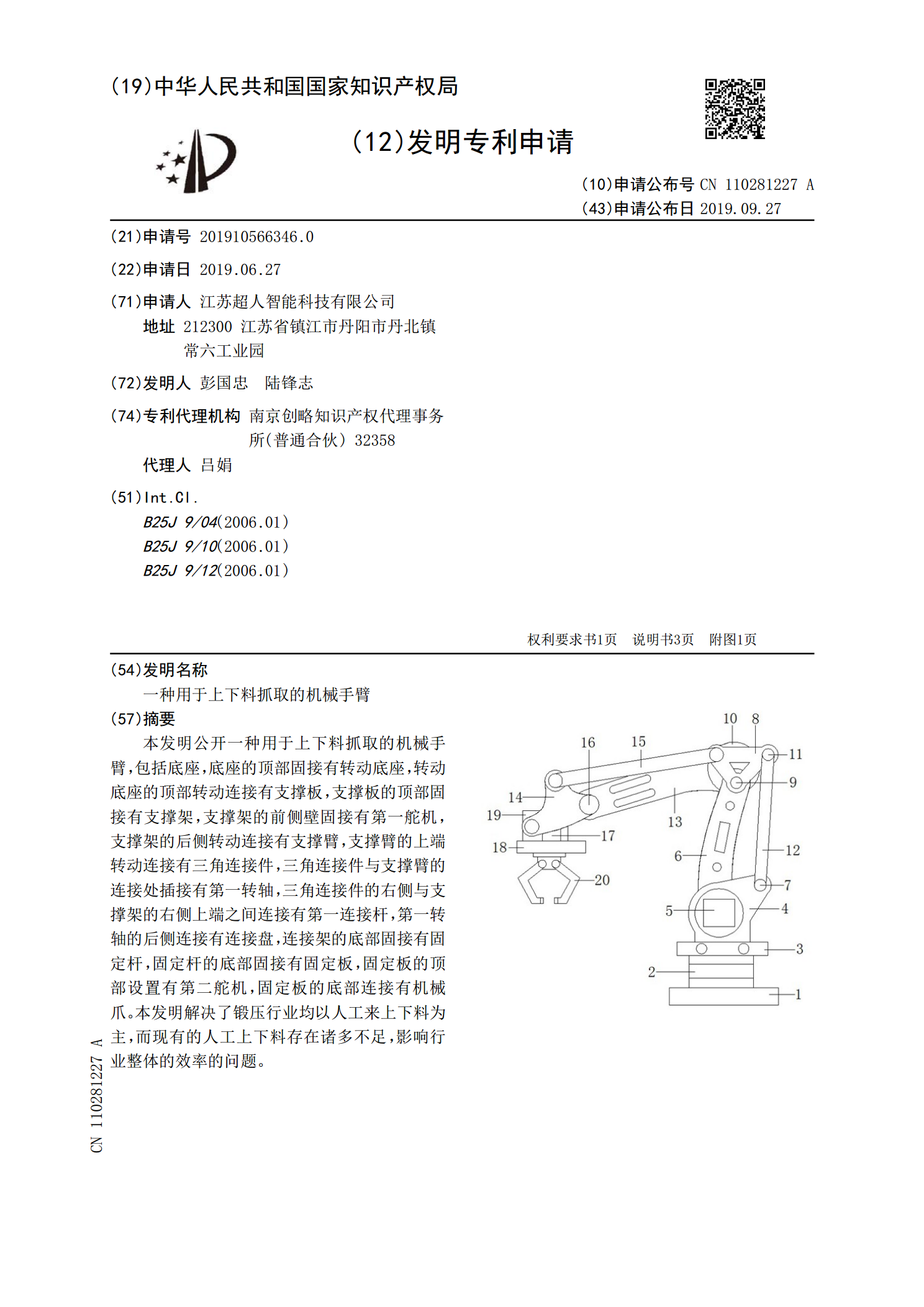
一种用于上下料抓取的机械手臂.pdf
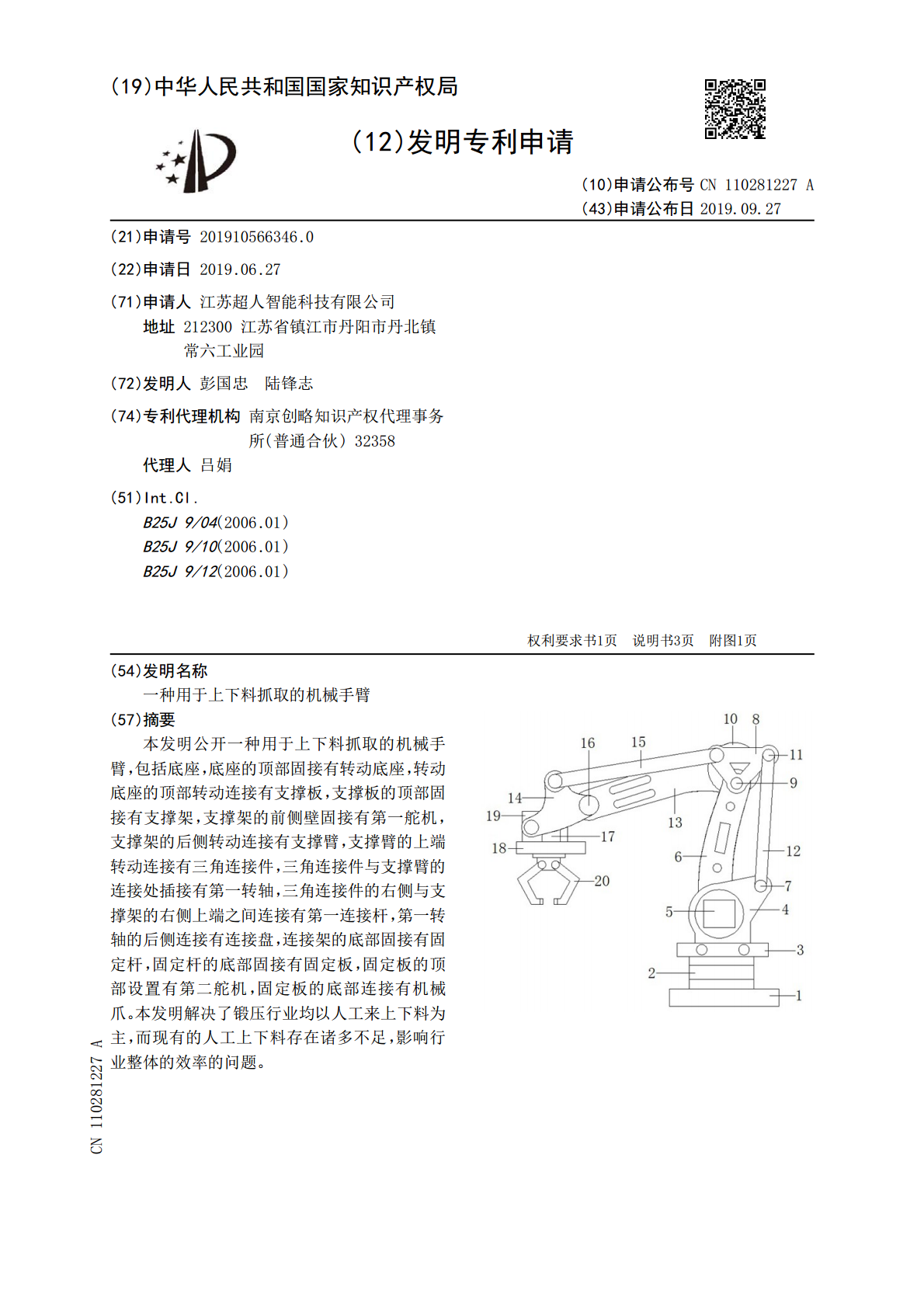
本发明公开一种用于上下料抓取的机械手臂,包括底座,底座的顶部固接有转动底座,转动底座的顶部转动连接有支撑板,支撑板的顶部固接有支撑架,支撑架的前侧壁固接有第一舵机,支撑架的后侧转动连接有支撑臂,支撑臂的上端转动连接有三角连接件,三角连接件与支撑臂的连接处插接有第一转轴,三角连接件的右侧与支撑架的右侧上端之间连接有第一连接杆,第一转轴的后侧连接有连接盘,连接架的底部固接有固定杆,固定杆的底部固接有固定板,固定板的顶部设置有第二舵机,固定板的底部连接有机械爪。