
智能平衡车及其控制方法.pdf

一条****88

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能平衡车及其控制方法.pdf
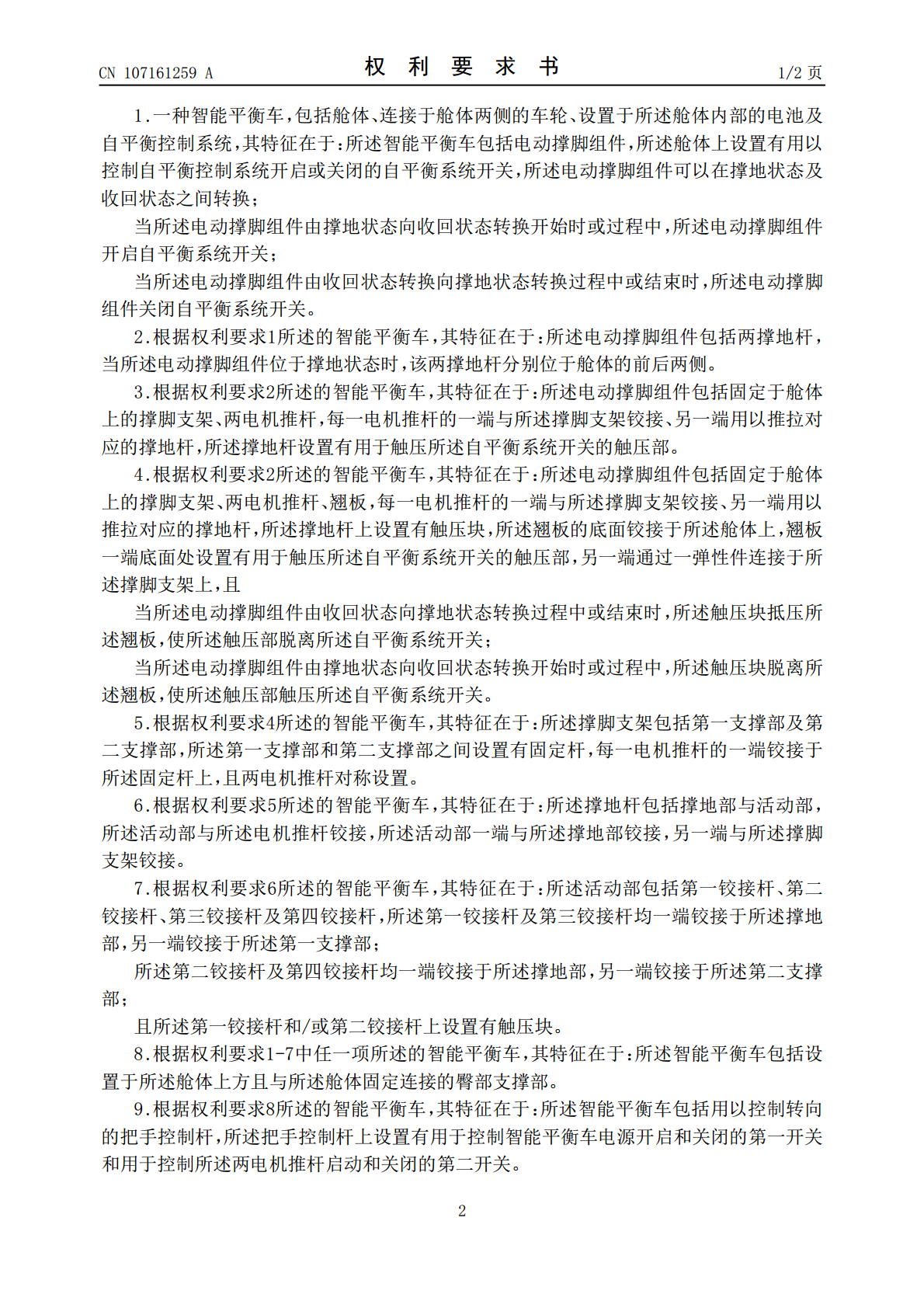
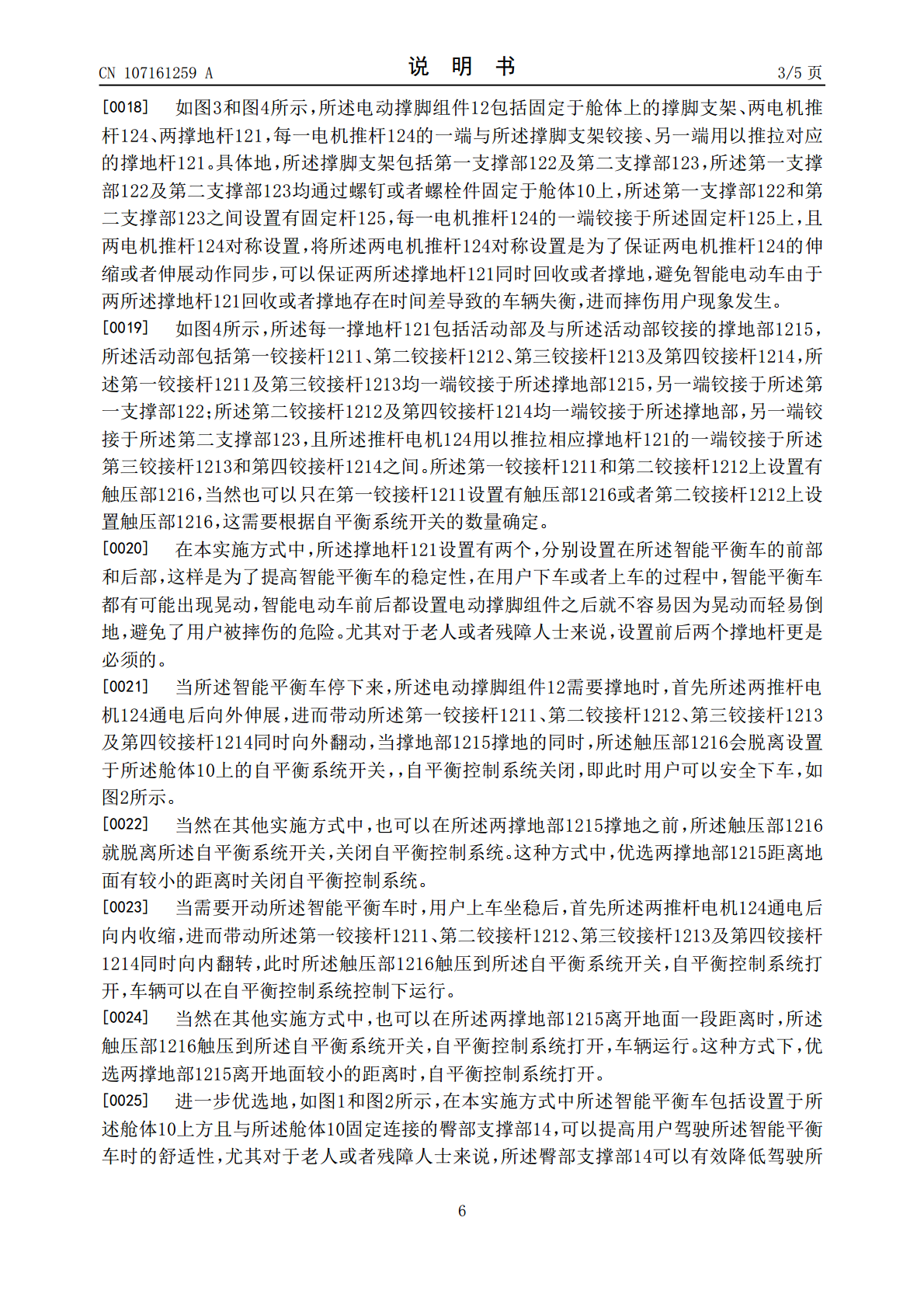
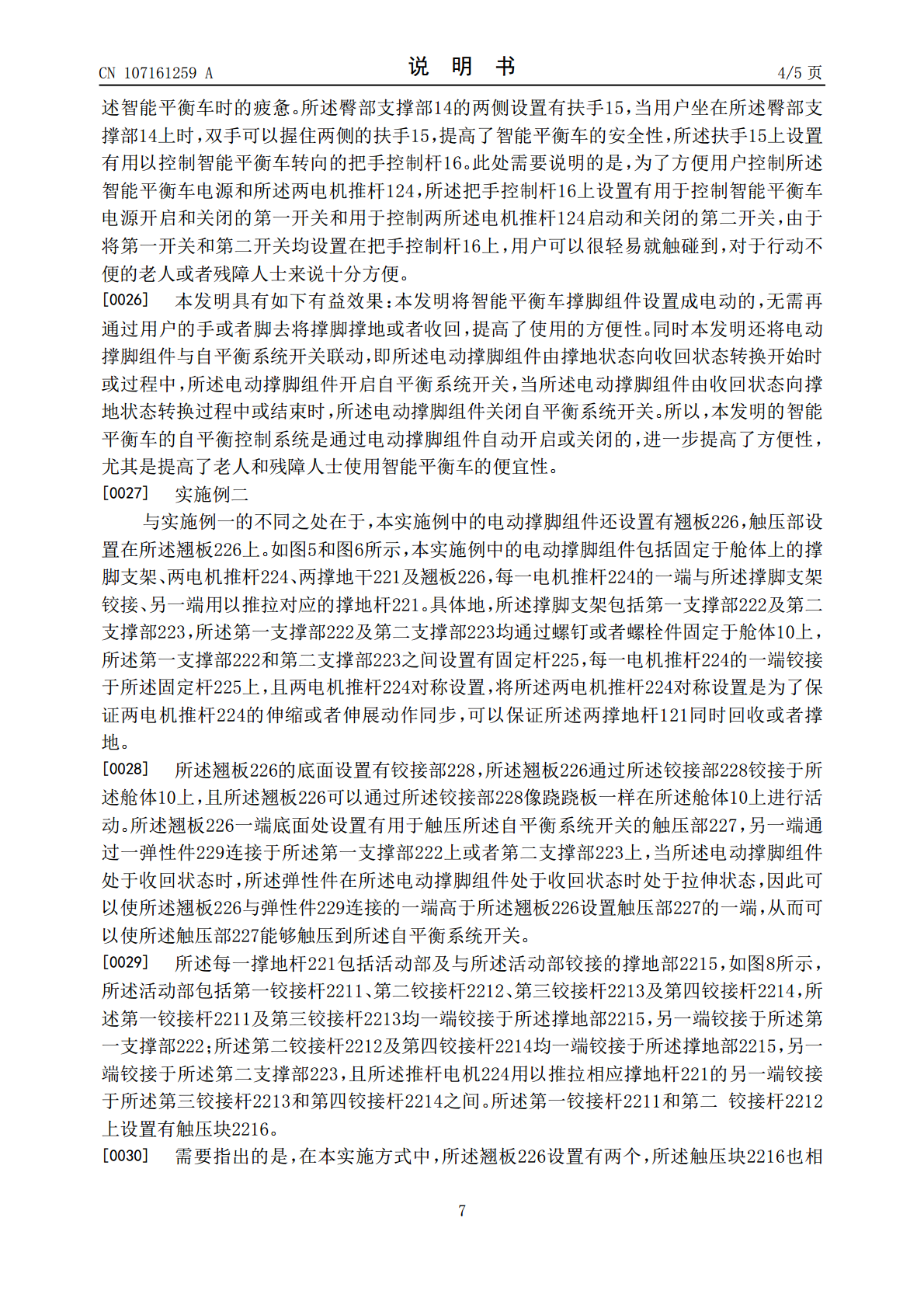
