
一种用于自动上下料的机械手臂.pdf

小琛****82


1/7

2/7
3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于自动上下料的机械手臂.pdf
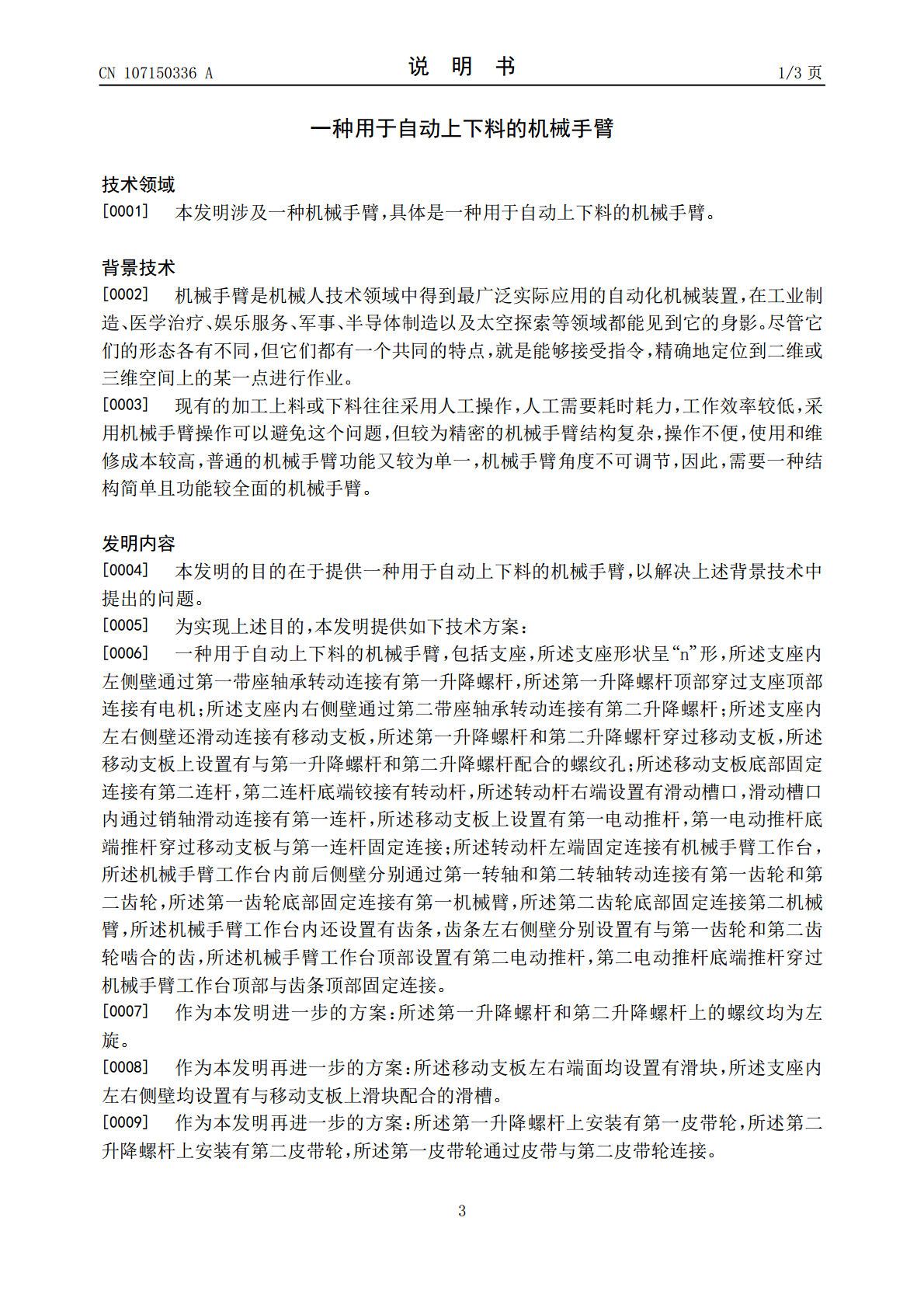
本发明公开了一种用于自动上下料的机械手臂,包括支座,支座内左侧壁通过第一带座轴承转动连接有第一升降螺杆;支座内左右侧壁还滑动连接有移动支板;移动支板底部固定连接有第二连杆,第二连杆底端铰接有转动杆,转动杆右端设置有滑动槽口,滑动槽口内通过销轴滑动连接有第一连杆;转动杆左端固定连接有机械手臂工作台,机械手臂工作台内前后侧壁分别通过第一转轴和第二转轴转动连接有第一齿轮和第二齿轮,第一齿轮底部固定连接有第一机械臂,第二齿轮底部固定连接第二机械臂。本实用新结构简单,操作方便,能够同时实现高度调节,角度调节和对物料
一种用于上下料抓取的机械手臂.pdf
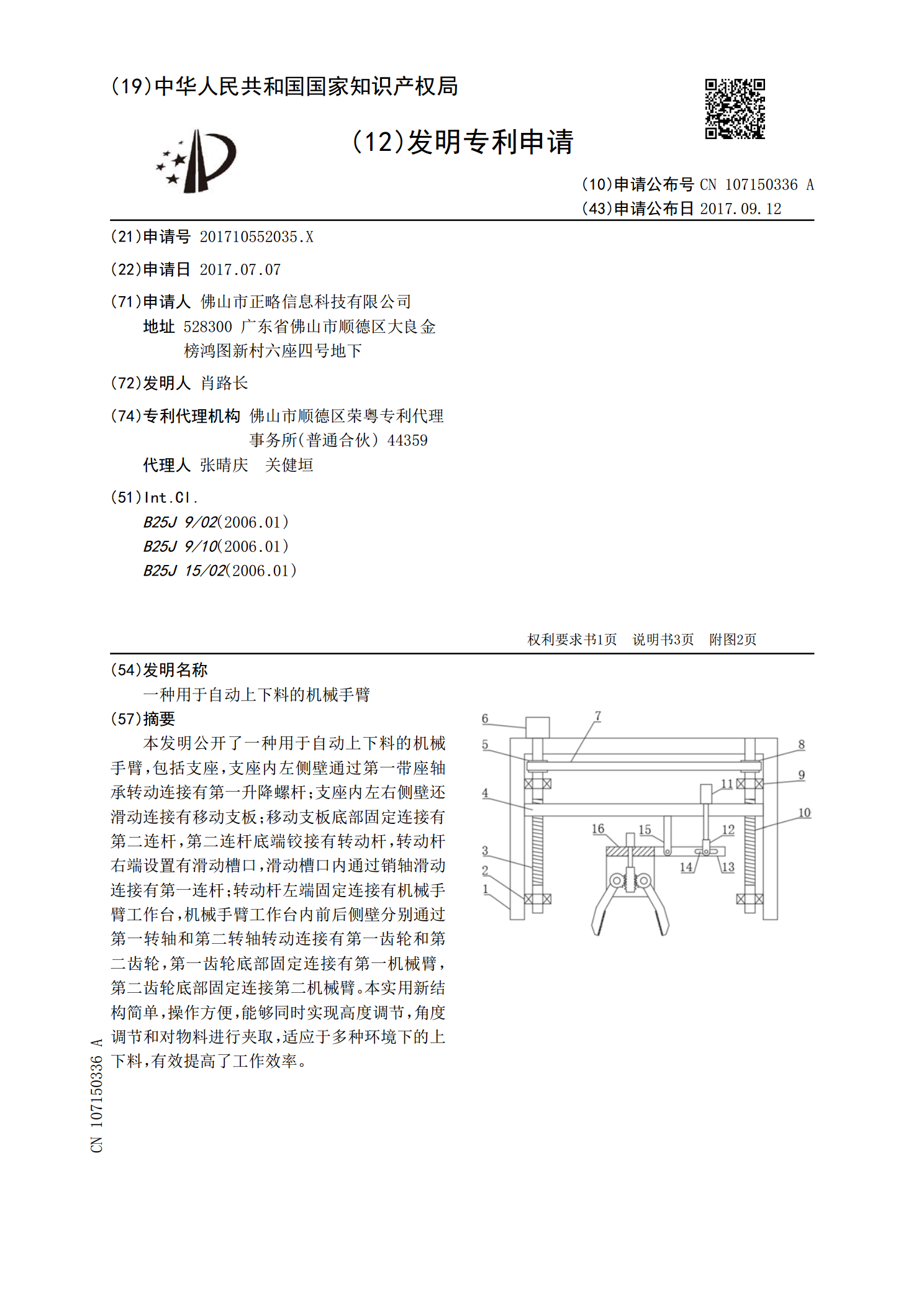
