
平衡车及其控制方法.pdf

猫巷****熙柔

1/8

2/8
3/8
4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
平衡车及其控制方法.pdf
本发明涉及一种平衡车及其控制方法,平衡车,包括:车架及车轮,车轮设置于车架的两侧,所述车架上具有用于承载使用者的左脚前部踩踏区、左脚后部踩踏区、右脚前部踩踏区及右脚后部踩踏区,每个踩踏区均设置至少一个用于采集对应踩踏区所受压力大小的压力传感器,平衡车根据同一侧的脚前部踩踏区和脚后部踩踏区上的压力差值,并结合另一侧的脚前部踩踏区和脚后部踩踏区上的压力差值,实现转向、前进或后退。本发明平衡车车体为一体式结构且无需转向杆就能够实现平衡车的转向控制。
平衡车及其控制方法.pdf
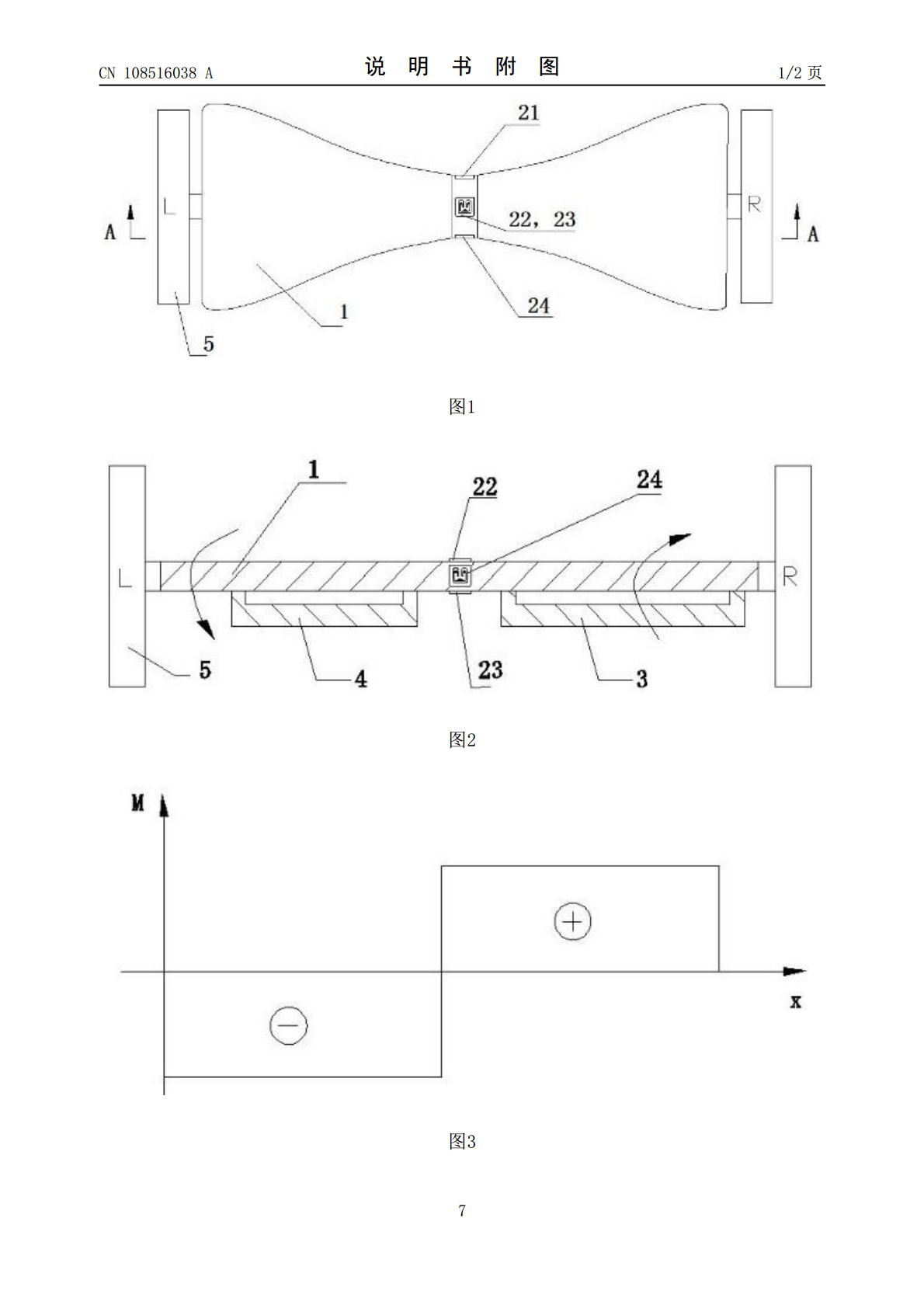
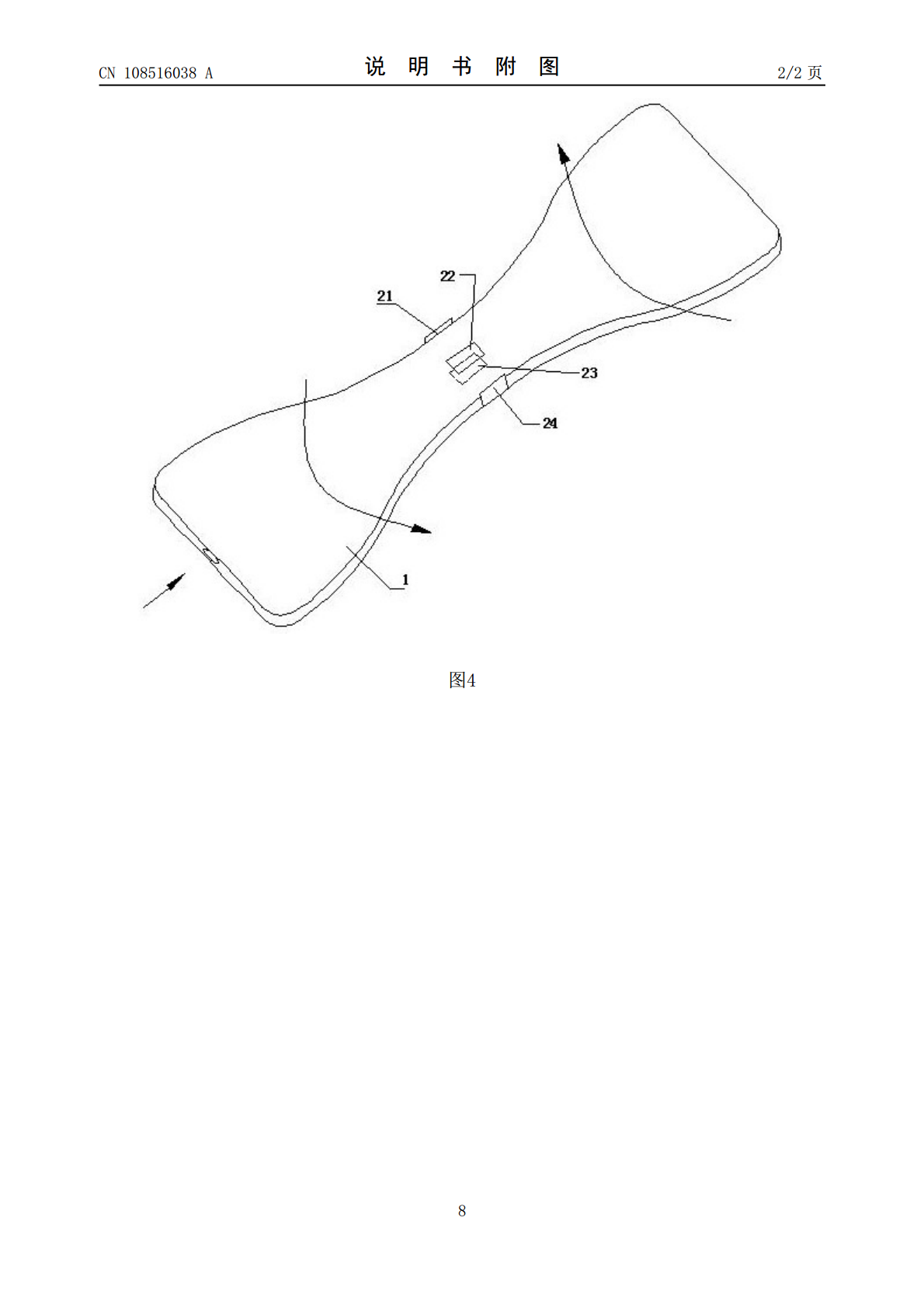
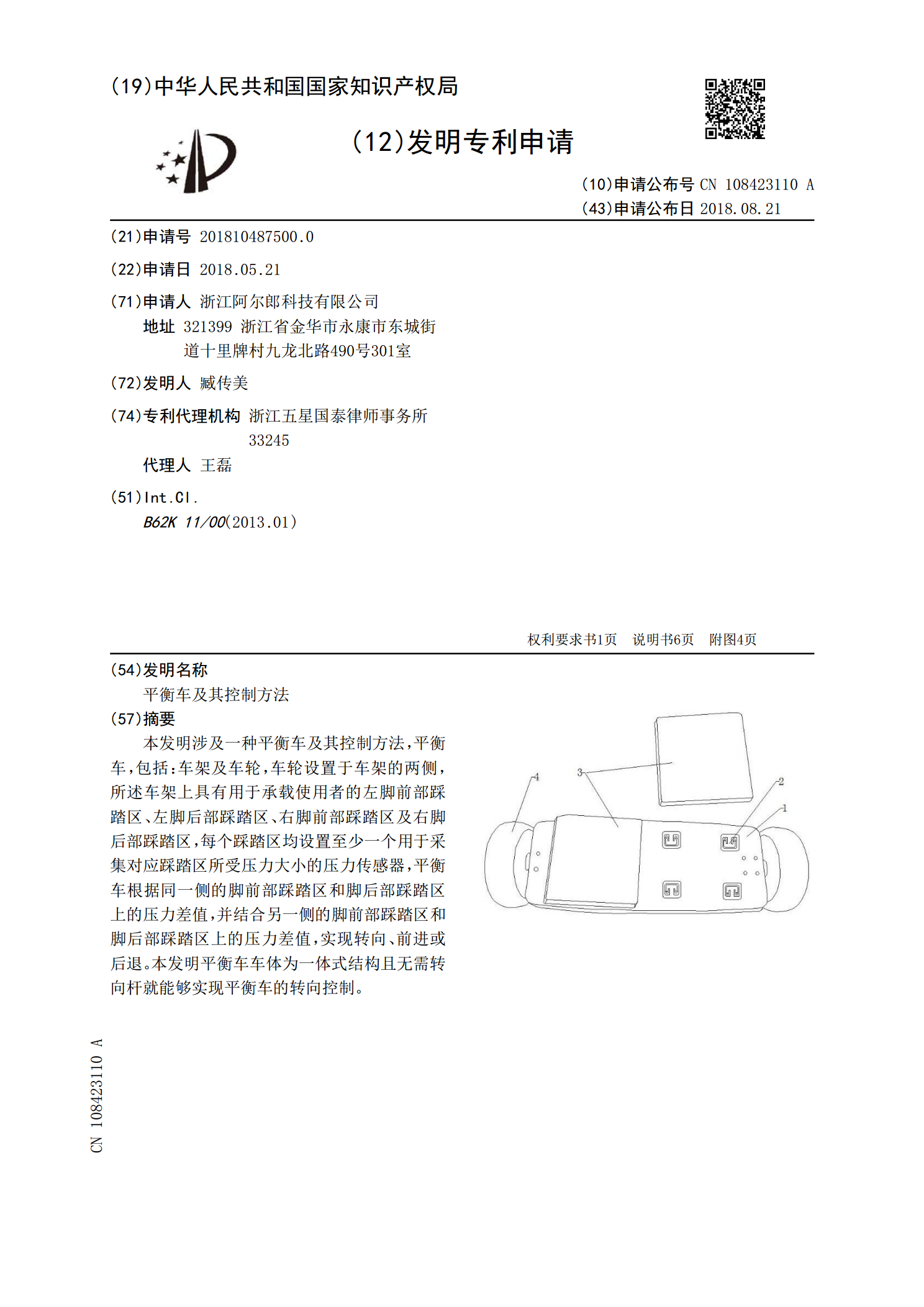
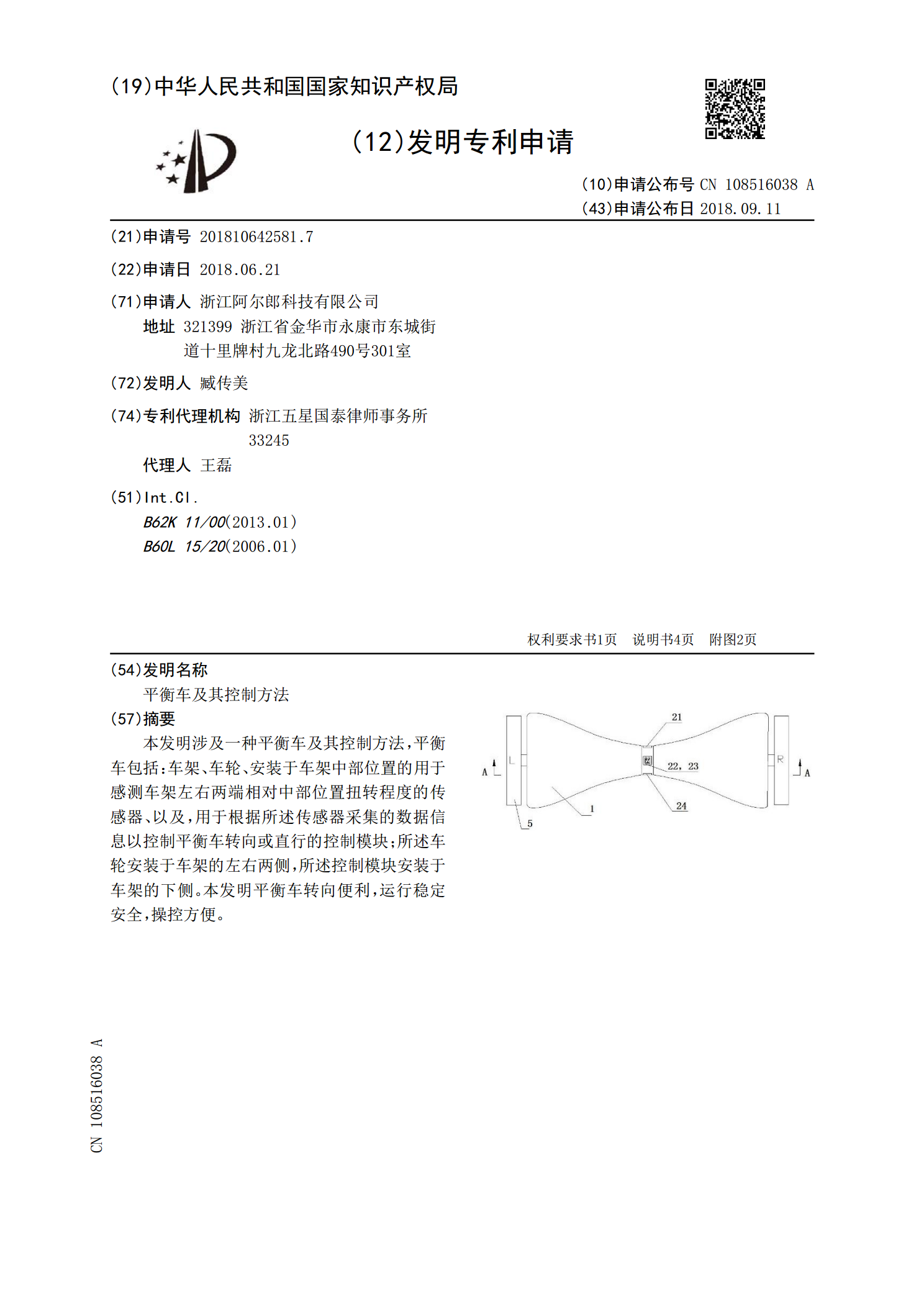