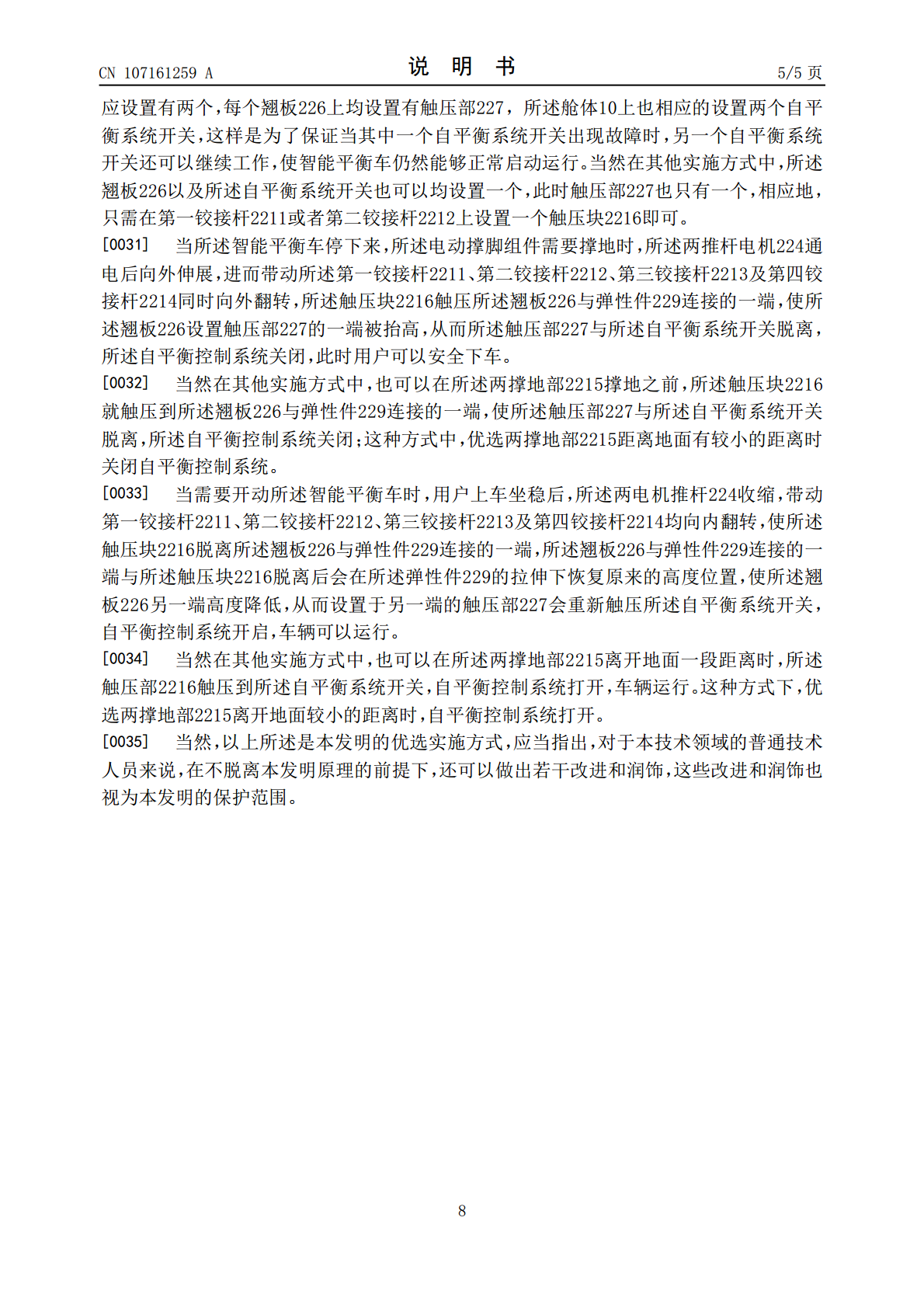
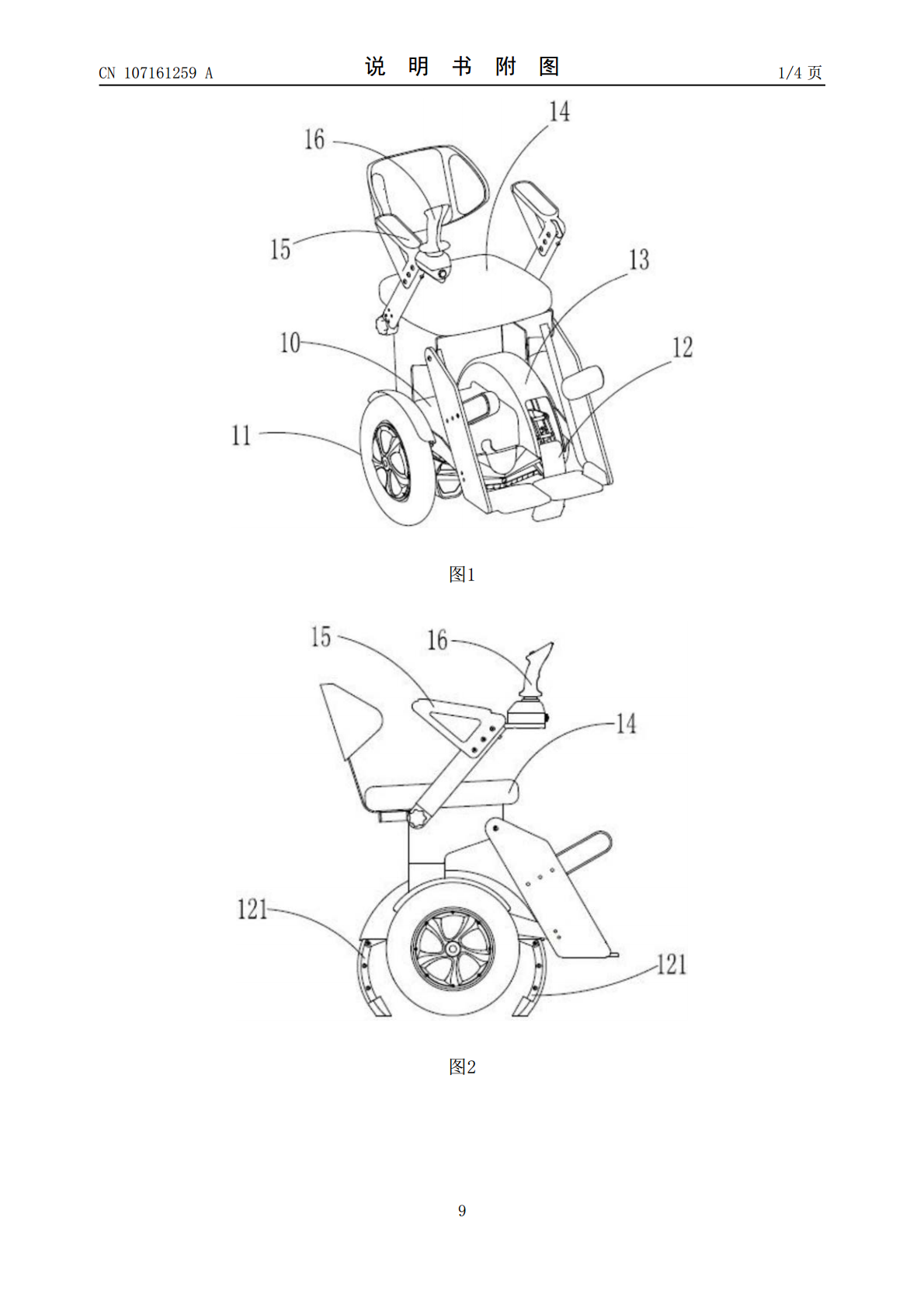
本发明公开了一种智能平衡车,包括舱体、连接于舱体两侧的车轮、设置于所述舱体内部的电池及自平衡控制系统,所述智能平衡车包括电动撑脚组件,所述舱体上设置有用以控制自平衡控制系统开启或关闭的自平衡系统开关,所述电动撑脚组件可以在撑地