
一种基于物联网的用于果实采摘分类的智能机器人.pdf

梅雪****67

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于物联网的用于果实采摘分类的智能机器人.pdf
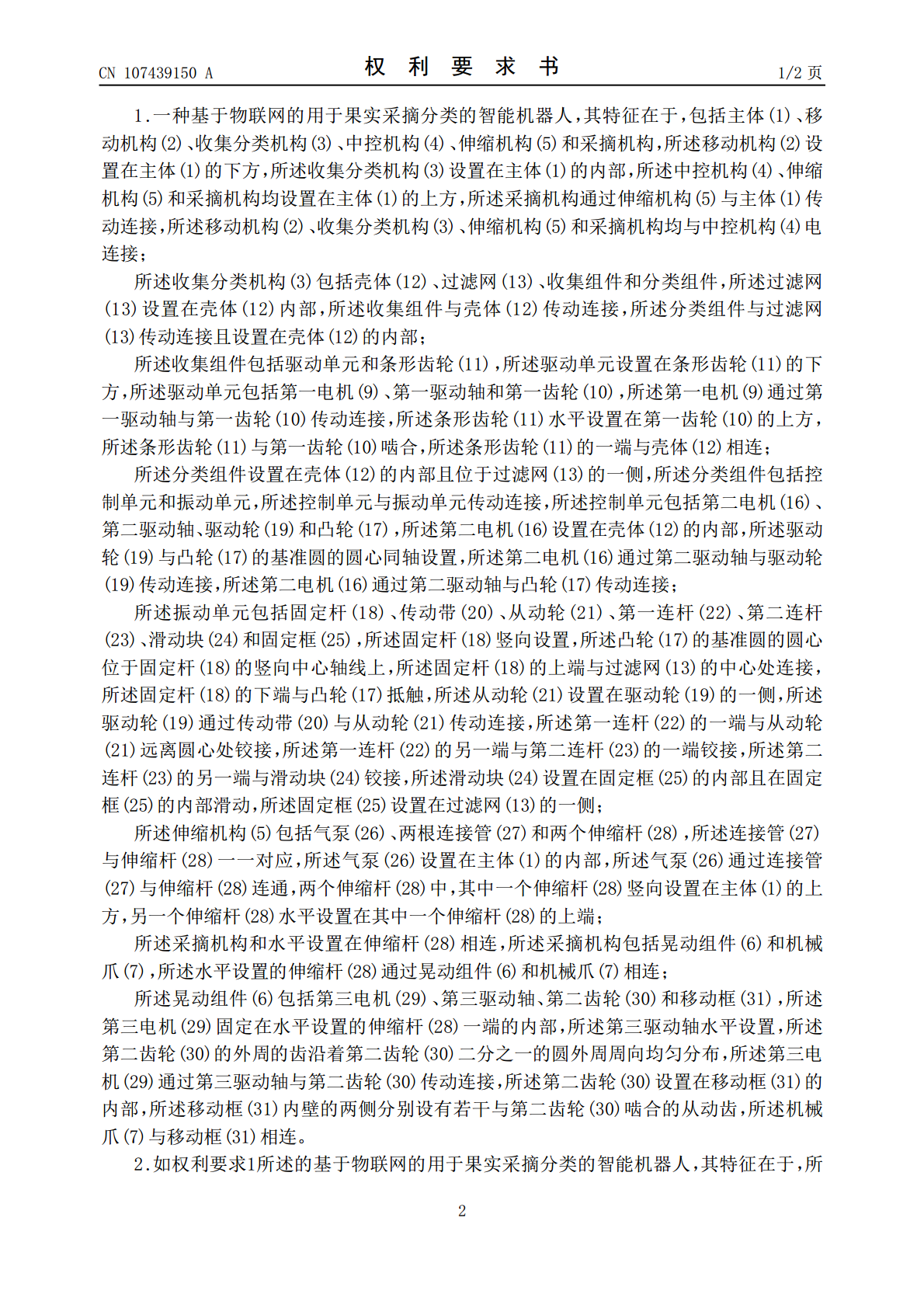
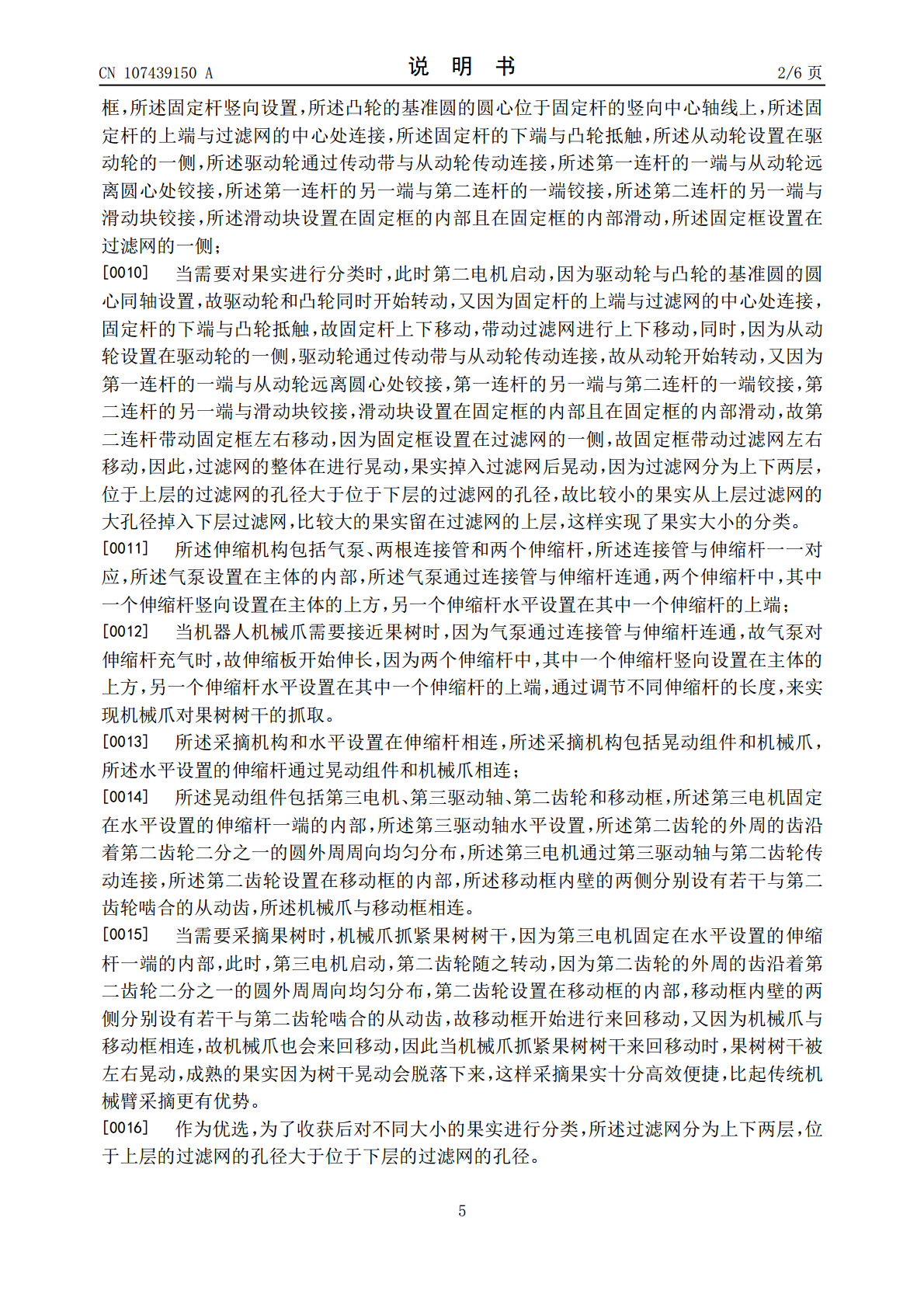
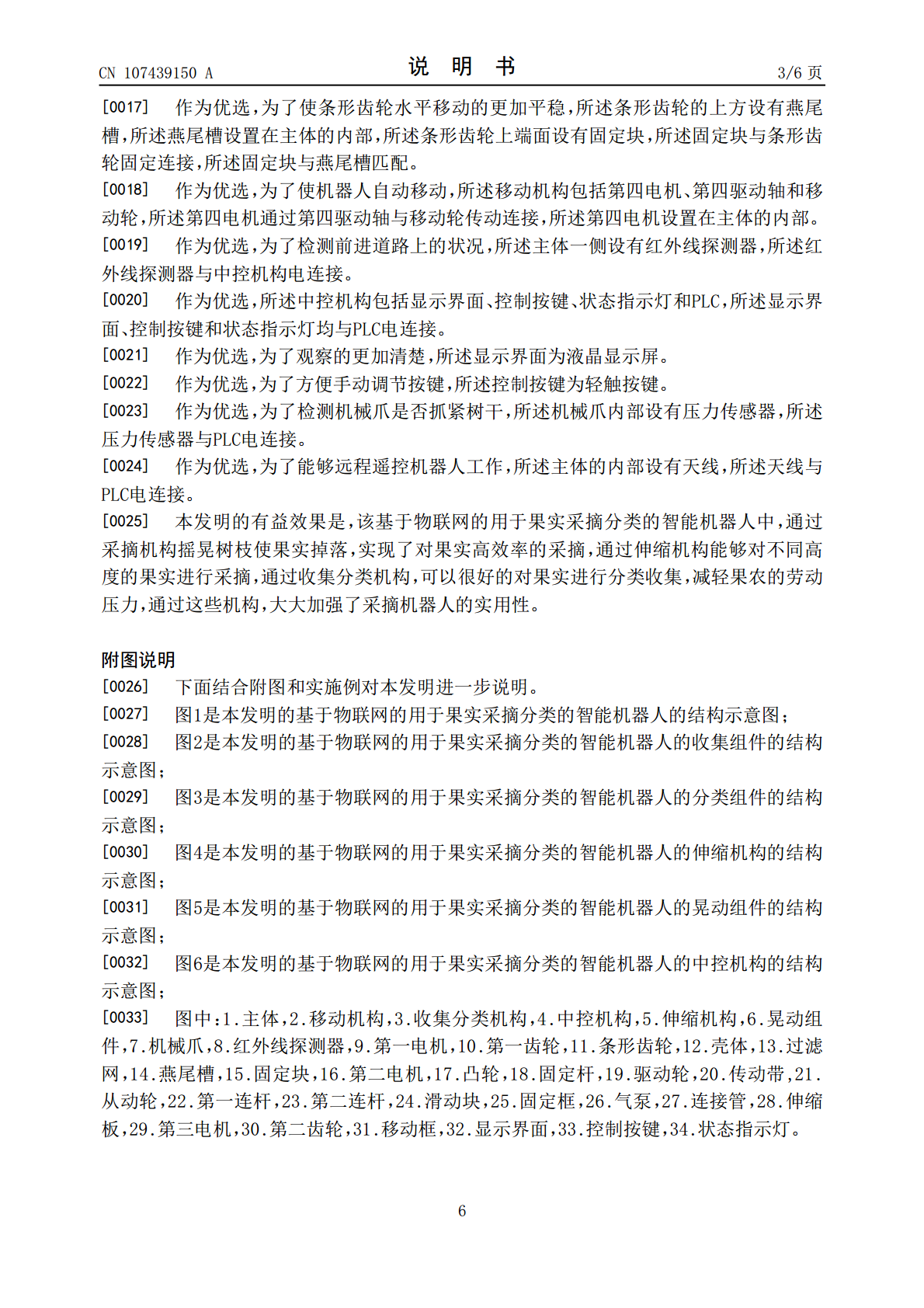
