
一种两自由度的柔性肘关节.pdf

依波****bc

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种两自由度的柔性肘关节.pdf
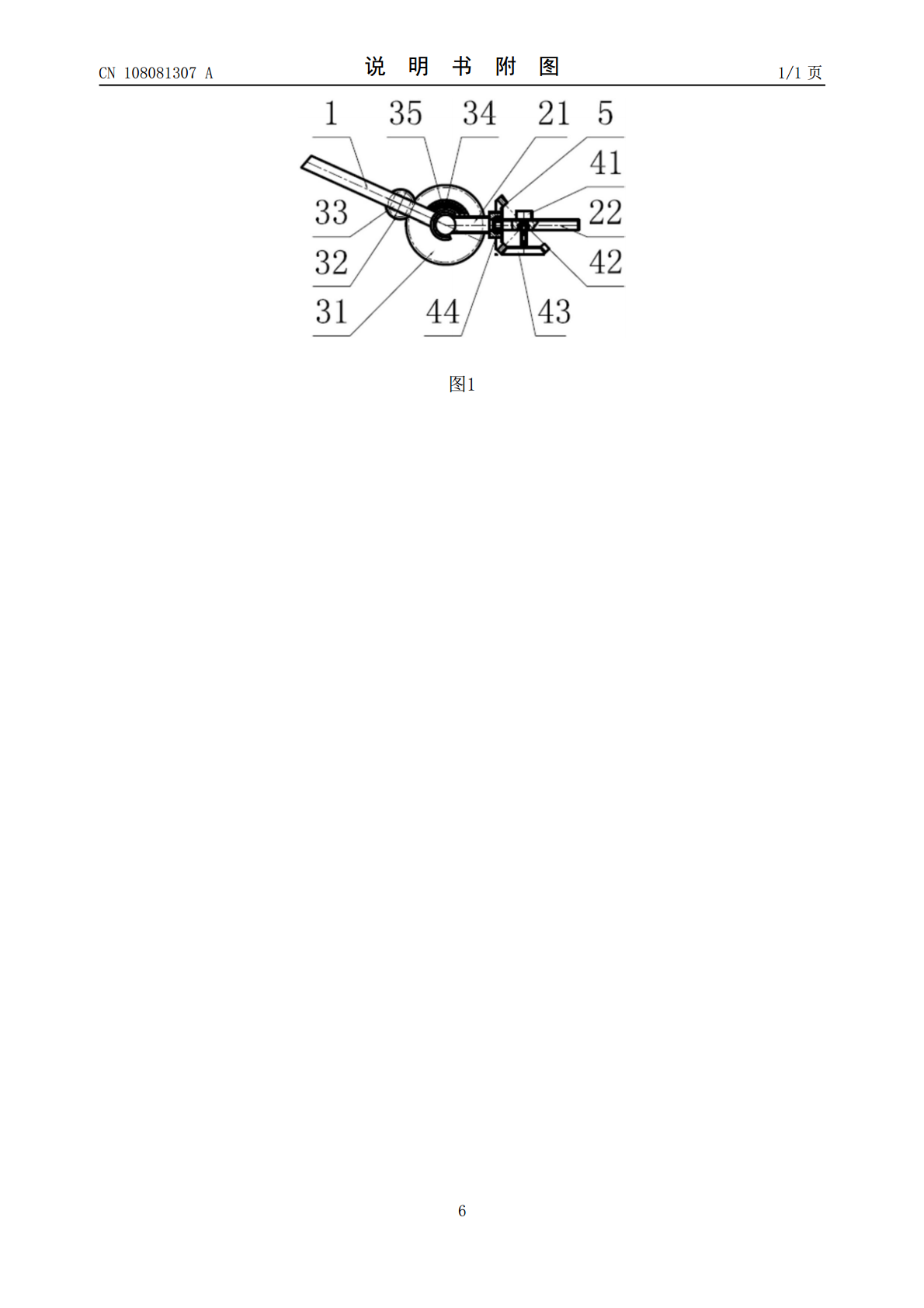
本发明公开了一种两自由度的柔性肘关节,属于机器人领域。它包括端部设有半球形凹槽的肱骨架、一端设有球形圆头可以绕肱骨架的凹槽相对转动的尺桡骨端、与尺桡骨端同轴线装设的尺桡骨主架、肱尺关节与肱桡关节;尺关节包括肱尺关节轮A、尺关节轮B、肱尺关节电机和肱尺关节弹簧;桡关节包括其输出轴穿过装设于尺桡骨主架内部的滚动轴承A并与锥齿轮A相连的肱桡关节电机,与锥齿轮A啮合传动并装设于尺桡骨端右侧外部上的锥齿轮B。本发明是一种同时具有转动和扭转两个自由度、采用磁性吸附装设、转动中心可以发生微小位移的柔性肘关节。

一种两自由度柔性机构的研究.docx
一种两自由度柔性机构的研究摘要:本论文研究了一种具有两自由度的柔性机构的设计和分析。该柔性机构是一种由刚体链接和柔性杆件构成的复杂系统。