状态及收回状态之间转换;当所述电动撑脚组件由撑地状态向收回状态转换开始时或过程中,所述电动撑脚组件开启自平衡系统开关;当所述电动撑脚组件由收回状态转换向撑地状态转换过程中或结束时,所述电动撑脚组件关闭自平衡系统开关。本发明将智能平衡车撑脚组件设置成电动的,无需再通过用户的手或者脚去将
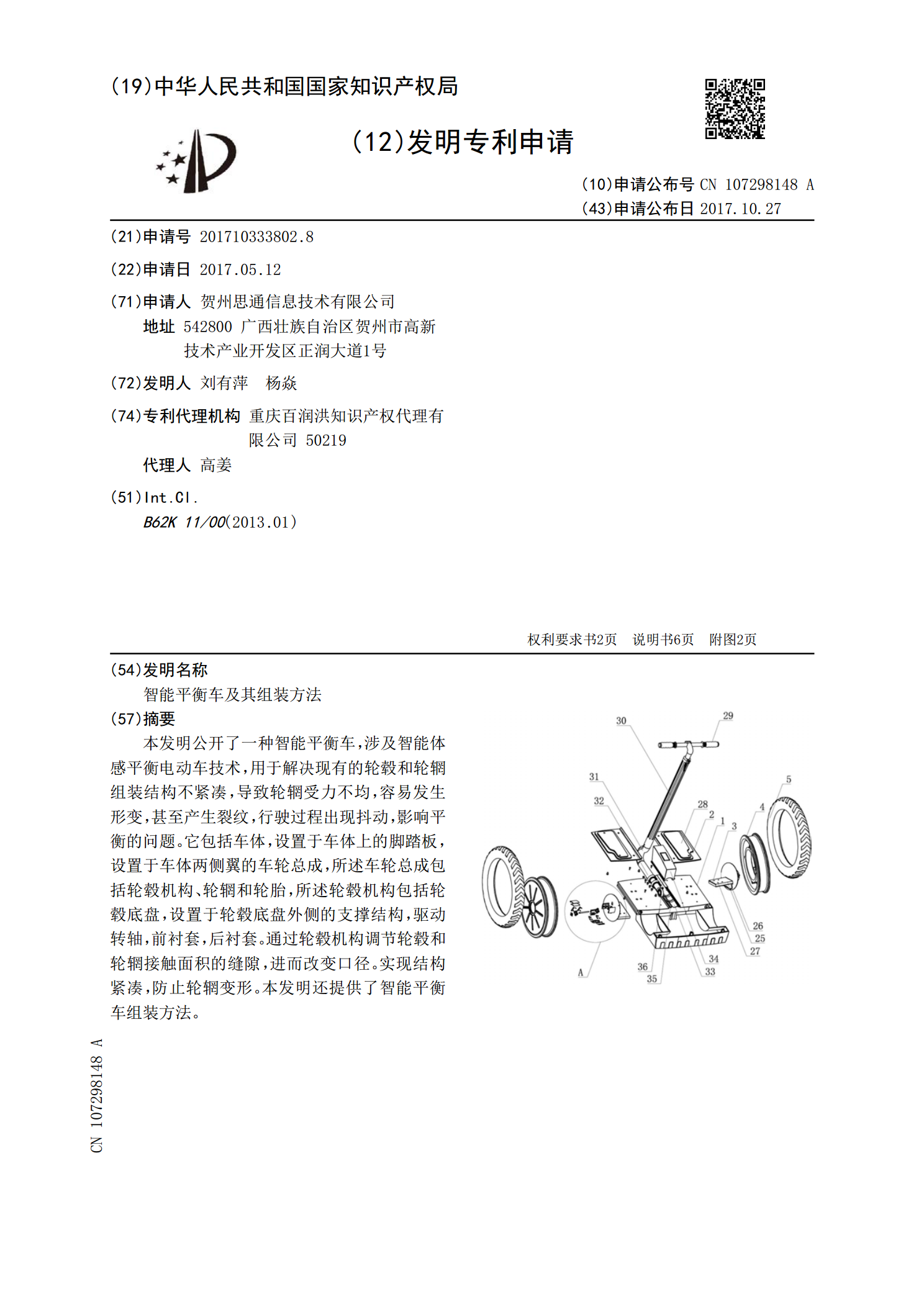
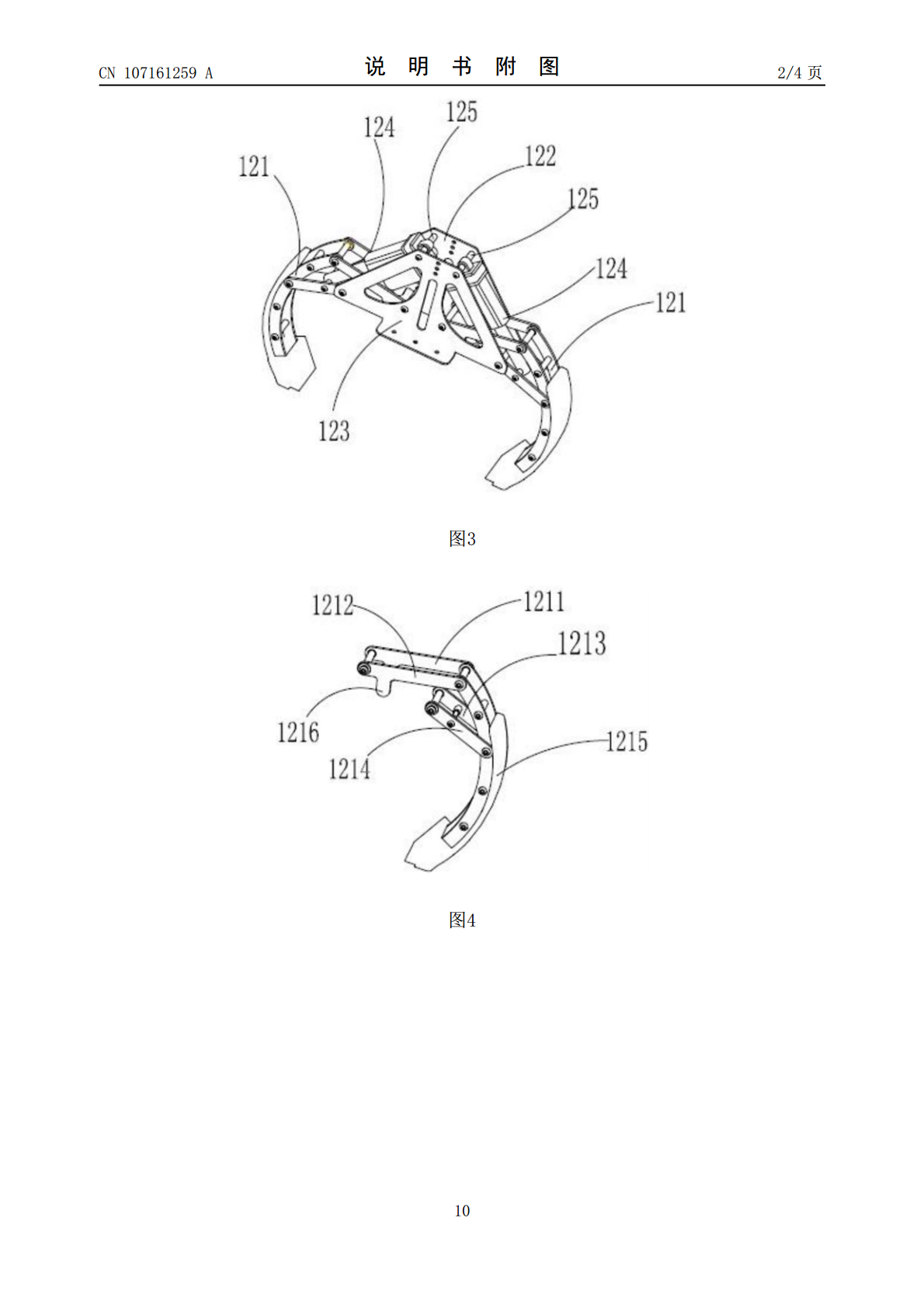