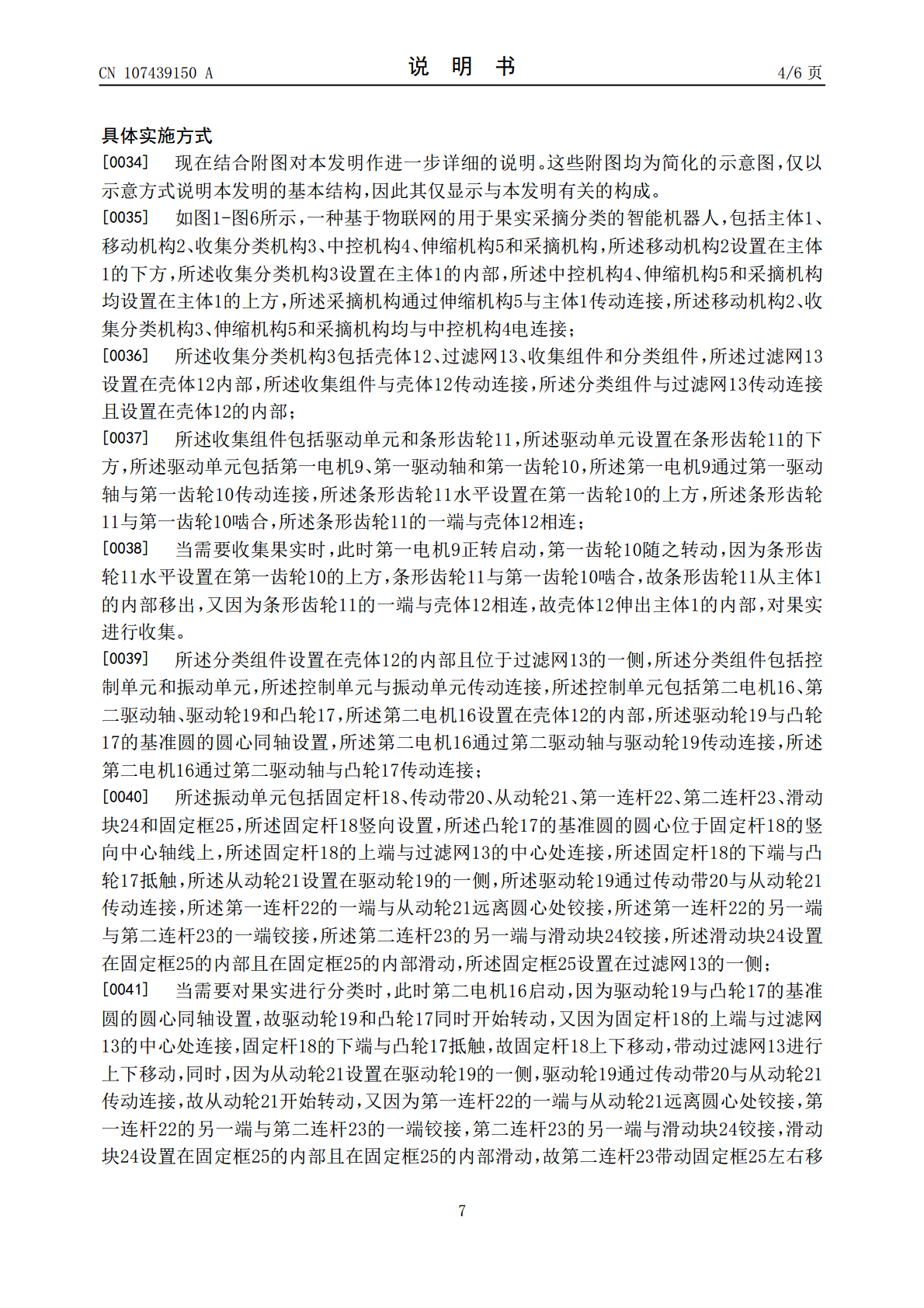
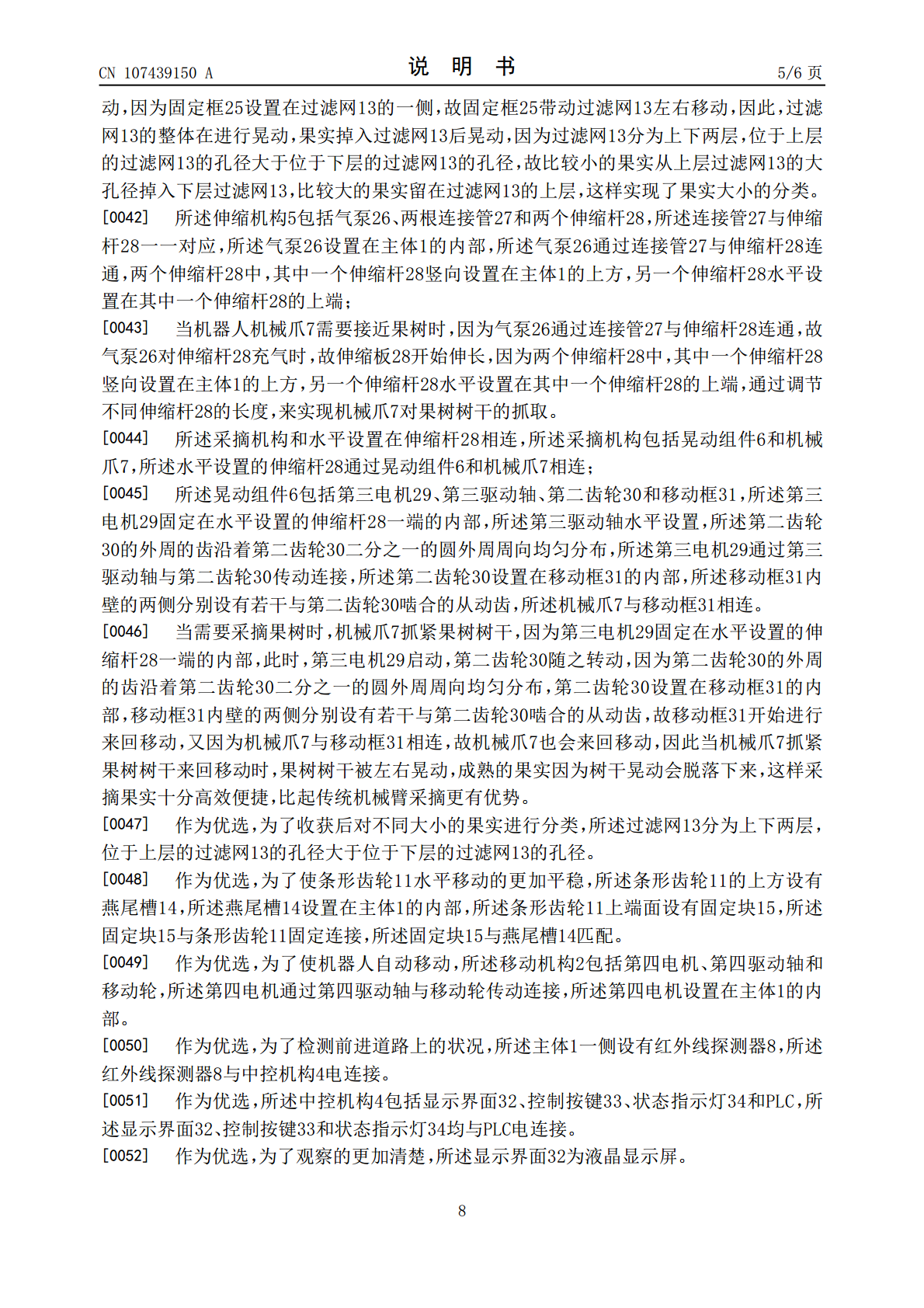
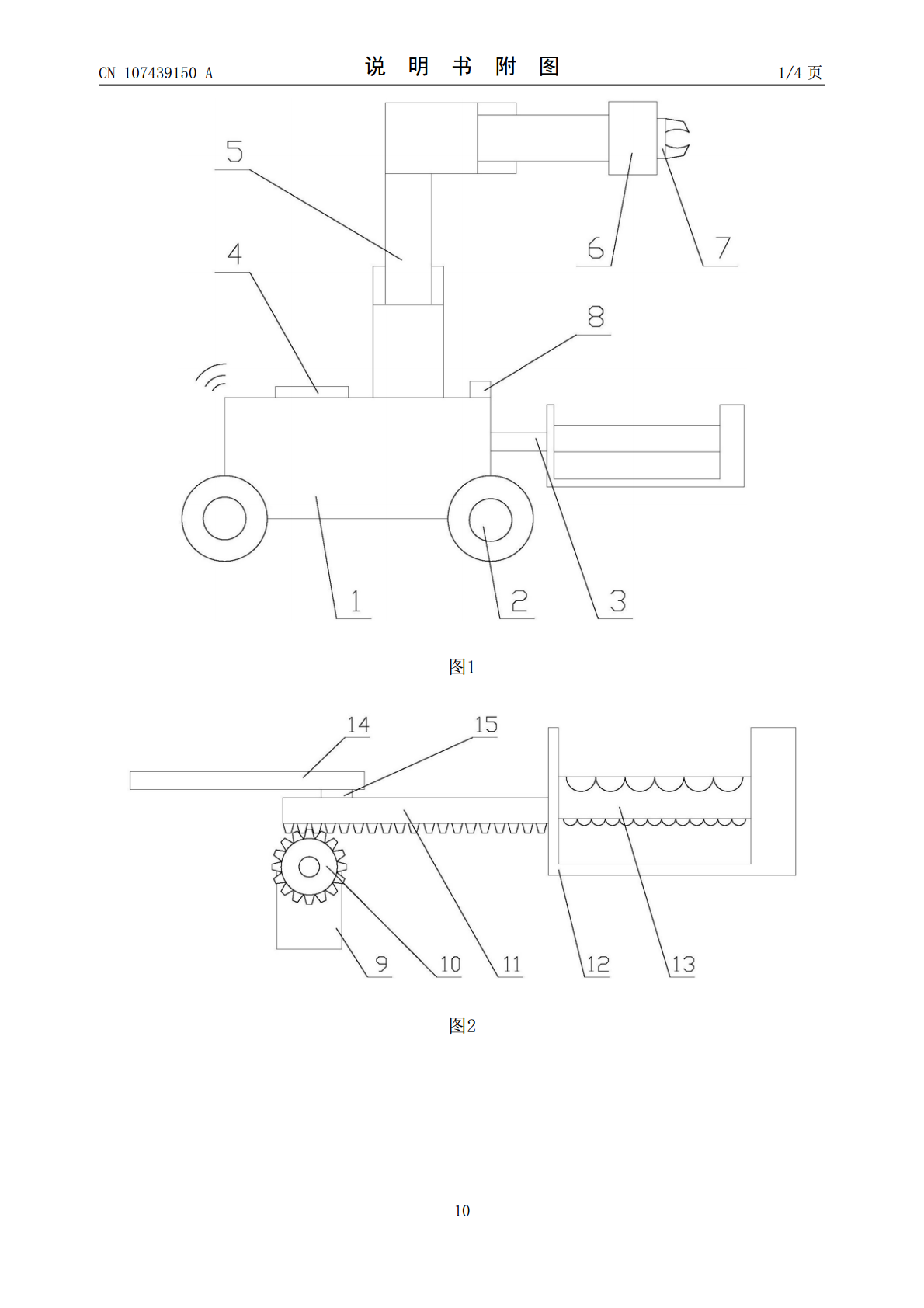
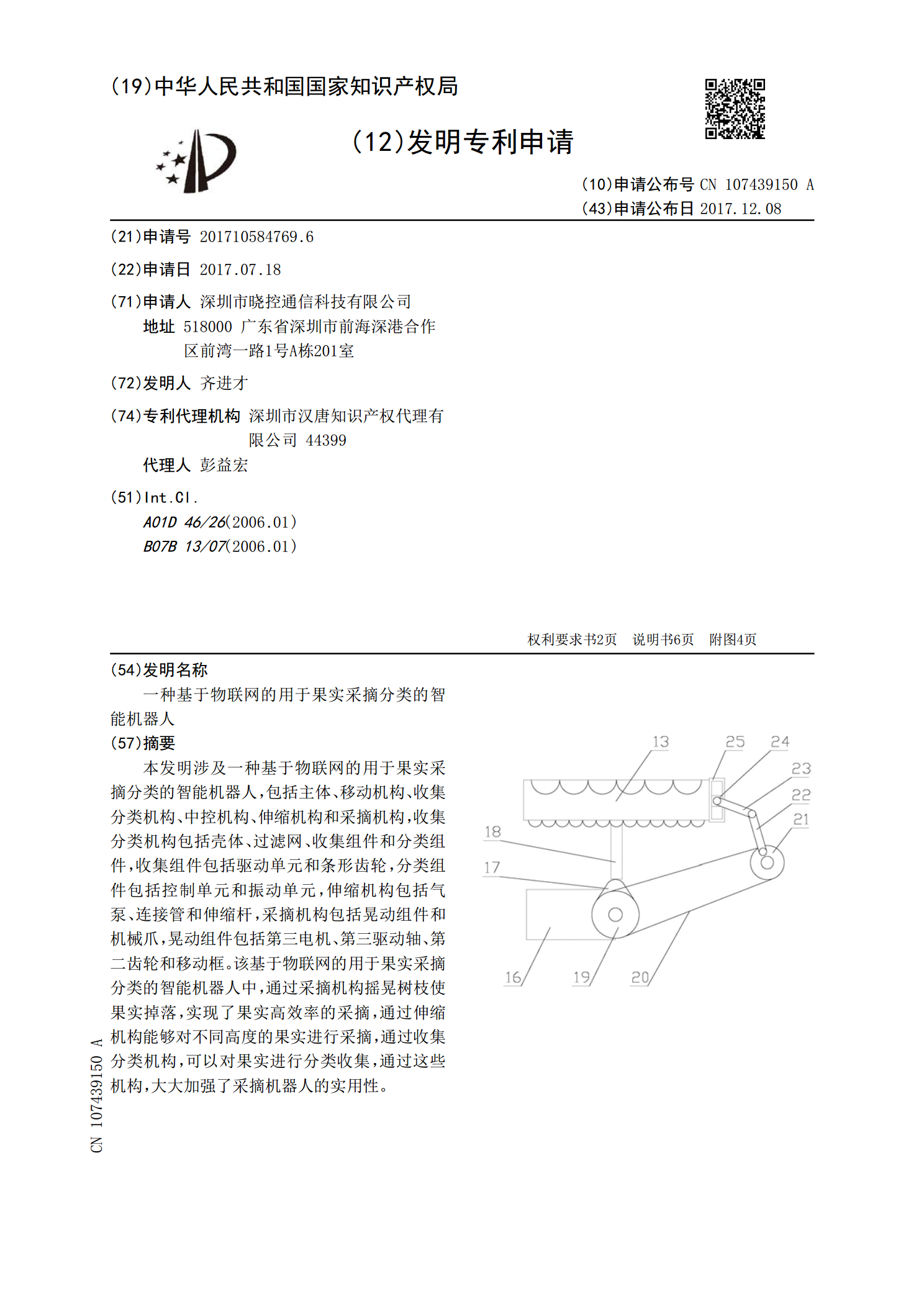
本发明涉及一种基于物联网的用于果实采摘分类的智能机器人,包括主体、移动机构、收集分类机构、中控机构、伸缩机构和采摘机构,收集分类机构包括壳体、过