
机器人两自由度关节结构.pdf

一吃****新冬

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人两自由度关节结构.pdf
本发明提供一种机器人两自由度关节结构,包括第一同步齿形带、第一谐波减速器、小臂、手腕、端盖、第二同步齿形带、轴套、传动轴、锥齿轮、第二谐波减速器。根据本发明所述的机器人两自由度关节结构,结构简化、重量轻,可实现两个方向上的转动操作。
两自由度关节结构.pdf
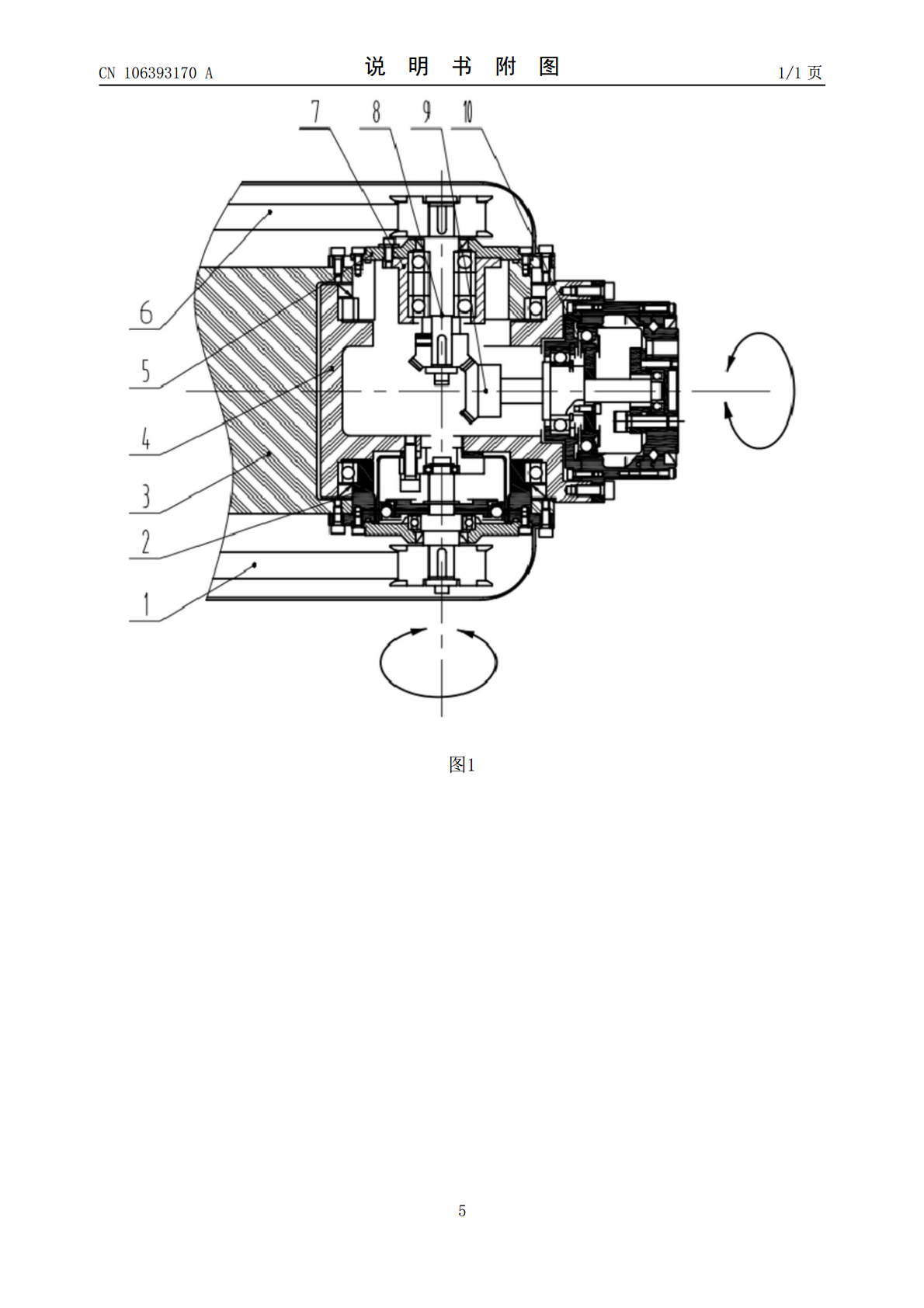
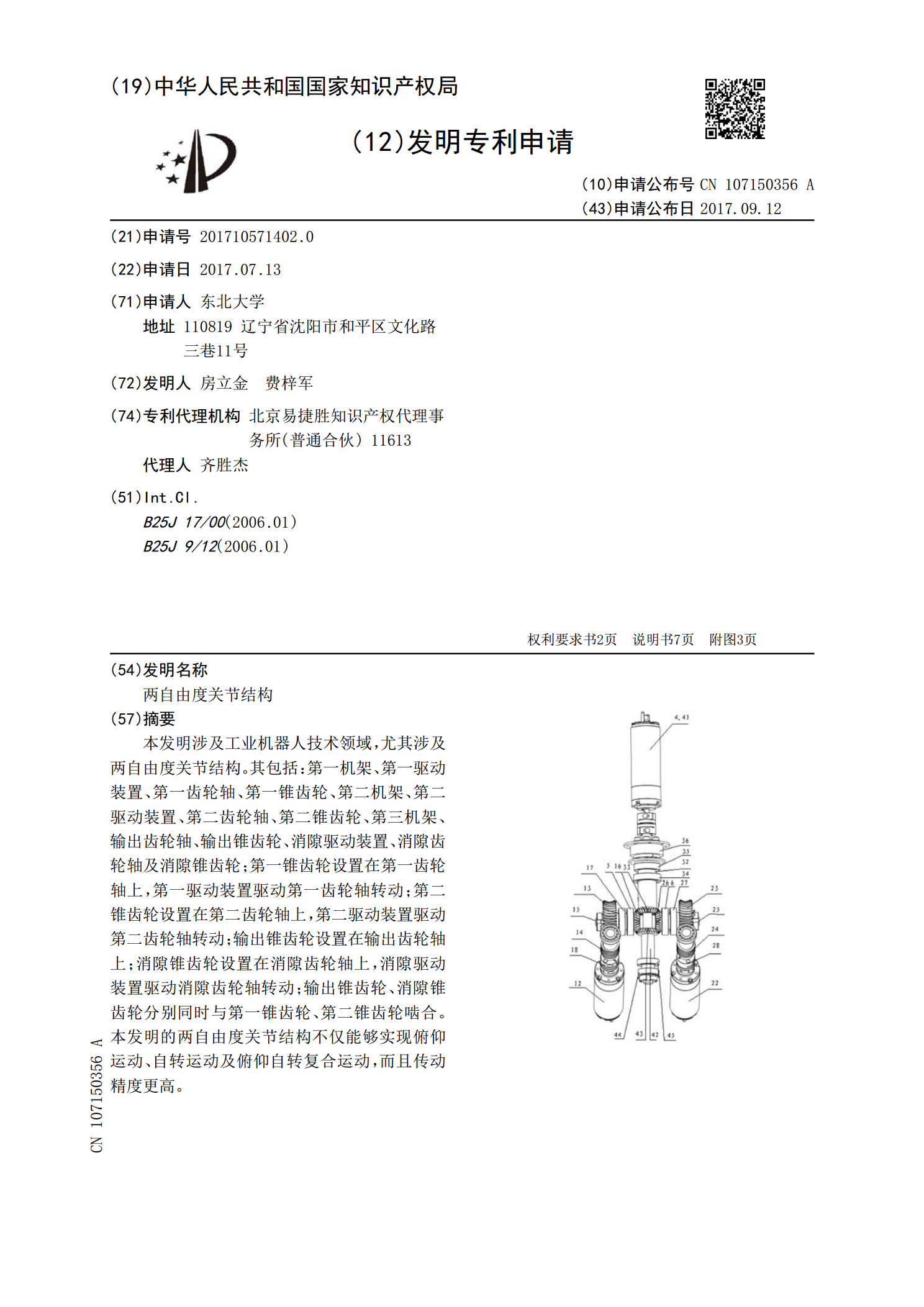
本发明涉及工业机器人技术领域,尤其涉及两自由度关节结构。其包括:第一机架、第一驱动装置、第一齿轮轴、第一锥齿轮、第二机架、第二驱动装置、第二齿轮轴、第二锥齿轮、第三机架、输出齿轮轴、输出锥齿轮、消隙驱动装置、消隙齿轮轴及消隙锥齿轮;第一锥齿轮设置在第一齿轮轴上,第一驱动装置驱动第一齿轮轴转动;第二锥齿轮设置在第二齿轮轴上,第二驱动装置驱动第二齿轮轴转动;输出锥齿轮设置在输出齿轮轴上;消隙锥齿轮设置在消隙齿轮轴上,消隙驱动装置驱动消隙齿轮轴转动;输出锥齿轮、消隙锥齿轮分别同时与第一锥齿轮、第二锥齿轮啮合。本

