
双轮驱动系统差速控制方法及系统.pdf

悠柔****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双轮驱动系统差速控制方法及系统.pdf
本发明公开了一种双轮驱动系统差速控制方法及系统,其中方法包括以下步骤:采集踏板输入指令,并根据踏板输入指令计算输入转矩指令;根据速度传感器反馈的转速信号计算车体前进标志位;根据输入转矩指令、标志位以及反馈的实际转矩,计算转矩给定参考值;根据转矩给定参考值计算判断标志;根据判断标识计算转矩增量,以增加或者减小驱动扭矩;根据转矩增量计算转矩给定计算值,并根据该转矩给定计算值和驱动力矩限制,确定转矩给定目标值;将转矩给定目标值输出给电机及其控制器,以驱动相应的驱动轮。本发明可使车体在各种工况下,无需转向信号,就
双轮差速驱动轮.pdf
本发明双轮差速驱动轮,包括电机及支架组件、对称设置于电机及支架组件两侧的且均与电机及支架组件配合使用的单侧驱动轮组件和单侧随动轮组件,电机及支架组件连接有减速箱组件,减速箱组件与单侧驱动轮组件相对应相配合使用。本发明在电机及支架组件两侧分别安装一个单侧驱动轮和单侧随动轮,使得驱动轮有两个轮子同时承受载荷,提高了驱动轮的承载能力;单侧驱动轮和单侧随动轮位于驱动轮转盘组件中心两侧,在转向时两轮可通过差速旋转,把单轮转向时与地面的滑动摩擦改进为双轮与地面的滚动摩擦,减小轮胎磨损,降低转向电机所需功率。
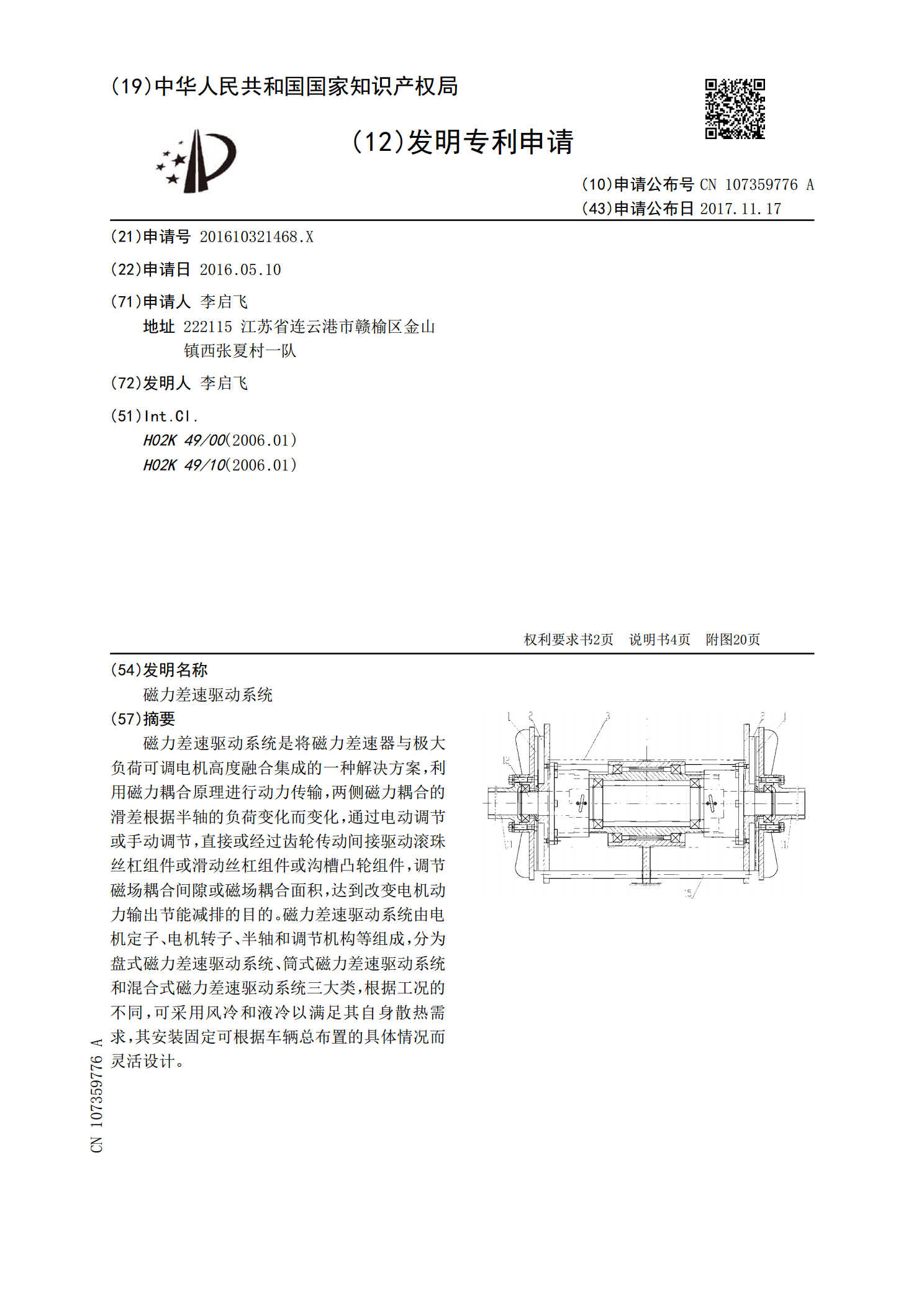
磁力差速驱动系统.pdf