滤网、收集组件和分类组件,收集组件包括驱动单元和条形齿轮,分类组件包括控制单元和振动单元,伸缩机构包括气泵、连接管和伸缩杆,采摘机构包括晃动组件和机械爪,晃动组件包括第三电机、第三驱动轴、第二齿轮和移动框。该基于物联网的用于果实采摘分类的智能机器人中,通过采摘机构摇晃树枝使果实掉落,实现了果实高效率的采摘,通过伸缩机构能够对不同高度的果实进行采摘,通过收集分类机构
一种基于物联网的用于园林果实采摘的智能机械装置.pdf
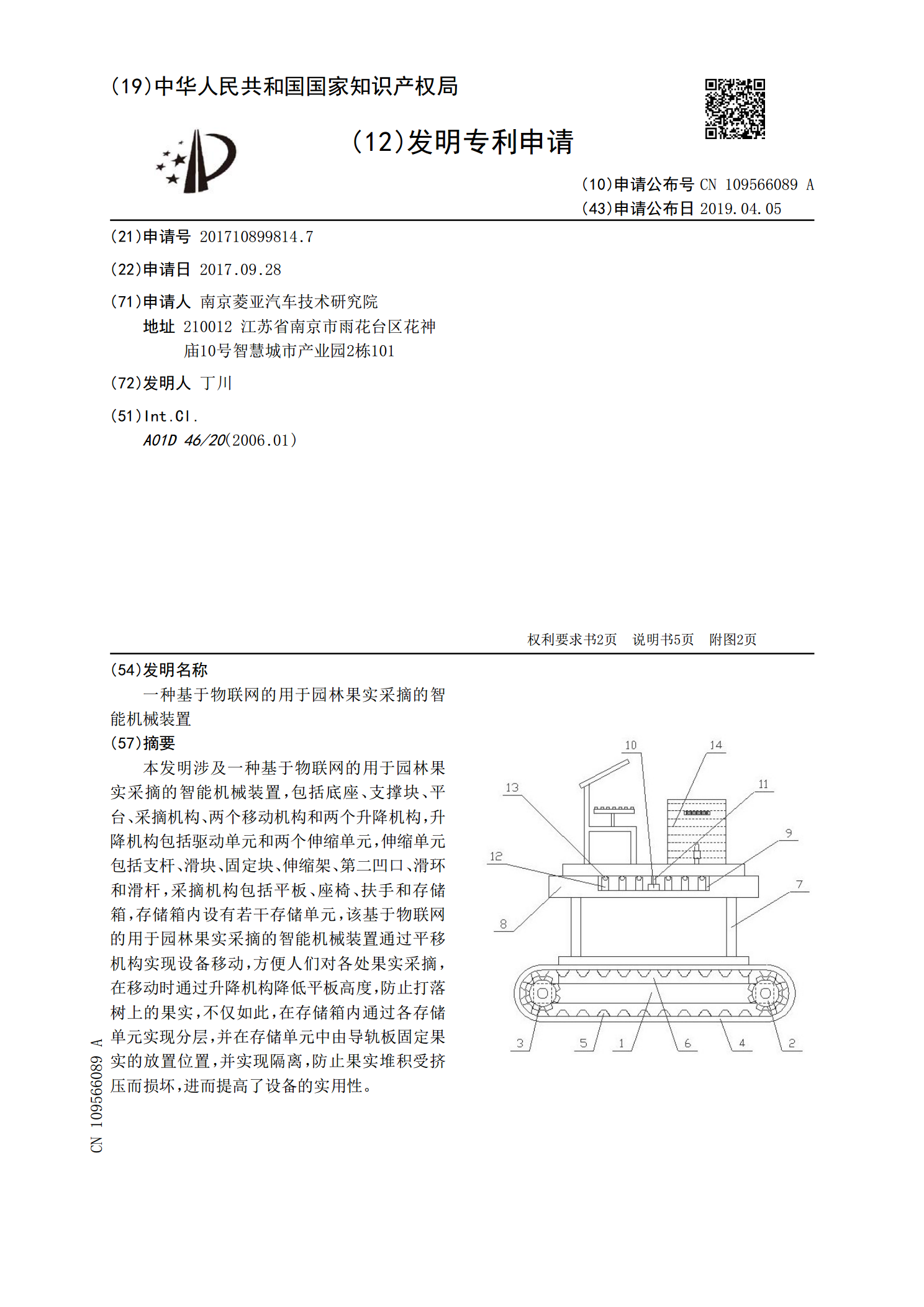