本研究的主要目的是分析该柔性机构的运动特性和刚度特性,并探讨其应用于机器人和其他工程领域的潜在应用。本文介绍了该柔性机构的设计原理、分析方法和实验结果,并通过仿真验证了该柔性机构的合理性和有效性。一、引言柔性机构是一种新型的机构,众多研究表明它具有很多优点,比如结构简单,自重轻,可调整程度高,可以适应多种工况等。其中,两自由度柔性机构是一种兼顾了运动自由度和机构刚度的设计
一种两自由度柔性并联微操作器.pdf
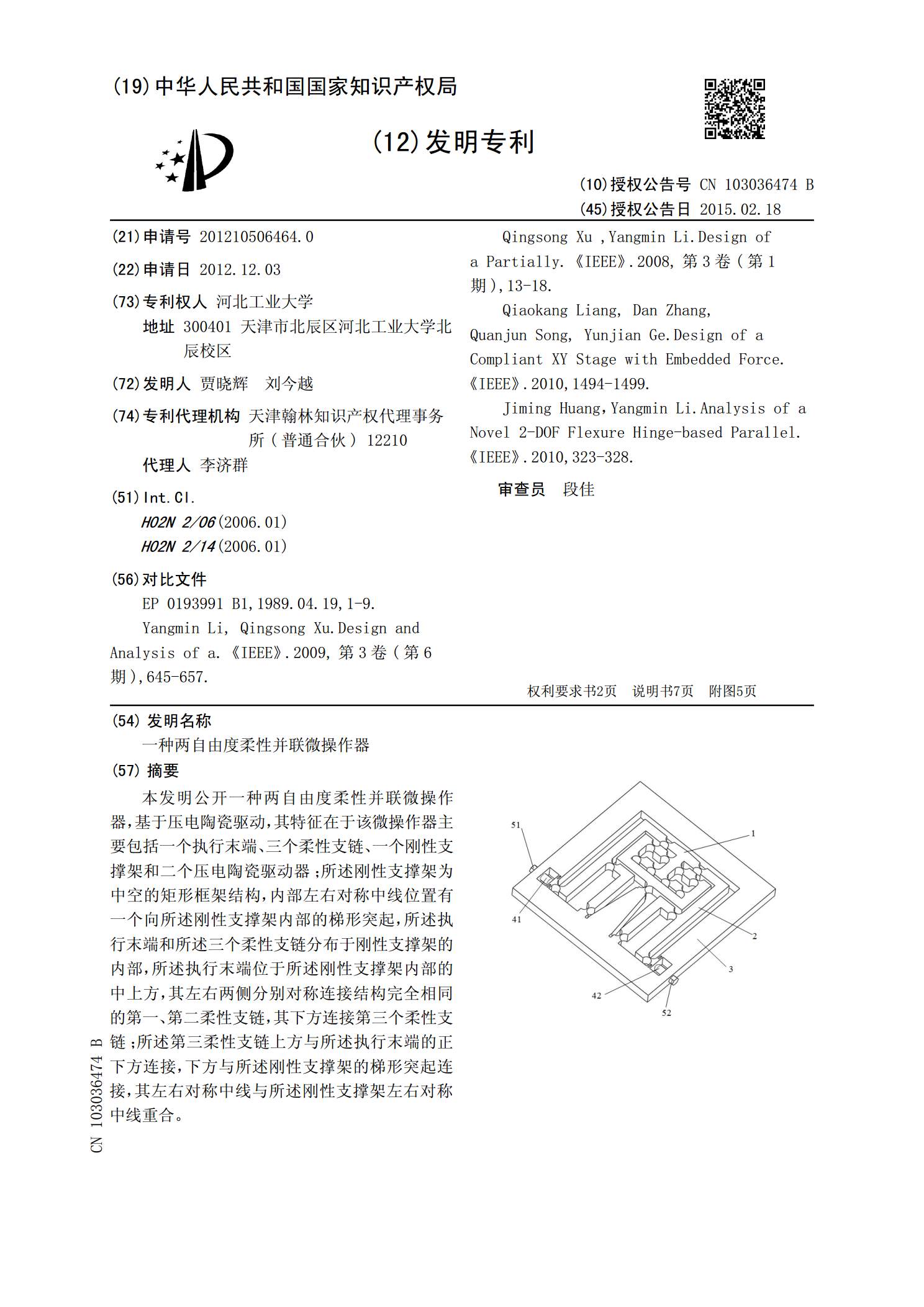
本发明公开一种两自由度柔性并联微操作器,基于压电陶瓷驱动,其特征在于该微操作器主要包括一个执行末端、三个柔性支链、一个刚性支撑架和二个压电陶瓷驱动器;所述刚性支撑架为中空的矩形框架结构,内部左右对称中线位置有一个向所述刚性支撑架内部的梯形突起,所述执行末端和所述三个柔性支链分布于刚性支撑架的内部,所述执行末端位于所述刚性支撑架内部的中上方,其左右两侧分别对称连接结构完全相同的第一、第二柔性支链,其下方连接第三个柔性支链;所述第三柔性支链上方与所述执行末端的正下方连接,下方与所述刚性支撑架的梯形突起连接,其