智能平衡车及其组装方法.pdf
本发明公开了一种智能平衡车,涉及智能体感平衡电动车技术,用于解决现有的轮毂和轮辋组装结构不紧凑,导致轮辋受力不均,容易发生形变,甚至产生裂纹,行驶过程出现抖动,影响平衡的问题。它包括车体,设置于车体上的脚踏板,设置于车体两侧翼的车轮总成,所述车轮总成包括轮毂机构、轮辋和轮胎,所述轮毂机构包括轮毂底盘,设置于轮毂底盘外侧的支撑结构,驱动转轴,前衬套,后衬套。通过轮毂机构调节轮毂和轮辋接触面积的缝隙,进而改变口径。实现结构紧凑,防止轮辋变形。本发明还提供了智能平衡车组装方法。
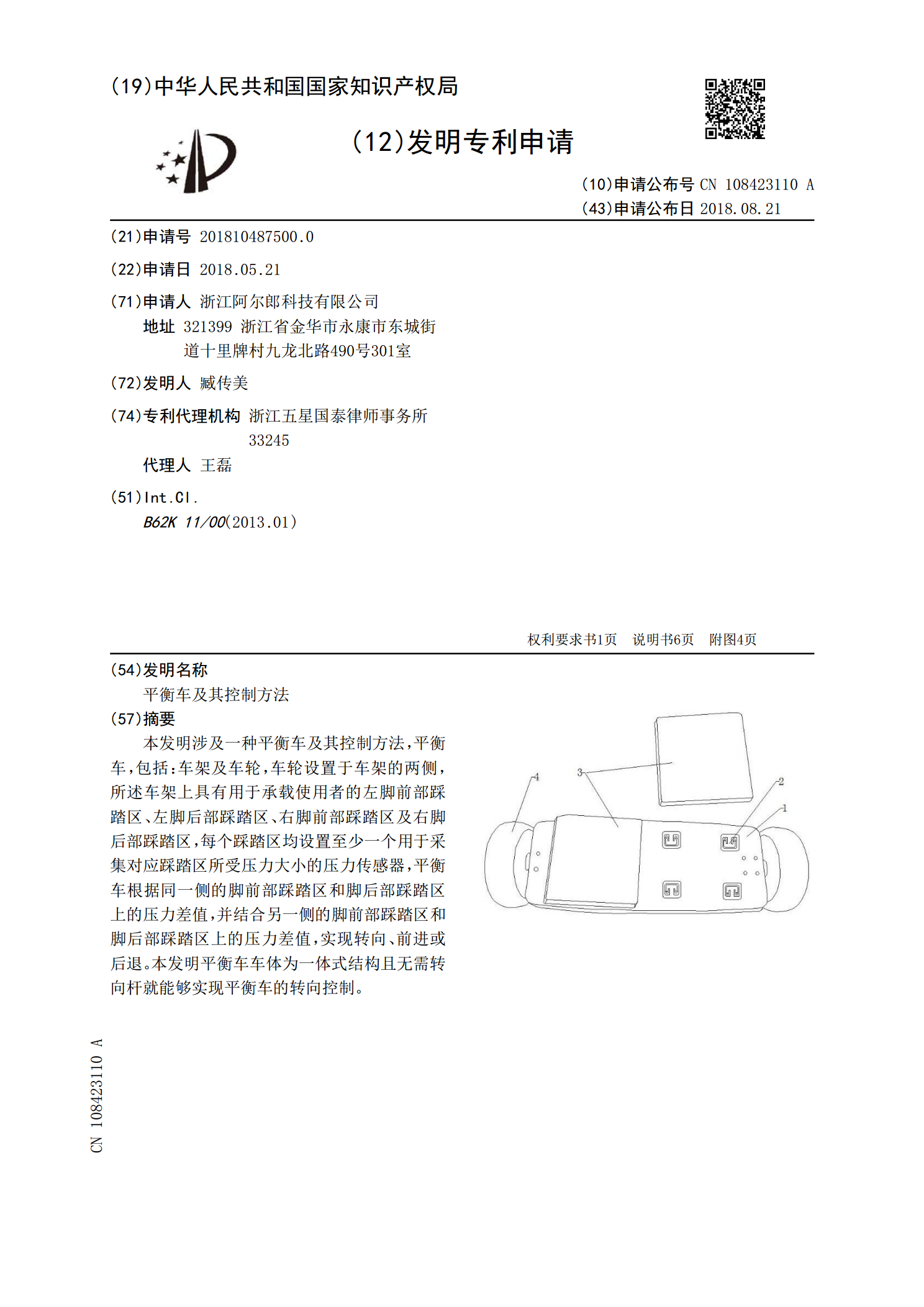
平衡车及其控制方法.pdf
本发明涉及一种平衡车及其控制方法,平衡车,包括:车架及车轮,车轮设置于车架的两侧,所述车架上具有用于承载使用者的左脚前部踩踏区、左脚后部踩踏区、右脚前部踩踏区及右脚后部踩踏区