本发明涉及一种基于物联网的用于园林果实采摘的智能机械装置,包括底座、支撑块、平台、采摘机构、两个移动机构和两个升降机构,升降机构包括驱动单元和两个伸缩单元,伸缩单元包括支杆、滑块、固定块、伸缩架、第二凹口、滑环和滑杆,采摘机构包括平板、座椅、扶手和存储箱,存储箱内设有若干存储单元,该基于物联网的用于园林果实采摘的智能机械装置通过平移机构实现设备移动,方便人们对各处果实采摘,在移动时通过升降机构降低平板高度,防止打落树上的果实,不仅如此,在存储箱内通过各存储单元实现分层,并在存储单元中由导轨板固定果实的放置

一种基于物联网的用于果实采摘的智能无人机.pdf
本发明涉及一种基于物联网的用于果实采摘的智能无人机,包括主体、发电机构、飞行机构和采摘机构,采摘机构包括角度调节组件、剪枝组件和收集组件,角度调节组件包括第三电机、第三驱动轴、转盘和固定杆,剪枝组件包括第四电机、第四驱动轴、伸缩单元、复位弹簧和两个刀片,收集组件包括收集篮和嵌入杆,该基于物联网的用于果实采摘的智能无人机中,通过角度调节组件实现了对各个方向