一种衣模机器人两自由度肘关节驱动装置.pdf
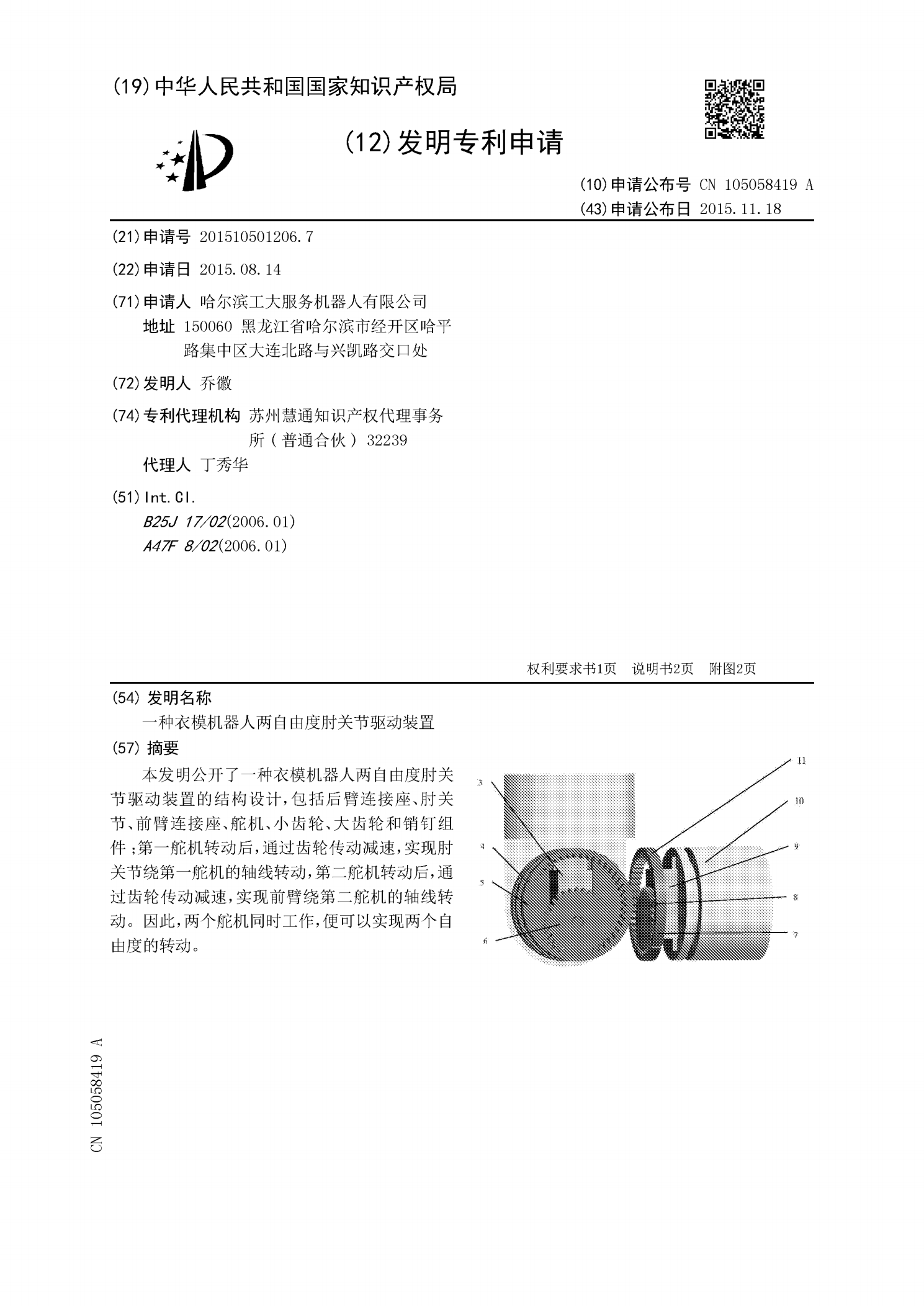
本发明公开了一种衣模机器人两自由度肘关节驱动装置的结构设计,包括后臂连接座、肘关节、前臂连接座、舵机、小齿轮、大齿轮和销钉组件;第一舵机转动后,通过齿轮传动减速,实现肘关节绕第一舵机的轴线转动,第二舵机转动后,通过齿轮传动减速,实现前臂绕第二舵机的轴线转动。因此,两个舵机同时工作,便可以实现两个自由度的转动。

一种新型两自由度柔性并联机械手的优化设计.docx
一种新型两自由度柔性并联机械手的优化设计标题:基于优化设计的新型两自由度柔性并联机械手摘要:本文介绍了一种新型的两自由度柔性并联机械手的优化设计方法。该设计结合先进的材料和工艺技术,以提高机械手的柔性和精度为目标。通过建立机械手的动力学模型,对其关键参数进行优化,并采用仿真验证了优化设计的性能。实验结果表明,该优化设计方法可以显著提高机械手的柔性并节约成本,具有广泛的应用前景。1.引言柔性并联机械手是一种具有较高柔性和精度的机械手,广泛应用于精密加工、装配和操作等领域。传统的两自由度柔性并联机械手设计存在