本发明涉及一种平衡车及其控制方法,平衡车包括:车架、车轮、安装于车架中部位置的用于感测车架左右两端相对中部位置扭转程度的传感器、以及,用于根据所述传感器采集的数据信息以控制平衡车转向或直行的控制模块;所述车轮安装于车架的左右两侧,所述控制模块安装于车架的下侧。本发明平衡车转向便利,运行稳定安全,操控方便。

智能平衡车及其控制方法.pdf
本发明公开了一种智能平衡车,包括舱体、连接于舱体两侧的车轮、设置于所述舱体内部的电池及自平衡控制系统,所述智能平衡车包括电动撑脚组件,所述舱体上设置有用以控制自平衡控制系统开启或关闭的自平衡系统开关,所述电动撑脚组件可以在撑地状态及收回状态之间转换;当所述电动撑脚组件由撑地状态向收回状态转换开始时或过程中,所述电动撑脚组件开启自平衡系统开关;当所述电动撑脚组件由收回状态转换向撑地状态转换过程中或结束时,所述电动撑脚组件关闭自平衡系统开关。本发明将智能平衡车撑脚组件设置成电动的,无需再通过用户的手或者脚去将
电动平衡车及其控制方法.pdf
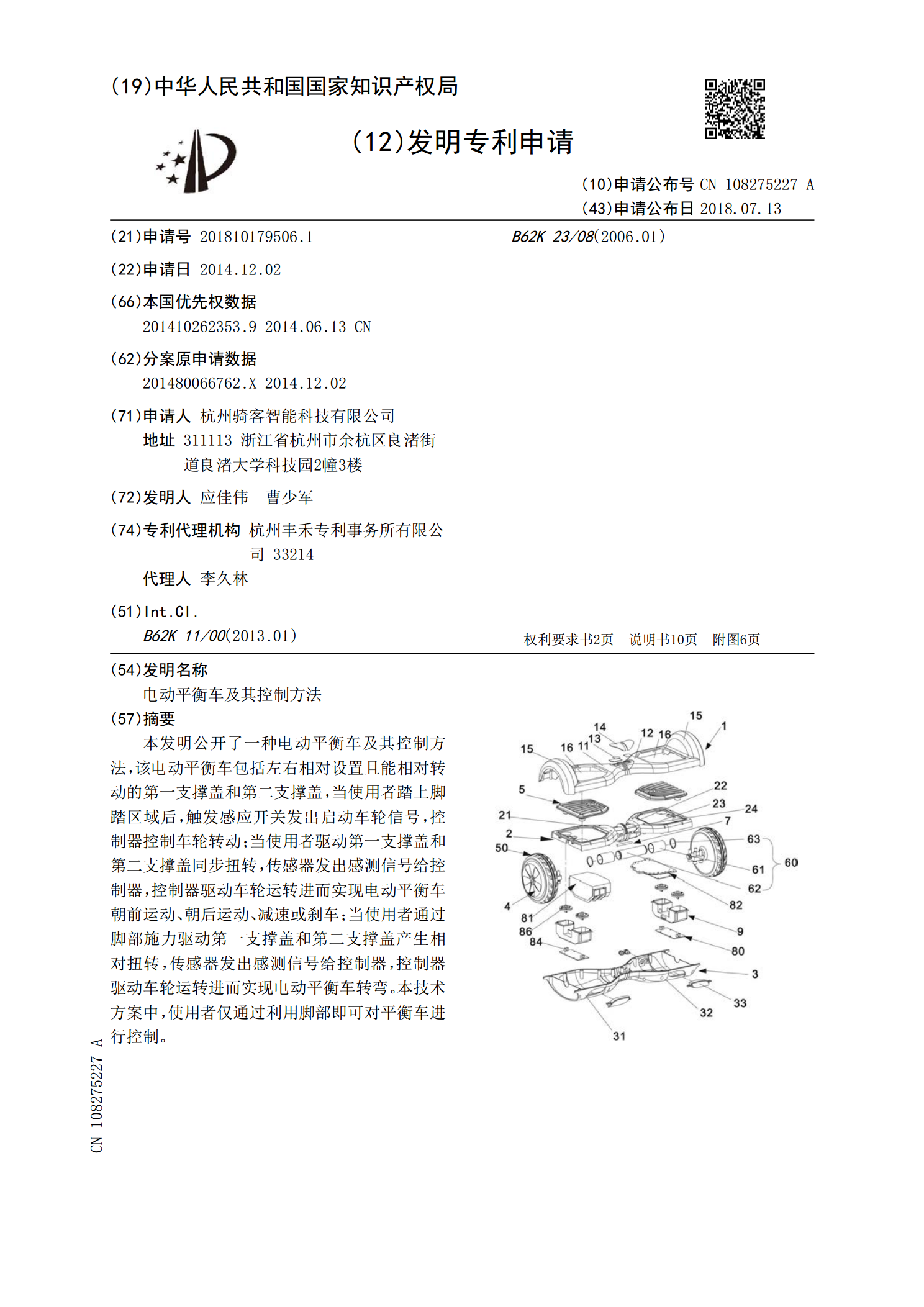
本发明公开了一种电动平衡车及其控制方法,该电动平衡车包括左右相对设置且能相对转动的第一支撑盖