
一种基于激光引导双轮差速AGV的原地偏航旋转方法.pdf

小琛****82


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光引导双轮差速AGV的原地偏航旋转方法.pdf
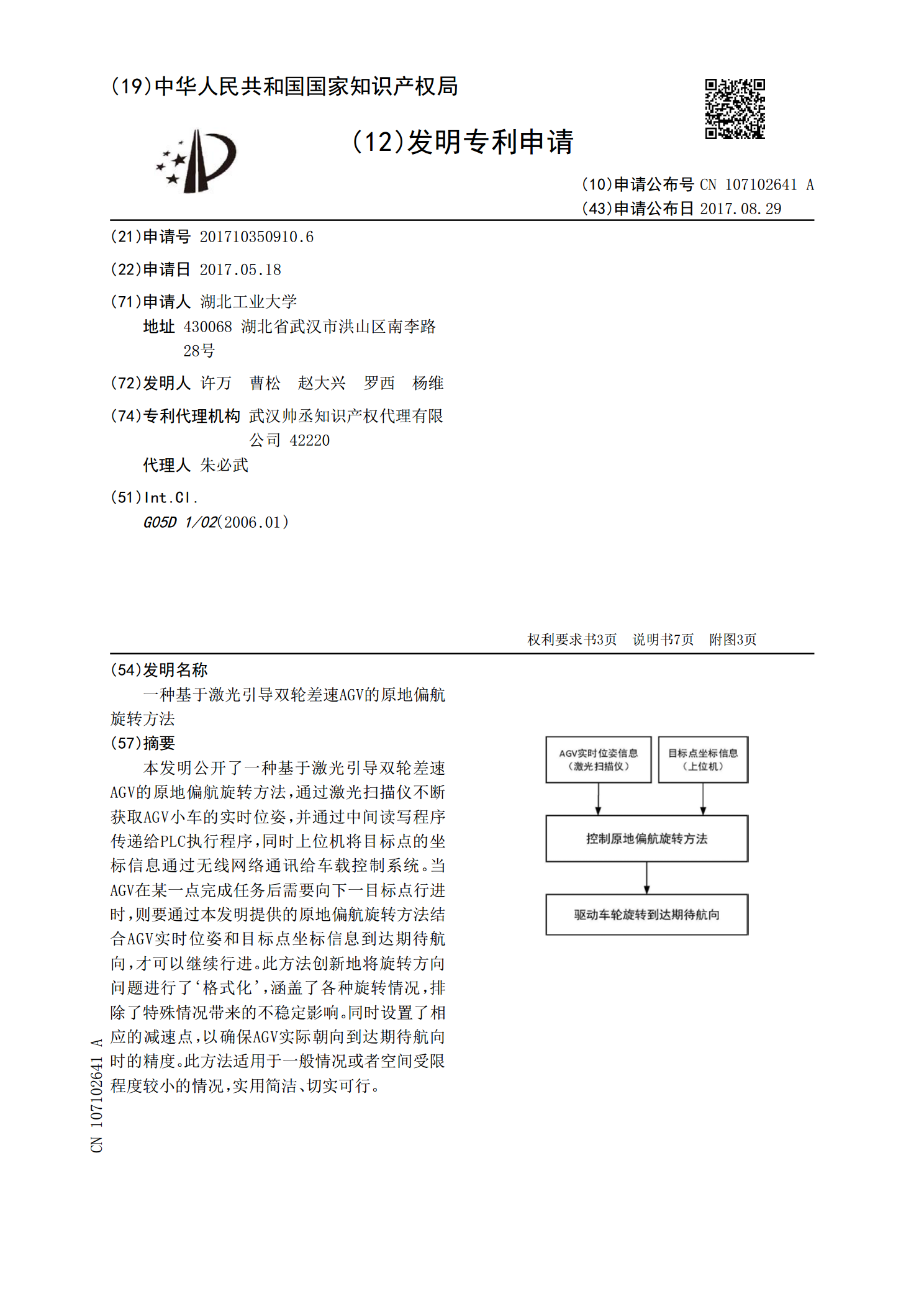
本发明公开了一种基于激光引导双轮差速AGV的原地偏航旋转方法,通过激光扫描仪不断获取AGV小车的实时位姿,并通过中间读写程序传递给PLC执行程序,同时上位机将目标点的坐标信息通过无线网络通讯给车载控制系统。当AGV在某一点完成任务后需要向下一目标点行进时,则要通过本发明提供的原地偏航旋转方法结合AGV实时位姿和目标点坐标信息到达期待航向,才可以继续行进。此方法创新地将旋转方向问题进行了‘格式化’,涵盖了各种旋转情况,排除了特殊情况带来的不稳定影响。同时设置了相应的减速点,以确保AGV实际朝向到达期待航向时