的果实进行采摘,通过剪枝组件实现了对果实的安全可靠的采摘,同时通过限位单元与限位槽匹配,实现了收集篮的易拆装的特点,提高了无人机的实用性。
一种基于物联网的智能果实采摘机及其使用方法.pdf
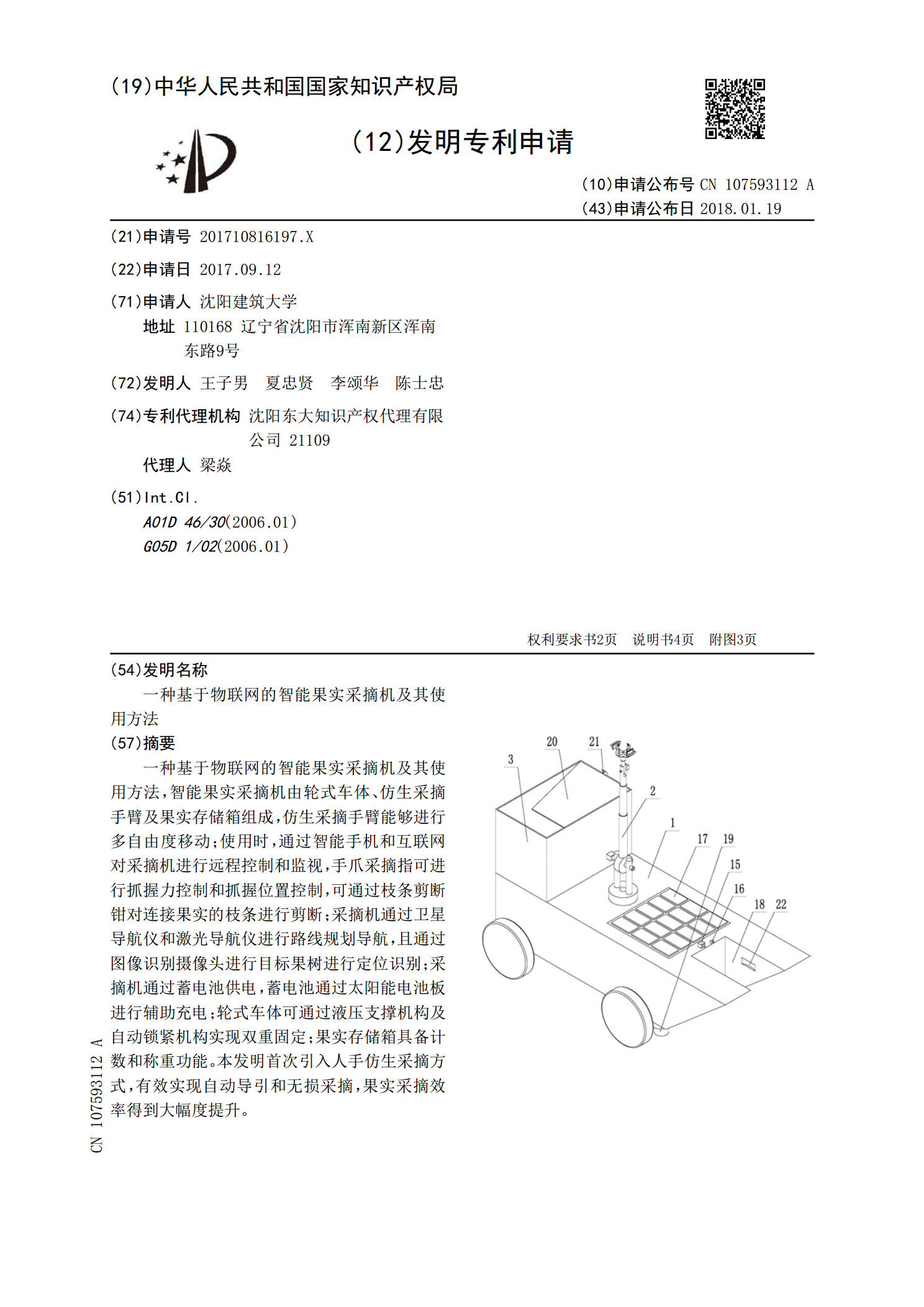
一种基于物联网的智能果实采摘机及其使用方法,智能果实采摘机由轮式车体、仿生采摘手臂及果实存储箱组成,仿生采摘手臂能够进行多自由度移动;使用时,通过智能手机和互联网对采摘机进行远程控制和监视,手爪采摘指