
一种仿生机器人两自由度柔性颈部关节结构.pdf

是立****92

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种仿生机器人两自由度柔性颈部关节结构.pdf
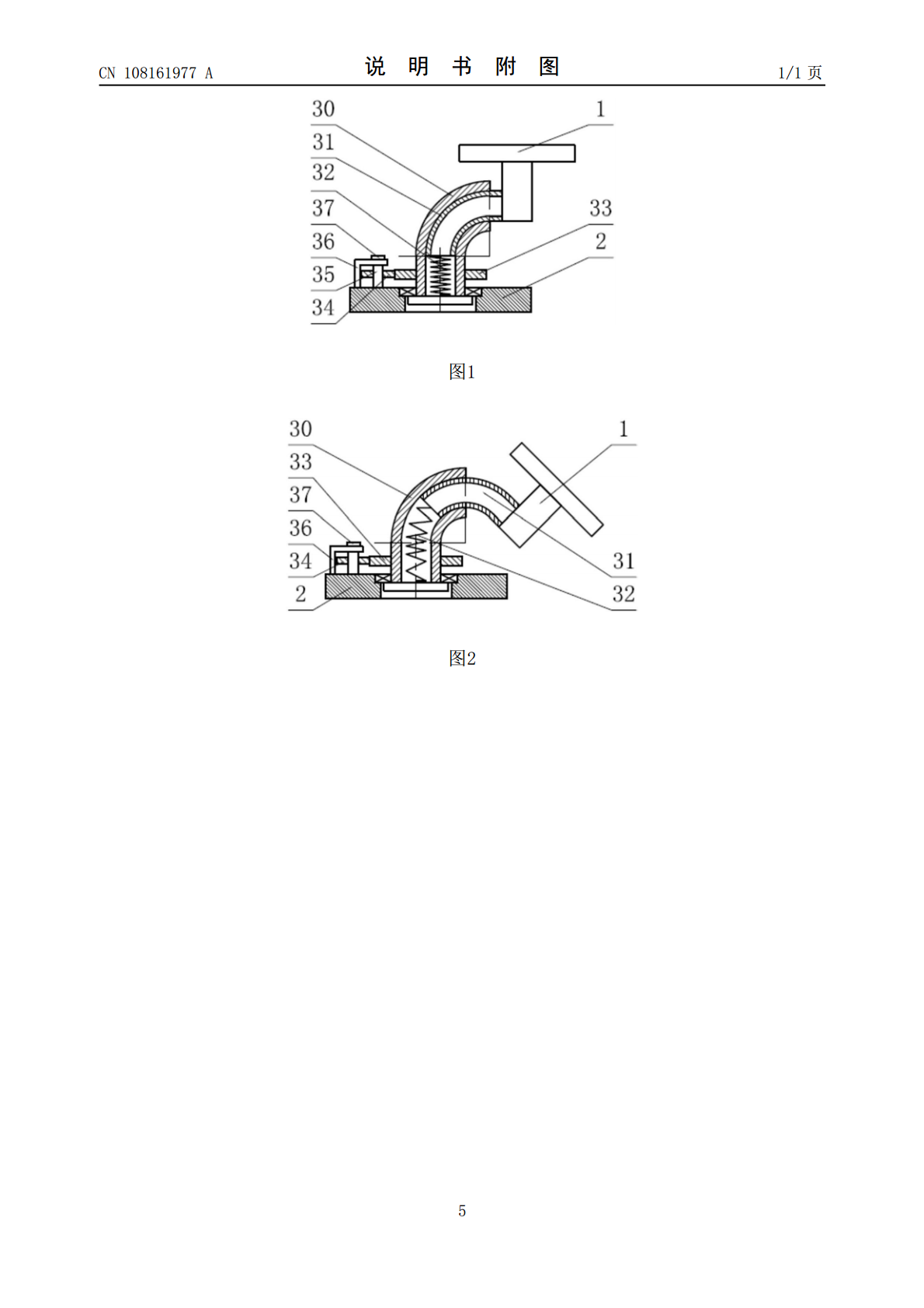
本发明公开了一种仿生机器人两自由度柔性颈部关节结构,属于仿生机器人领域。它包括可连接机器人头部的颈部连接件,可连接机器人躯体的躯干连接件,和装设于颈部连接件与躯干连接件之间的、具有头部旋转与前后点头功能的复合颈部关节主体;复合颈部关节主体包括外置曲线管、内置曲线管、磁铁弹簧复合装置、步进电机、主动轴、小齿轮和大齿轮;磁铁弹簧复合装置驱动内置曲线管相对于外置曲线管曲线运动,从而通过颈部屈伸实现前后点头功能。本发明是一种能够用作仿生机器人的颈部关节、更加类人地实现头部转动与前后点头姿态、且颈部可以自由屈伸的柔
一种三自由度机器人专用颈部关节结构.pdf
本发明公开了一种三自由度机器人专用颈部关节结构,属于工业机器人关节设计领域。它包括用于装设机器人头部的外连接件B、采用圆柱铰链装设于外连接件B上的内连接件、与机器人躯体相连的外连接件A、装设于外连接件A上可以自由转动的齿轮轴C,与齿轮轴C相啮合传动的齿轮轴D、通过电机C架固定装设于外连接件B上的电机C、装设于内连接件上的齿轮轴B和电机B、装设于外连接件B上与齿轮轴B啮合传动的齿轮轴A。本发明是一种结构更加合理、运动更加稳定、可用于工业机器人中、具有三个运动自由度的专用颈部关节结构。
柔性仿生关节和机器人.pdf