本发明解决了锻压行业均以人工来上下料为主,而现有的
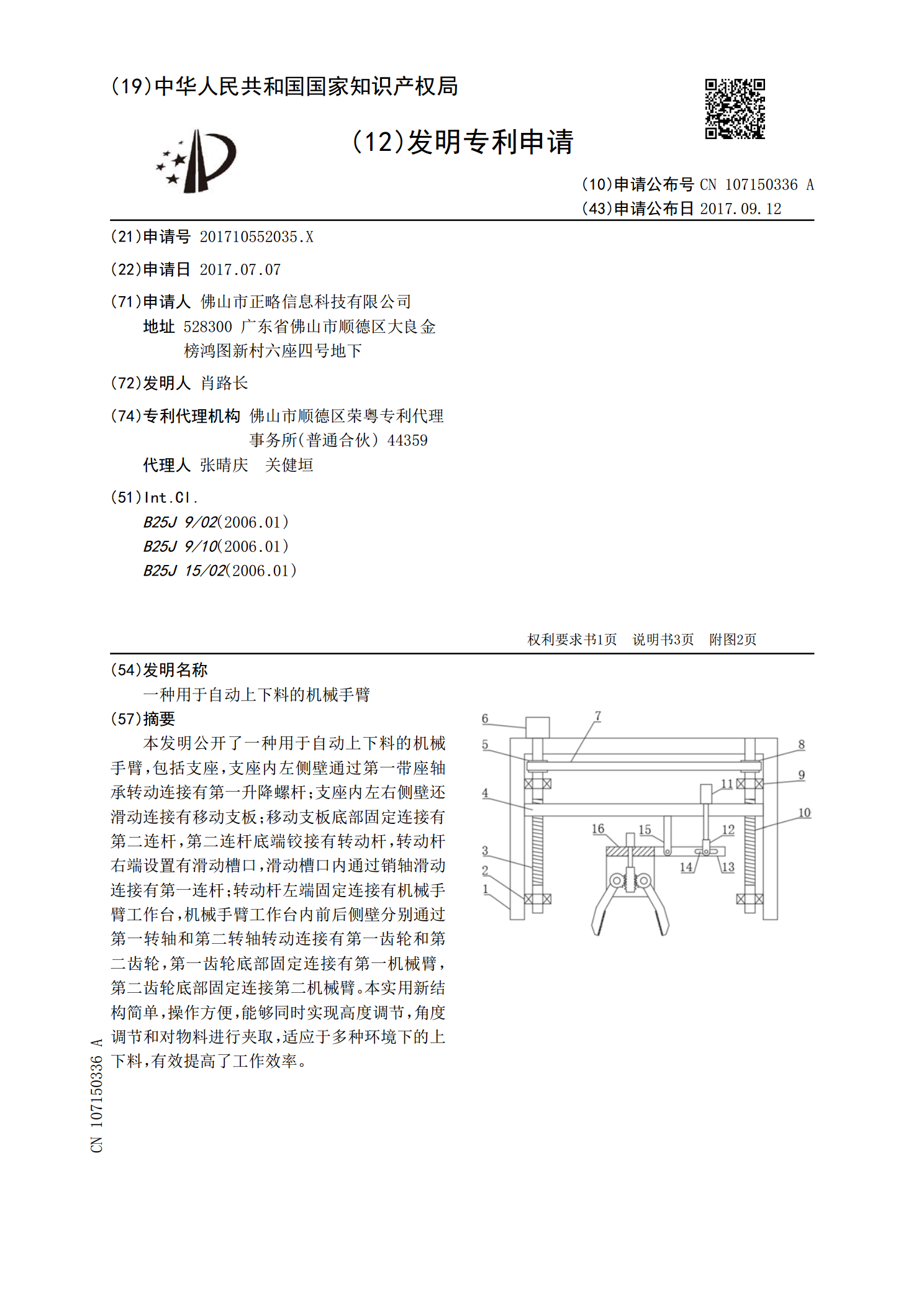
一种用于自动上下料的机械手臂.pdf
本发明公开了一种用于自动上下料的机械手臂,包括支座,支座内左侧壁通过第一带座轴承转动连接有第一升降螺杆;支座内左右侧壁还滑动连接有移动支板;移动支板底部固定连接有第二连杆,第二连杆底端铰接有转动杆,转动杆右端设置有滑动槽口,滑动槽口内通过销轴滑动连接有第一连杆;转动杆左端固定连接有机械手臂工作台,机械手臂工作台内前后侧壁分别通过第一转轴和第二转轴转动连接有第一齿轮和第二齿轮,第一齿轮底部固定连接有第一机械臂,第二齿轮底部固定连接第二机械臂。