和第二支撑盖,当使用者踏上脚踏区域后,触发感应开关发出启动车轮信号,控制器控制车轮转动;当使用者驱动第一支撑盖和第二支撑盖同步扭转,传感器发出感测信号给控制器,控制器驱动车轮运转进而实现电动平衡车朝前运动、朝后运动、减速或刹车;当使用者通过脚部施力驱动第一支撑盖和第二支撑盖产生相对扭转,传感器发出感测信号给控制器,控制器驱动车轮运转进而实现电动平衡车转弯。本技术方案中,使用者仅通过利用脚部即可对平衡车进行控制。
一种平衡车及其控制方法.pdf
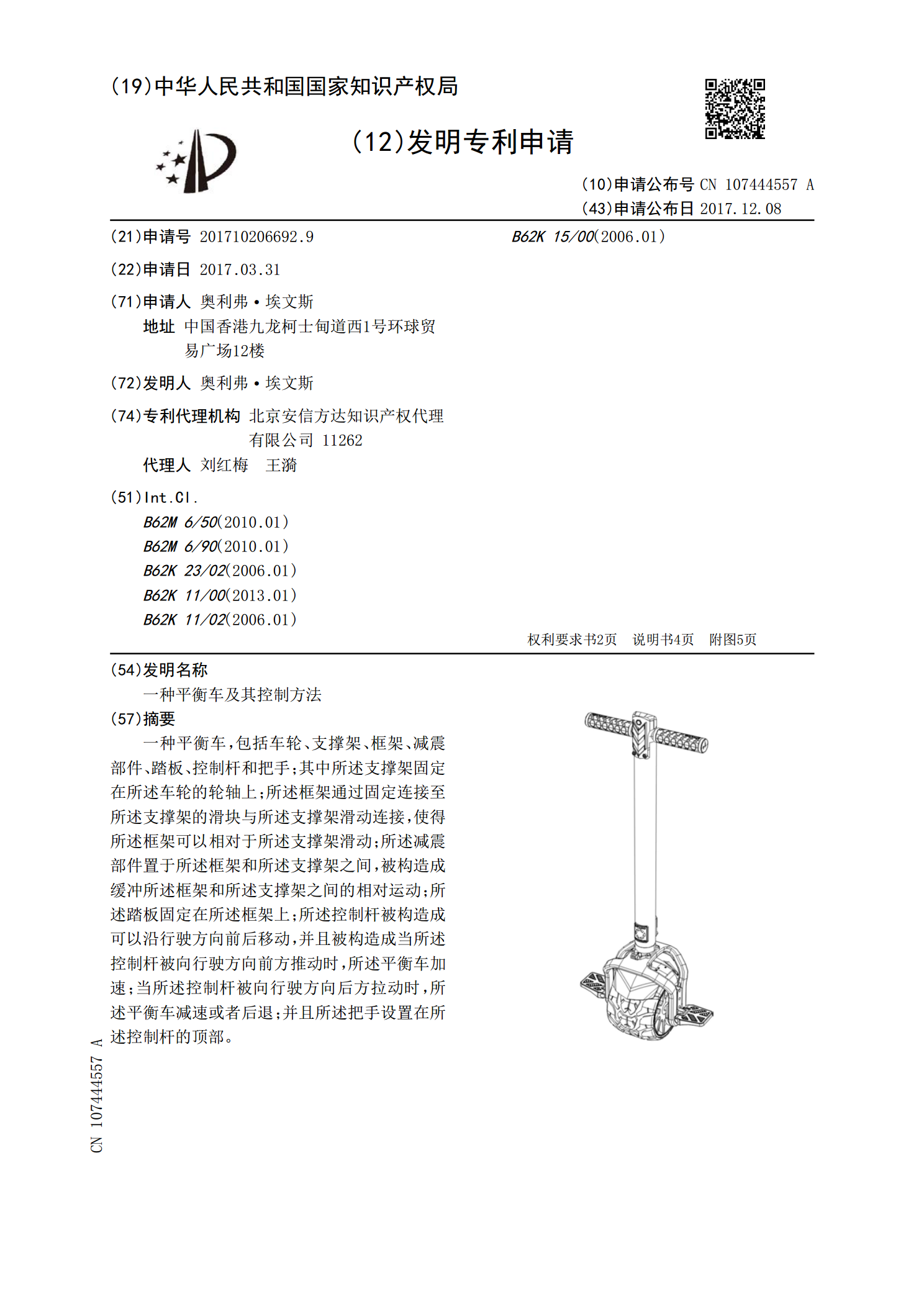
一种平衡车,包括车轮、支撑架、框架、减震部件、踏板、控制杆和把手;其中所述支撑架固定在所述车轮的轮轴上;所述框架通过固定连接至所述支撑架的滑块与所述支撑架滑动连接,使得所述框架可以相对于所述支撑架滑动;所述减震部件置于所述框架和所述支撑架之间,被构造成缓冲所述框架和所述支撑架之间的相对运动;所述踏板固定在所述框架上;所述控制杆被构造成可以沿行驶方向前后移动,并且被构造成当所述控制杆被向行驶方向前方推动时,所述平衡车加速;当所述控制杆被向行驶方向后方拉动时,所述平衡车减速或者后退;并且所述把手设置在所述控制