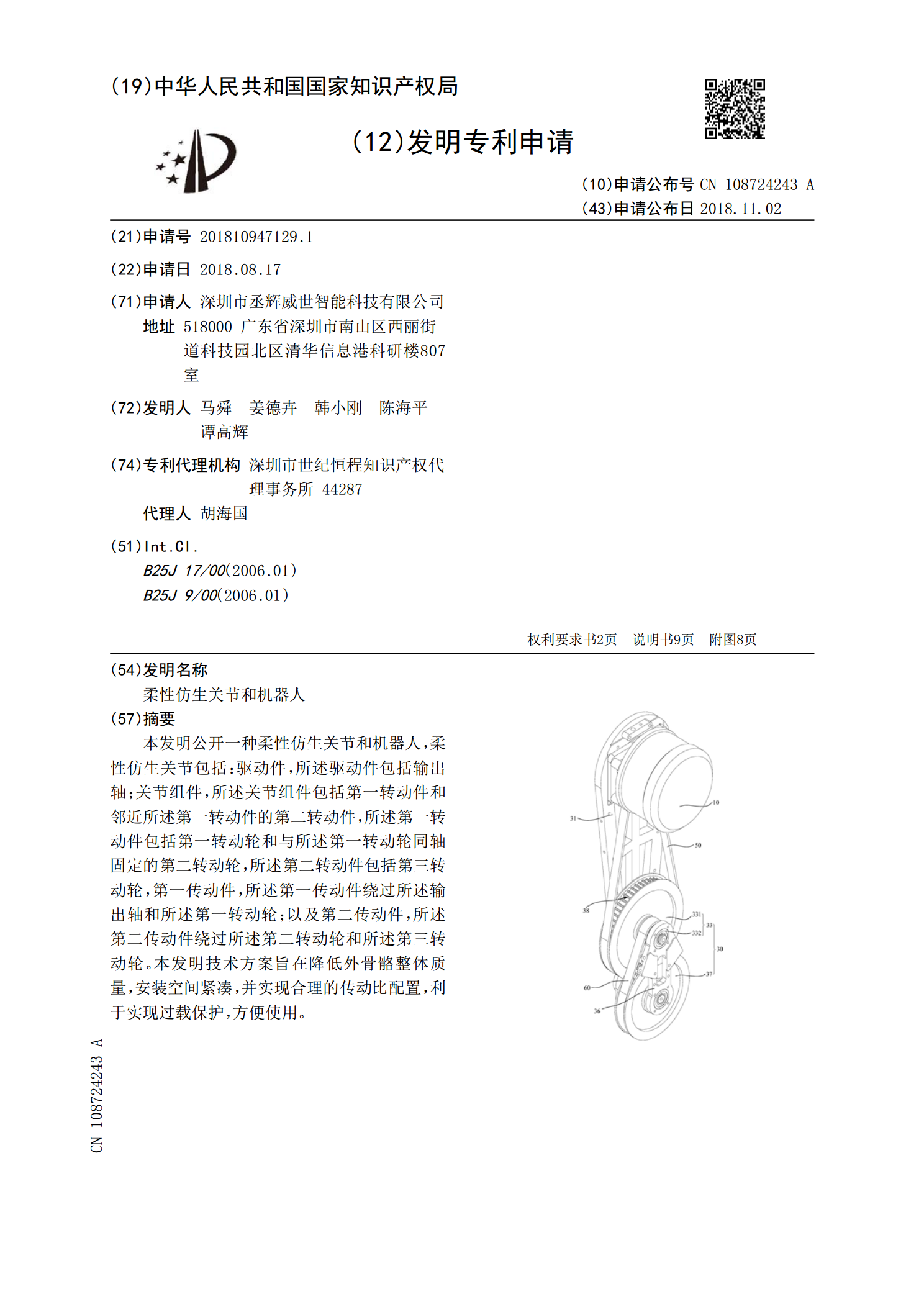
本发明公开一种柔性仿生关节和机器人,柔性仿生关节包括:驱动件,所述驱动件包括输出轴;关节组件,所述关节组件包括第一转动件和邻近所述第一转动件的第二转动件,所述第一转动件包括第一转动轮和与所述第一转动轮同轴固定的第二转动轮,所述第二转动件包括第三转动轮,第一传动件,所述第一传动件绕过所述输出轴和所述第一转动轮;以及第二传动件,所述第二传动件绕过所述第二转动轮和所述第三转动轮。本发明技术方案旨在降低外骨骼整体质量,安装空间紧凑,并实现合理的传动比配置,利于实现过载保护,方便使用。

一种两自由度的柔性肘关节.pdf
本发明公开了一种两自由度的柔性肘关节,属于机器人领域。它包括端部设有半球形凹槽的肱骨架、一端设有球形圆头可以绕肱骨架的凹槽相对转动的尺桡骨端、与尺桡骨端同轴线装设的尺桡骨主架、肱尺关节与肱桡关节;尺关节包括肱尺关节轮A、尺关节轮B、肱尺关节电机和肱尺关节弹簧;桡关节包括其输出轴穿过装设于尺桡骨主架内部的滚动轴承A并与锥齿轮A相连的肱桡关节电机,与锥齿轮A啮合传动并装设于尺桡骨端右侧外部上的锥齿轮B。本发明是一种同时具有转动和扭转两个自由度、采用磁性吸附装设、转动中心可以发生微小位移的柔性肘关节。

机器人两自由度关节结构.pdf
本发明提供一种机器人两自由度关节结构,包括第一同步齿形带、第一谐波减速器、小臂、手腕、端盖、第二同步齿形带、轴套、传动轴、锥齿轮、第二谐波减速器。根据本发明所述的机器人两自由度关节结构,结构简化、重量轻,可实现两个方向上的转动操作。