
一种多轮差速转向AGV的原地旋转控制方法.pdf

睿德****找我


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多轮差速转向AGV的原地旋转控制方法.pdf
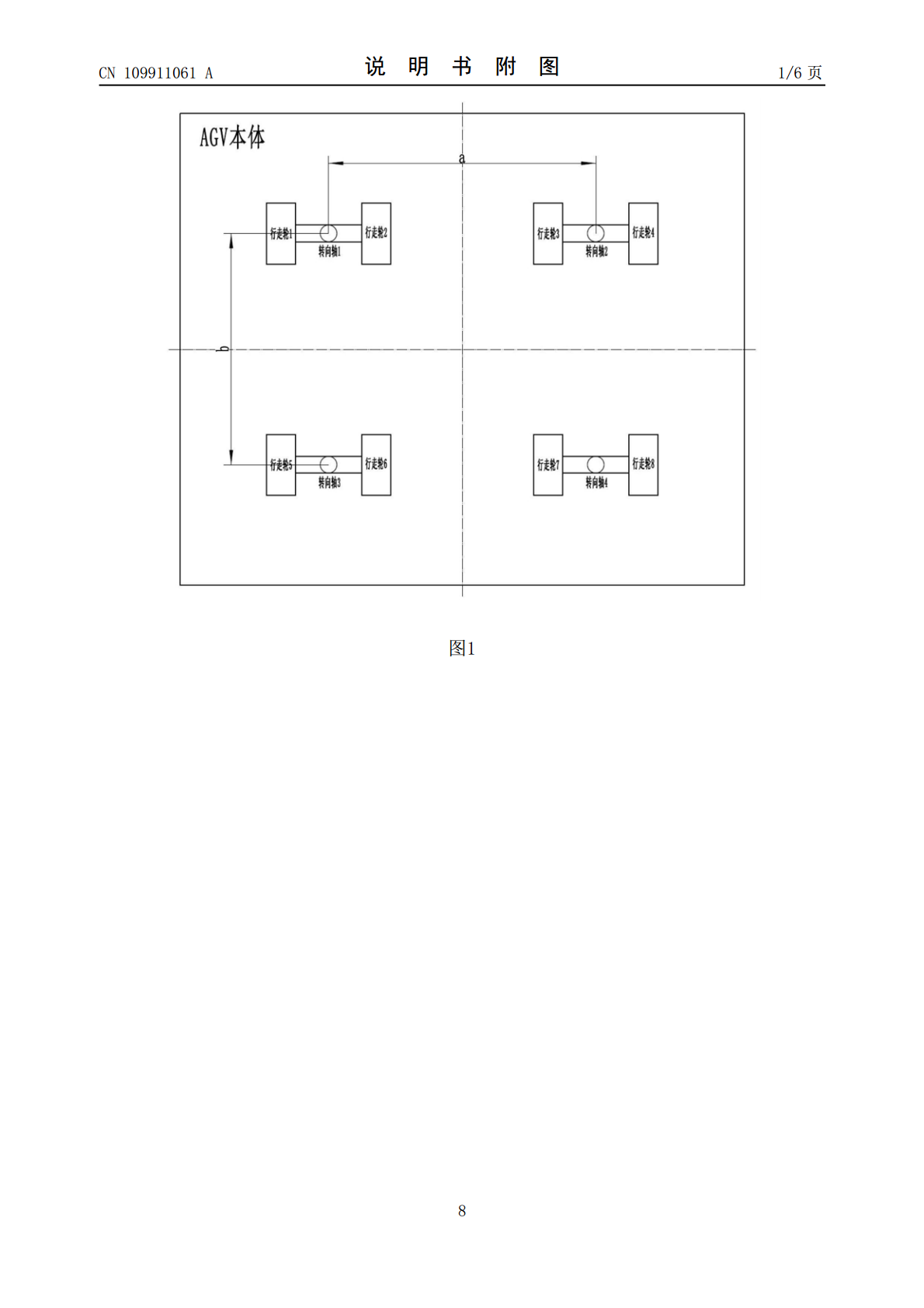
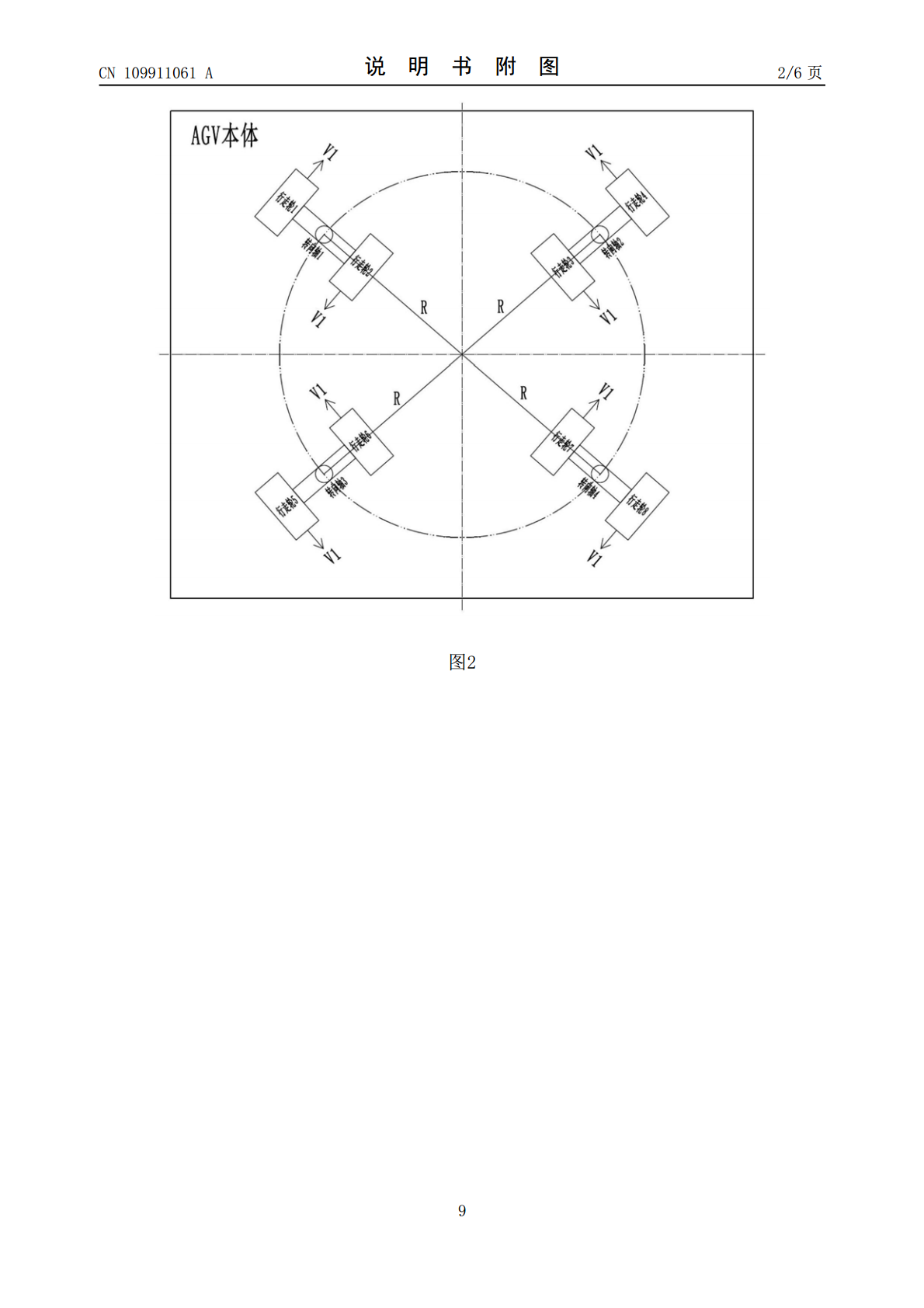
本发明公开了一种多轮差速转向AGV的原地旋转控制方法,包括以下步骤:将围绕底盘中心布置的转向架及行走轮按照一定的速度及方向进行转动;转向架旋转至指定角度,该指定角度为转向架的中轴线从水平旋转至相切于转向架中心到底盘中心所作圆位置;通过角度传感器读取转