本发明公开一种用于上下料抓取的机械手臂,包括底座,底座的顶部固接有转动底座,转动底座的顶部转动连接有支撑板,支撑板的顶部固接有支撑架,支撑架的前侧壁固接有第一舵机,支撑架的后侧转动连接有支撑臂,支撑臂的上端转动连接有三角连接件,三角连接件与支撑臂的连接处插接有第一转轴,三角连接件的右侧与支撑架的右侧上端之间连接有第一连接杆,第一转轴的后侧连接有连接盘,连接架的底部固接有固定杆,固定杆的底部固接有固定板,固定板的顶部设置有第二舵机,固定板的底部连接有机械爪。本发明解决了锻压行业均以人工来上下料为主,而现有的
一种用于圆把手的自动转运机械手臂.pdf
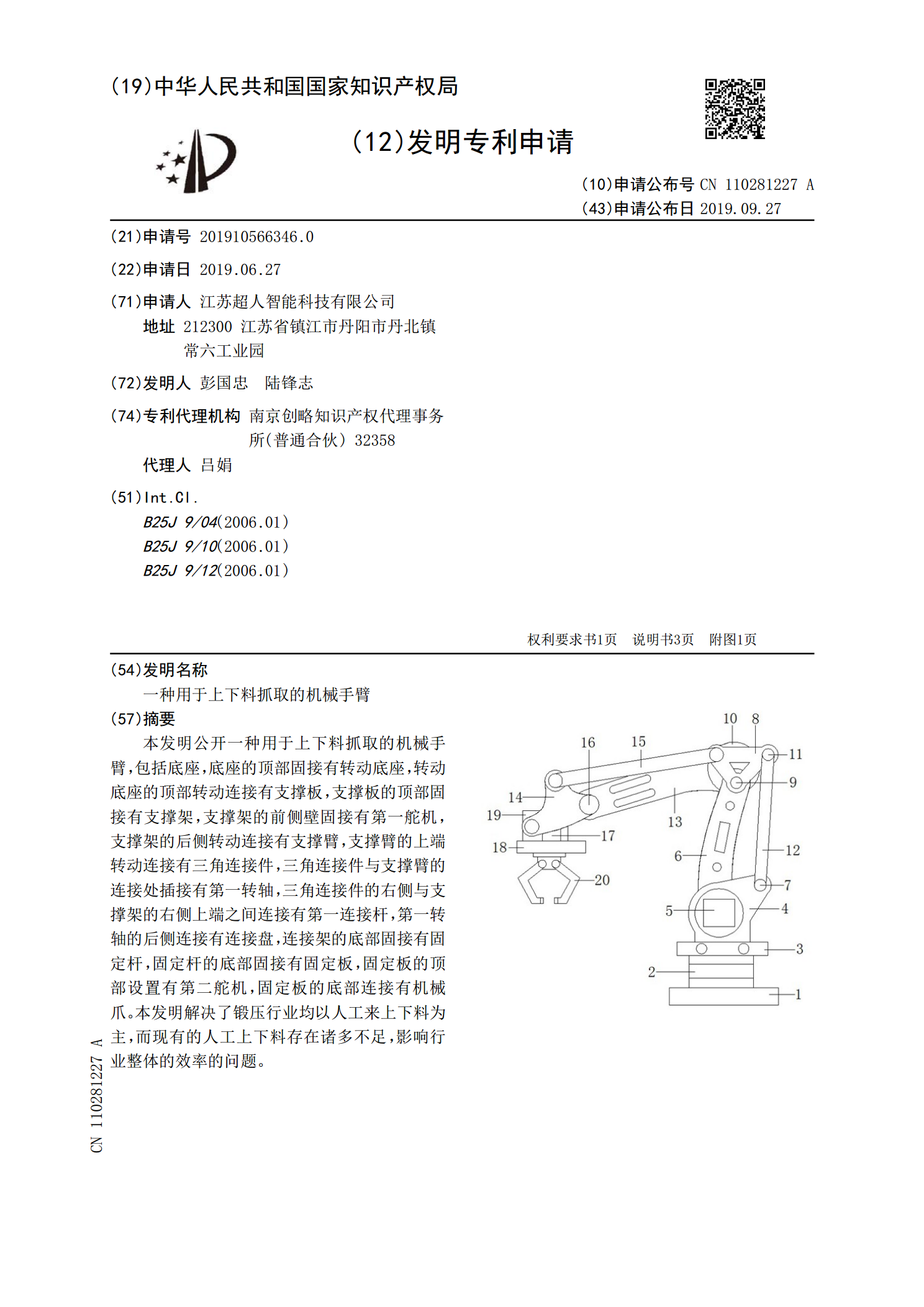
本发明公开了一种用于圆把手的自动转运机械手臂,包括机械手夹持臂,其特征在于:机械手夹持臂包括方向驱动件和四个支臂;方向驱动件包括左右水平往复驱动件、上下往复驱动件、前后水平往复驱动件;支臂包括支臂杆和夹持部,支臂杆在水平面上垂直连接于支臂梁上,夹持部包括一对夹持杆,夹持部通过开合驱动件进行周期性开合。与现有技术相比,本发明的有益效果是:用方向驱动件带动四个支臂在冲床上往返转运圆把手,既提高了生产效率,又提高了产品质量的稳定性和工人生产的安全性。