本实用新结构简单,操作方便,能够同时实现高度调节,角度调节和对物料
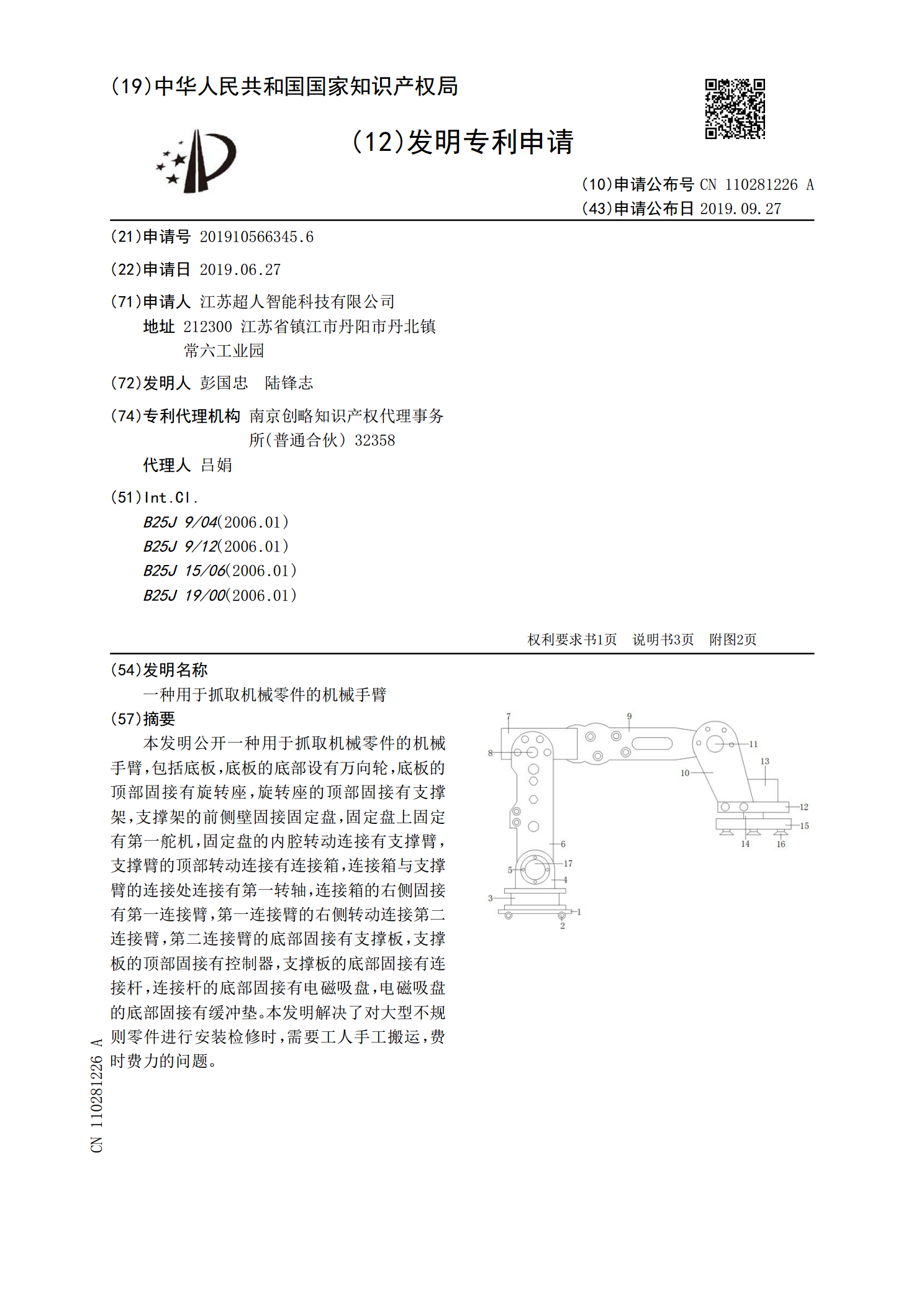
一种用于抓取机械零件的机械手臂.pdf
本发明公开一种用于抓取机械零件的机械手臂,包括底板,底板的底部设有万向轮,底板的顶部固接有旋转座,旋转座的顶部固接有支撑架,支撑架的前侧壁固接固定盘,固定盘上固定有第一舵机,固定盘的内腔转动连接有支撑臂,支撑臂的顶部转动连接有连接箱,连接箱与支撑臂的连接处连接有第一转轴,连接箱的右侧固接有第一连接臂,第一连接臂的右侧转动连接第二连接臂,第二连接臂的底部固接有支撑板,支撑板的