向架的实际角度与指定角度,当每个转向架均转动到达指定角度的有效偏差范围内,停止行走轮转动,进行AGV整车的原地转向控制;实时调整每个转向架上的两个行走轮的速度,控制转向架中心保持不变的角度以相等的转速,记为V0进行旋转,转速为转向架上两个行走轮的速度和平均值。

视觉AGV差速转向控制方法研究.docx
视觉AGV差速转向控制方法研究随着工业自动化的发展,自动导航车(AGV)在工厂内扮演着越来越重要的角色。AGV是一种自动运输车辆,通常用于在工厂内从一个地方到另一个地方运送物品。视觉AGV是一种AGV,它利用机器视觉技术实现自动导航。本文将讨论视觉AGV差速转向控制方法研究。首先,我们先了解一下什么是AGV的差速转向控制。差速转向是一种AGV转向技术,它利用两辆车轮的不同速度来改变车辆的方向。例如,如果左侧的车轮转速较慢,而右侧的车轮转速较快,车辆将向左转。差速转向控制是一种基于此原理的控制技术,用于控制
一种基于激光引导双轮差速AGV的原地偏航旋转方法.pdf
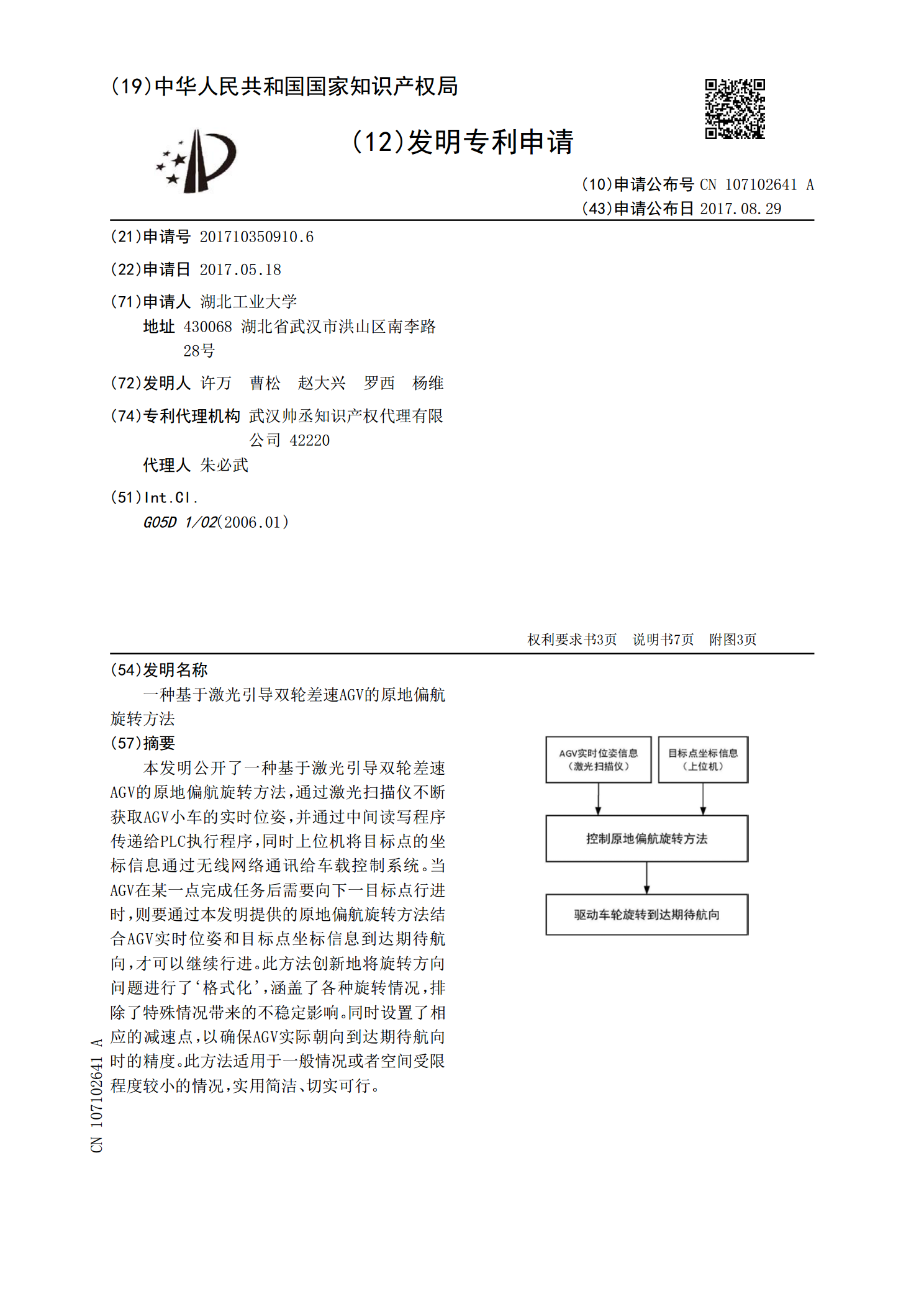
本发明公开了一种基于激光引导双轮差速AGV的原地偏航旋转方法,通过激光扫描仪不断获取AGV小车的实时位姿,并通过中间读写程序传递给PLC执行程序,同时上位机将目标点的坐标信息通过无线网络通讯给车载控制系统。当AGV在某一点完成任务后需要向下一目标点行进时,则要通过本发明提供的原地偏航旋转方法结合AGV实时位姿和目标点坐标信息到达期待航向,才可以继续行进。