一种多轮差速转向AGV的原地旋转控制方法.pdf
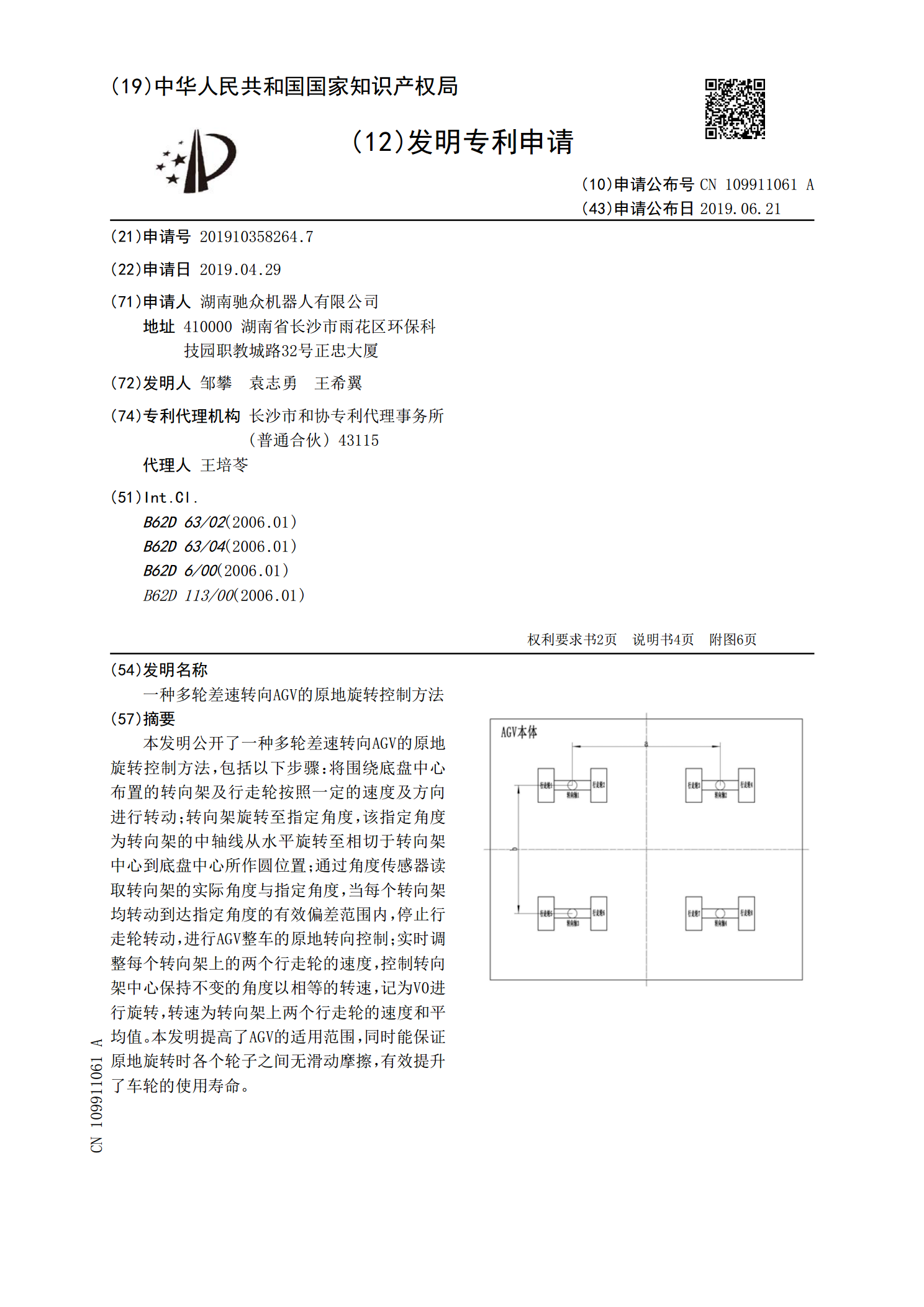
本发明公开了一种多轮差速转向AGV的原地旋转控制方法,包括以下步骤:将围绕底盘中心布置的转向架及行走轮按照一定的速度及方向进行转动;转向架旋转至指定角度,该指定角度为转向架的中轴线从水平旋转至相切于转向架中心到底盘中心所作圆位置;通过角度传感器读取转向架的实际角度与指定角度,当每个转向架均转动到达指定角度的有效偏差范围内,停止行走轮转动,进行AGV整车的原地转向控制;实时调整每个转向架上的两个行走轮的速度,控制转向架中心保持不变的角度以相等的转速,记为V0进行旋转,转速为转向架上两个行走轮的速度和平均值。
支撑轮均采用双轮差速驱动装置的AGV底盘架.pdf
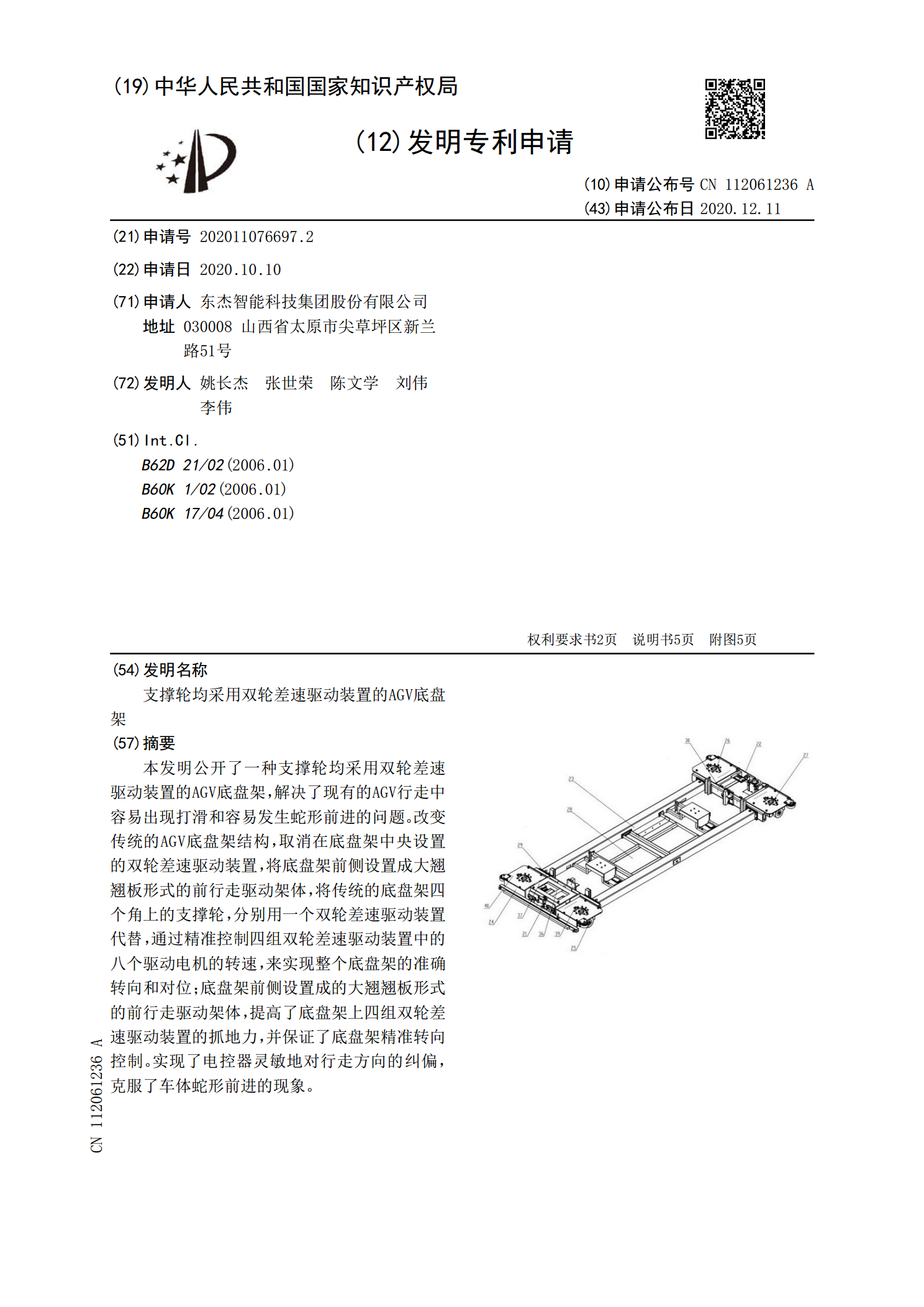