顶部固接有控制器,支撑板的底部固接有连接杆,连接杆的底部固接有电磁吸盘,电磁吸盘的底部固接有缓冲垫。本发明解决了对大型不规则零件进行安

一种机械零件抓取机械手臂.pdf
本发明公开了一种机械零件抓取机械手臂,包括固定筒、机械夹、连接器、支柱、底座、变速杆、主动转轮、控制面板和显示器,所述固定筒内设置有固定滑筒,所述移动转轴上设置有螺纹,所述第一电动机上设置有驱动轮,所述驱动齿轮与从动齿轮相连接,所述机械夹内设置有红外测距传感器,所述连接器下端设置有支柱,所述变速杆与主动转轮相连接,所述配电柜的右端设置有信号传输器。该机械零件抓取机械手臂,结合现在使用的机械零件抓取机械手臂进行创新设计,本机械零件抓取机械手臂设置有红外测距传感器,使得装置能够很精确地定位机械零件很好的避免误
一种机械零件抓取机械手臂.pdf
本发明公开了一种机械零件抓取机械手臂,包括固定筒、机械夹、连接器、支柱、底座、变速杆、主动转轮、控制面板和显示器,所述固定筒内设置有固定滑筒,所述移动转轴上设置有螺纹,所述第一电动机上设置有驱动轮,所述驱动齿轮与从动齿轮相连接,所述机械夹内设置有红外测距传感器,所述连接器下端设置有支柱,所述变速杆与主动转轮相连接,所述配电柜的右端设置有信号传输器。该机械零件抓取机械手臂,结合现在使用的机械零件抓取机械手臂进行创新设计,本机械零件抓取机械手臂设置有红外测距传感器,使得装置能够很精确地定位机械零件很好的避免误