此方法创新地将旋转方向问题进行了‘格式化’,涵盖了各种旋转情况,排除了特殊情况带来的不稳定影响。同时设置了相应的减速点,以确保AGV实际朝向到达期待航向时
一种AGV四轮独立转向与差速结合的控制机构.pdf
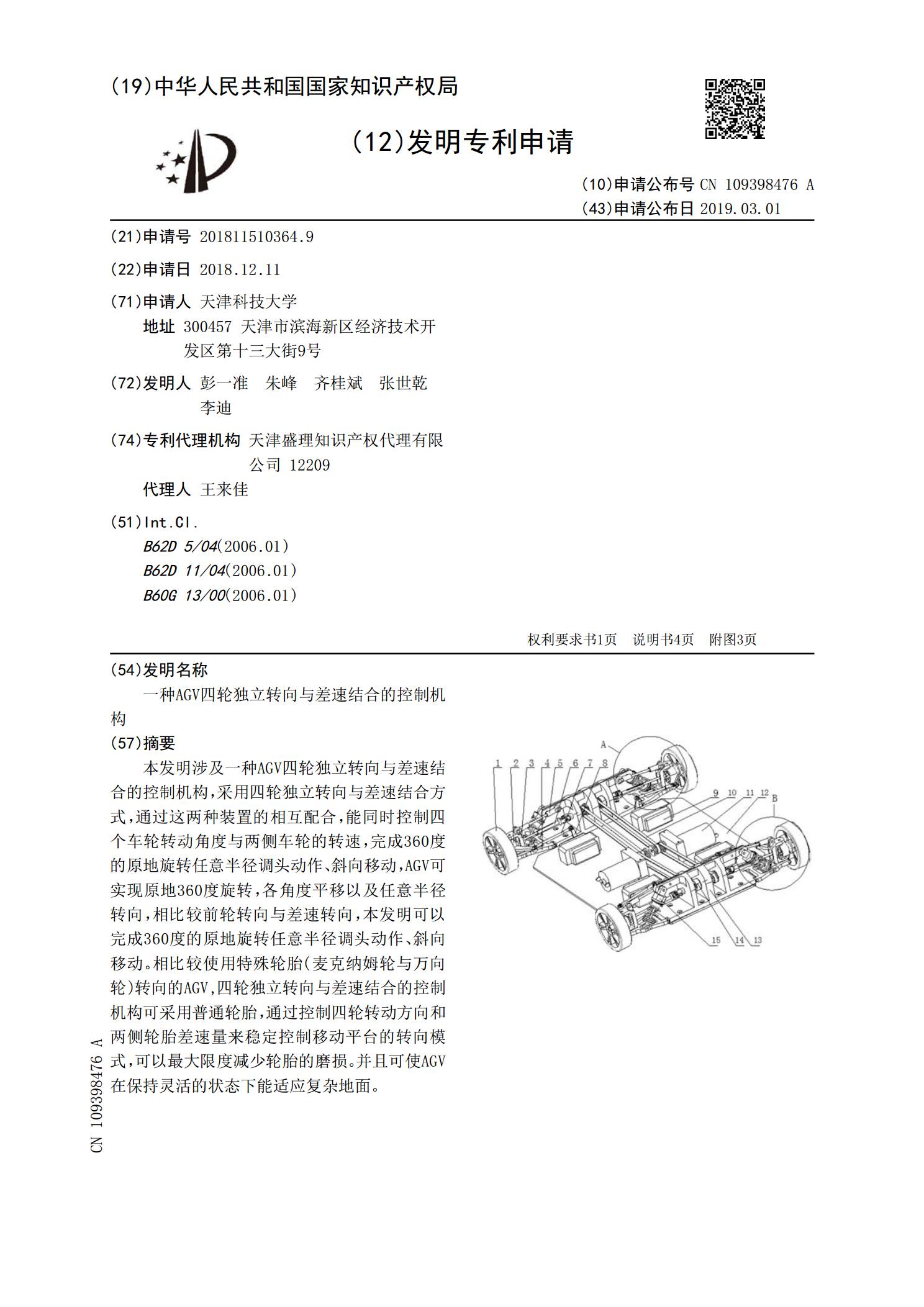
本发明涉及一种AGV四轮独立转向与差速结合的控制机构,采用四轮独立转向与差速结合方式,通过这两种装置的相互配合,能同时控制四个车轮转动角度与两侧车轮的转速,完成360度的原地旋转任意半径调头动作、斜向移动,AGV可实现原地360度旋转,各角度平移以及任意半径转向,相比较前轮转向与差速转向,本发明可以完成360度的原地旋转任意半径调头动作、斜向移动。相比较使用特殊轮胎(麦克纳姆轮与万向轮)转向的AGV,四轮独立转向与差速结合的控制机构可采用普通轮胎,通过控制四轮转动方向和两侧轮胎差速量来稳定控制移动平台的转

一种AGV自调平差速转向机构.pdf
本发明涉及一种自调平差速转向机构,应用于全方位自动导引运输车AGV的核心驱动部分,也可应用于其他相似运输车驱动部分。本机构主要由底盘固定轴,滚动轴承,回转平台,滑动回转轴承,中心转轴,中心调平块,减速电机,限位回转轴承,弹簧固定板,弹簧支架,弹簧,弹簧上芯杆,弹簧下芯杆,驱动轮组成。在AGV行驶过程中遇到地面有凹凸不平整情况,差速转向机构具有自动调整功能,通过四个弹簧的拉伸和压缩来吸收不平整路面的变化波动。