
两自由度关节结构.pdf

玉怡****文档

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
两自由度关节结构.pdf
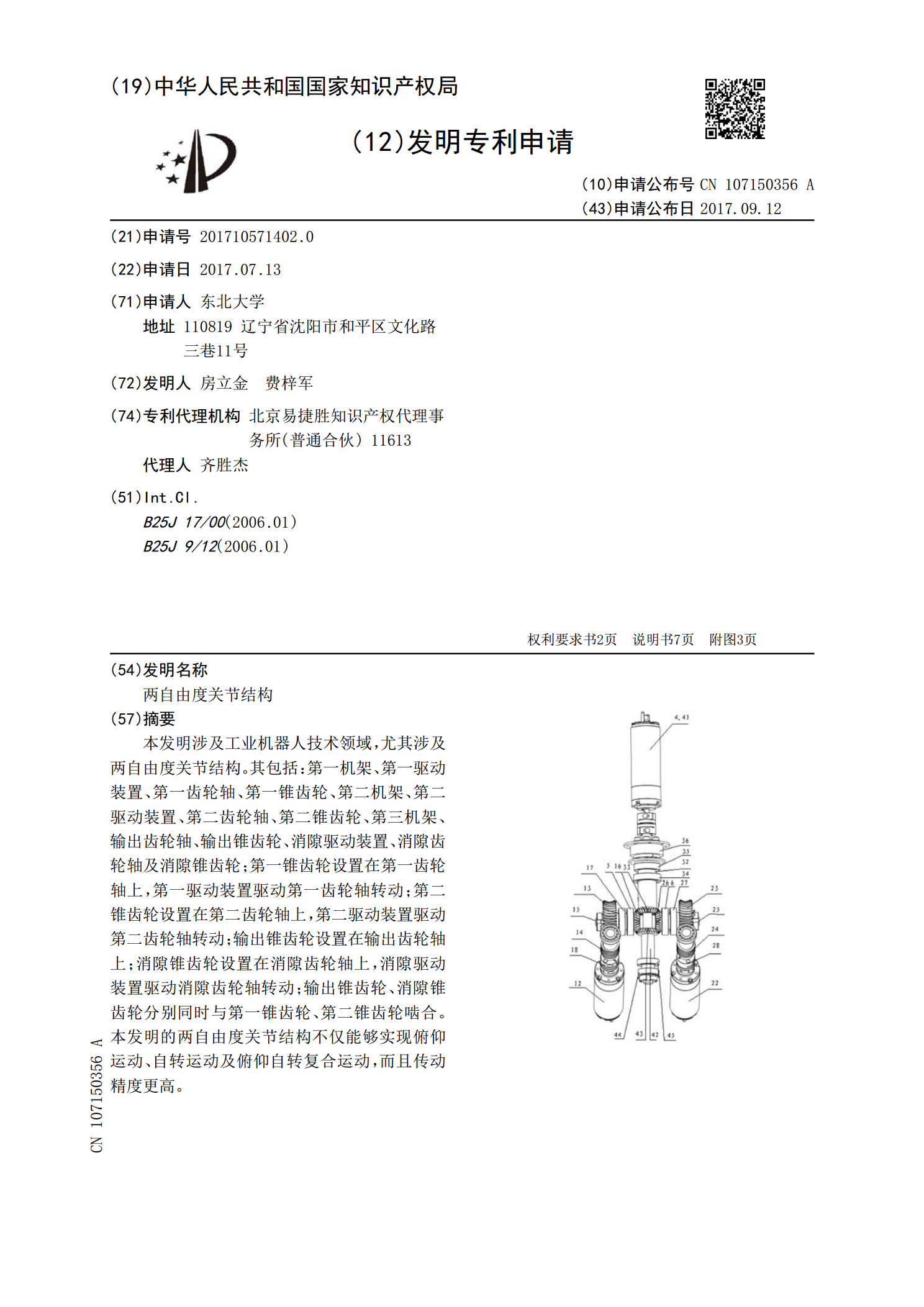
本发明涉及工业机器人技术领域,尤其涉及两自由度关节结构。其包括:第一机架、第一驱动装置、第一齿轮轴、第一锥齿轮、第二机架、第二驱动装置、第二齿轮轴、第二锥齿轮、第三机架、输出齿轮轴、输出锥齿轮、消隙驱动装置、消隙齿轮轴及消隙锥齿轮;第一锥齿轮设置在第一齿轮轴上,第一驱动装置驱动第一齿轮轴转动;第二锥齿轮设置在第二齿轮轴上,第二驱动装置驱动第二齿轮轴转动;输出锥齿轮设置在输出齿轮轴上;消隙锥齿轮设置在消隙齿轮轴上,消隙驱动装置驱动消隙齿轮轴转动;输出锥齿轮、消隙锥齿轮分别同时与第一锥齿轮、第二锥齿轮啮合。本

机器人两自由度关节结构.pdf
本发明提供一种机器人两自由度关节结构,包括第一同步齿形带、第一谐波减速器、小臂、手腕、端盖、第二同步齿形带、轴套、传动轴、锥齿轮、第二谐波减速器。根据本发明所述的机器人两自由度关节结构,结构简化、重量轻,可实现两个方向上的转动操作。

一种两自由度的柔性肘关节.pdf
本发明公开了一种两自由度的柔性肘关节,属于机器人领域。它包括端部设有半球形凹槽的肱骨架、一端设有球形圆头可以绕肱骨架的凹槽相对转动的尺桡骨端、与尺桡骨端同轴线装设的尺桡骨主架、肱尺关节与肱桡关节;尺关节包括肱尺关节轮A、尺关节轮B、肱尺关节电机和肱尺关节弹簧;桡关节包括其输出轴穿过装设于尺桡骨主架内部的滚动轴承A并与锥齿轮A相连的肱桡关节电机,与锥齿轮A啮合传动并装设于尺桡骨端右侧外部上的锥齿轮B。本发明是一种同时具有转动和扭转两个自由度、采用磁性吸附装设、转动中心可以发生微小位移的柔性肘关节。

两个自由度的机械臂关节模块.pdf
两个自由度的机械臂关节模块,它涉及一种机械臂关节模块。本发明的目的是为解决目前现有机械臂关节为单轴组合构成,几个自由度间不同心,控制难度大和连接复杂的问题。第一输出转盘与第一输出转轴传动连接,第一输出转轴固定在第一固定架上,第一随动转盘装在第二侧壁上,第一齿轮与第一输出转轴固接,第一齿轮与第一减速机构的输入端啮合,第一减速机构的输出端与第二齿轮啮合,第一减速机构固装在第一固定架上,第二齿轮装在第一电机的输出轴上;第二输出转盘的传动结构与第一输出转盘相同,第二输出转盘与第一输出转盘垂直设置。本发

一种仿生机器人两自由度柔性颈部关节结构.pdf
本发明公开了一种仿生机器人两自由度柔性颈部关节结构,属于仿生机器人领域。它包括可连接机器人头部的颈部连接件,可连接机器人躯体的躯干连接件,和装设于颈部连接件与躯干连接件之间的、具有头部旋转与前后点头功能的复合颈部关节主体;复合颈部关节主体包括外置曲线管、内置曲线管、磁铁弹簧复合装置、步进电机、主动轴、小齿轮和大齿轮;磁铁弹簧复合装置驱动内置曲线管相对于外置曲线管曲线运动,从而通过颈部屈伸实现前后点头功能。本发明是一种能够用作仿生机器人的颈部关节、更加类人地实现头部转动与前后点头姿态、且颈部可以自由屈伸的柔