,每个踩踏区均设置至少一个用于采集对应踩踏区所受压力大小的压力传感器,平衡车根据同一侧的脚前部踩踏区和脚后部踩踏区上的压力差值,并结合另一侧的脚前部踩踏区和脚后部踩踏区上的压力差值,实现转向、前进或后退。本发明平衡车车体为一体式结构且无需转向杆就能够实现平衡车的转向控制。
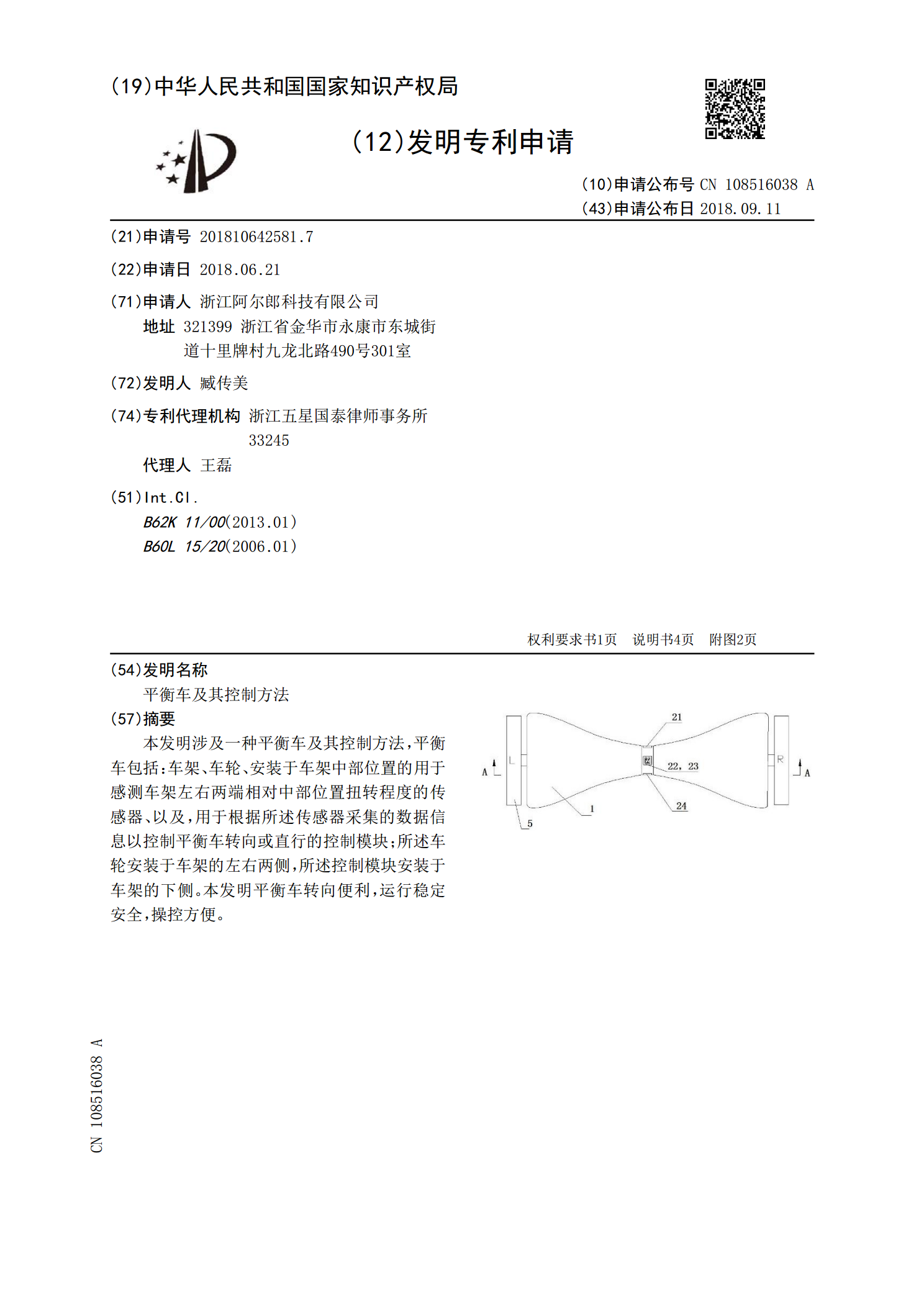
平衡车及其控制方法.pdf
本发明涉及一种平衡车及其控制方法,平衡车包括:车架、车轮、安装于车架中部位置的用于感测车架左右两端相对中部位置扭转程度的传感器、以及,用于根据所述传感器采集的数据信息以控制平衡车转向或直行的控制模块;所述车轮安装于车架的左右两侧,所述控制模块安装于车架的下侧。本发明平衡车转向便利,运行稳定安全,操控方便。

一种两轮智能平衡车及其控制方法.pdf
本发明涉及一种两轮智能平衡车及其控制方法,包括主程序和定时中断程序,在主程序开始之后,执行定时中断程序,进入定时中断程序时,主程序暂停,定时中断程序结束后返回主程序暂停的位置;定时中断程序包括以下步骤:获取与平衡车两个车轮分别相连的两个电机的定子电压和绕组电流,分别计算获得电机转矩,通过电机转矩、磁链调节器以及矢量表生成两个电机所需要12路的PWM,进行直接转矩控制,输出到电机,完成平衡车的控制。本发明中采用直接转矩控制,输入量只需要定子电压和绕组电流,无需位置传感器,节约了成本并且稳定了性能;输出量是一