本发明公开了一种支撑轮均采用双轮差速驱动装置的AGV底盘架,解决了现有的AGV行走中容易出现打滑和容易发生蛇形前进的问题。改变传统的AGV底盘架结构,取消在底盘架中央设置的双轮差速驱动装置,将底盘架前侧设置成大翘翘板形式的前行走驱动架体,将传统的底盘架四个角上的支撑轮,分别用一个双轮差速驱动装置代替,通过精准控制四组双轮差速驱动装置中的八个驱动电机的转速,来实现整个底盘架的准确转向和对位;底盘架前侧设置成的大翘翘板形式的前行走驱动架体,提高了底盘架上四组双轮差速驱动装置的抓地力,并保证了底盘架精准转向控制

基于GNSS/ODO的机器人双轮差速定位方法.pdf
本发明属于机器人技术领域,特别涉及一种机器人定位方法。基于GNSS/ODO的机器人双轮差速定位方法,步骤为:A.初始化机器人,利用GNSS获取初始时刻机器人的位姿信息;B.利用双轮里程计定位算法对机器人n+1时刻的全局位姿信息进行推算;C.判断当前时刻是否为设定的GNSS数据修正时刻,如果是,则执行D步骤;如果不是,则执行E步骤;D.根据步骤B中推算得到的n+1时刻的无人车位姿状态,进行卡尔曼滤波“预测‑修正”;E.仅进行D步骤中的卡尔曼滤波预测,而不做修正;F.输出滤波后的机器人的全局位姿信息。利用本发

双轮驱动系统差速控制方法及系统.pdf
本发明公开了一种双轮驱动系统差速控制方法及系统,其中方法包括以下步骤:采集踏板输入指令,并根据踏板输入指令计算输入转矩指令;根据速度传感器反馈的转速信号计算车体前进标志位;根据输入转矩指令、标志位以及反馈的实际转矩,计算转矩给定参考值;根据转矩给定参考值计算判断标志;根据判断标识计算转矩增量,以增加或者减小驱动扭矩;根据转矩增量计算转矩给定计算值,并根据该转矩给定计算值和驱动力矩限制,确定转矩给定目标值;将转矩给定目标值输出给电机及其控制器,以驱动相应的驱动轮。本发明可使车体在各种工况下,无需转向信号,就