可进行抓握力控制和抓握位置控制,可通过枝条剪断钳对连接果实的枝条进行剪断;采摘机通过卫星导航仪和激光导航仪进行路线规划导航,且通过图像识别摄像头进行目标果树进行定位识别;采摘机通过蓄电池供电,蓄电池通过太阳能电池板进行辅助充电;轮式车体可通过液压支撑机构及自动锁紧机构实现双重固定;果实存储箱具备计数和称重功能
一种基于物联网的用于搬运的智能机器人.pdf
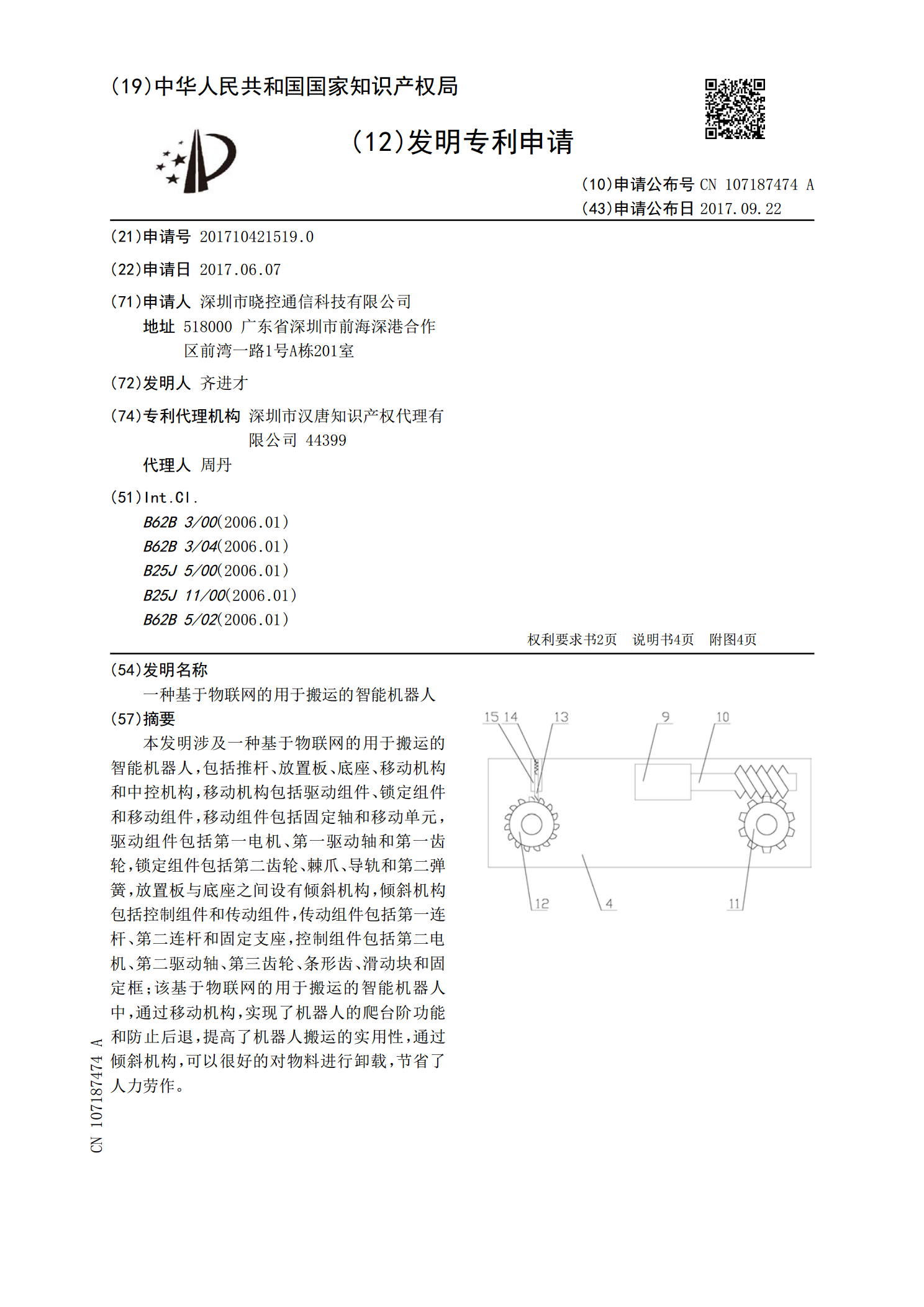
本发明涉及一种基于物联网的用于搬运的智能机器人,包括推杆、放置板、底座、移动机构和中控机构,移动机构包括驱动组件、锁定组件和移动组件,移动组件包括固定轴和移动单元,驱动组件包括第一电机、第一驱动轴和第一齿轮,锁定组件包括第二齿轮、棘爪、导轨和第二弹簧,放置板与底座之间设有倾斜机构,倾斜机构包括控制组件和传动组件,传动组件包括第一连杆、第二连杆和固定支座,控制组件包括第二电机、第二驱动轴、第三齿轮、条形齿、滑动块和固定框;该基于物联网的用于搬运的智能机器人中,通过移动机构,实现了机器人的爬台阶功能和防止后退