一种仿生机器人两自由度柔性颈部关节结构.pdf
本发明公开了一种仿生机器人两自由度柔性颈部关节结构,属于仿生机器人领域。它包括可连接机器人头部的颈部连接件,可连接机器人躯体的躯干连接件,和装设于颈部连接件与躯干连接件之间的、具有头部旋转与前后点头功能的复合颈部关节主体;复合颈部关节主体包括外置曲线管、内置曲线管、磁铁弹簧复合装置、步进电机、主动轴、小齿轮和大齿轮;磁铁弹簧复合装置驱动内置曲线管相对于外置曲线管曲线运动,从而通过颈部屈伸实现前后点头功能。本发明是一种能够用作仿生机器人的颈部关节、更加类人地实现头部转动与前后点头姿态、且颈部可以自由屈伸的柔

一种空间机器人的两自由度关节.pdf
本发明公开了一种空间机器人的两自由度关节包括两关节驱动组件、关节传动组件,可以实现关节两自由度运动,通过调节两个电机的转速和转角,可以实现关节俯仰、旋转、两者合成的三种运动方式。关节传动组件是由两个输入锥齿轮和一个输出锥齿轮构成的差动运动机构。两个输入锥齿轮分别与各自对应的准双曲面齿轮固连,输出法兰与输出锥齿轮固连。电机力矩通过与其连接的行星减速器的一级减速,再由准双曲面齿轮进行二级减速,最后通过锥齿轮差动机构将力矩传递到输出端。由于两级减速的减速比很大,使得该机构输出力矩很大,具有很强的负载能力。

一种单轴两自由度机器人关节.pdf
一种单轴两自由度机器人关节,包括第一关节总成和第二关节总成;第一关节总成包括第一驱动电机、行星减速机和第一关节主轴,第一关节主轴与第一驱动电机的转子连接,行星减速机的输入端与第一关节主轴连接;第二关节总成包括第二驱动电机、第二关节主轴和同步齿形带轮,第二驱动电机壳体与行星减速机的输出端连接,第二关节主轴与第二驱动电机的转子连接,同步齿形带轮固定安装于第二关节主轴上。该机器人关节结构紧凑,实现了同轴两自由度,充分利用无框直驱力矩电机输出扭矩大、结构简单紧凑等优点,可用于大载重‑自重比的协作型机器人,也可用于