一种基于机械手臂的上下料设备.pdf
本申请涉及一种基于机械手臂的上下料设备,具有四个呈十字形布置的抓取机构,使四个抓取机构中能够同时抓取两个待检测的电子产品,同时另外两个抓取机构用于抓取已检测的电子产品或者将电子产品从一个检测装置搬运到另一个检测装置,四个呈十字形布置的抓取机构能够最大程度地提高工作效率,减少在托盘上料装置和托盘下料装置处的抓取次数。十字形的不等长的布置能够形成有效的避让,避免干涉。

一种用于注塑机自动化作业的机械手臂.pdf
本实用新型公开了一种用于注塑机自动化作业的机械手臂,包括底板,所述底板的上表面固定连接有机械臂,所述底板的底面固定连接有框体,所述框体的内底壁固定连接有相对称的站板,每个所述站板的顶端均与底板的底面固定连接,两个所述站板相互靠近的一侧面共同固定连接有隔板,所述隔板的上表面放置有蓄电池,所述框体的左右两侧面均开设有两组相对称的通孔,所述底板的下方设有连接框。本装置通过设置定位杆和定位槽以及连接框的配合,取代了现有机械臂的连接方式,避免了此类方式容易导致工人对该装置进行拆卸或移动时出现不便的问题,通过设置有电