磁力差速驱动系统是将磁力差速器与极大负荷可调电机高度融合集成的一种解决方案,利用磁力耦合原理进行动力传输,两侧磁力耦合的滑差根据半轴的负荷变化而变化,通过电动调节或手动调节,直接或经过齿轮传动间接驱动滚珠丝杠组件或滑动丝杠组件或沟槽凸轮组件,调节磁场耦合间隙或磁场耦合面积,达到改变电机动力输出节能减排的目的。磁力差速驱动系统由电机定子、电机转子、半轴和调节机构等组成,分为盘式磁力差速驱动系统、筒式磁力差速驱动系统和混合式磁力差速驱动系统三大类,根据工况的不同,可采用风冷和液冷以满足其自身散热需求,其安装固

差速驱动式AGV控制系统及自动循迹方法.pdf
为了对差速驱动式AGV建立一个完整的控制系统,以实现AGV对路径的可靠跟踪,本发明提供了一种差速驱动式AGV控制系统及自动循迹方法,其中系统包括轨迹检测装置和控制器;控制器包括数据处理模块、数据收发模块和控制模块;数据处理模块包括左右轮差速比获取模块和左右轮速度获取模块;轨迹检测装置的输入端与AGV的驱动部件相连,输出端与所述左右轮差速比获取模块的输入端相连;左右轮差速比获取模块的输出端和数据收发模块的输出端均与所述左右轮速度获取模块的输入端相连;左右轮速度获取模块的输出端与所述控制模块的输入端相连;控制
双轮差速转向驱动轮.pdf
本发明双轮差速转向驱动轮,包括双轮差速驱动轮和与双轮差速驱动轮对应设置且相配合使用的驱动轮转盘组件;双轮差速驱动轮包括电机及支架组件、对称设置于电机及支架组件两侧的且均与电机及支架组件配合使用的单侧驱动轮组件和单侧随动轮组件,电机及支架组件连接有减速箱组件,减速箱组件与单侧驱动轮组件相对应相配合使用。本发明在电机及支架组件两侧分别安装一个单侧驱动轮和单侧随动轮,使得驱动轮有两个轮子同时承受载荷,提高了驱动轮的承载能力;单侧驱动轮和单侧随动轮位于驱动轮转盘组件中心两侧,在转向时两轮可通过差速旋转,把单轮转向