
一种智能车载标签AGV控制系统及其控制方法.pdf

小宏****aa

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能车载标签AGV控制系统及其控制方法.pdf
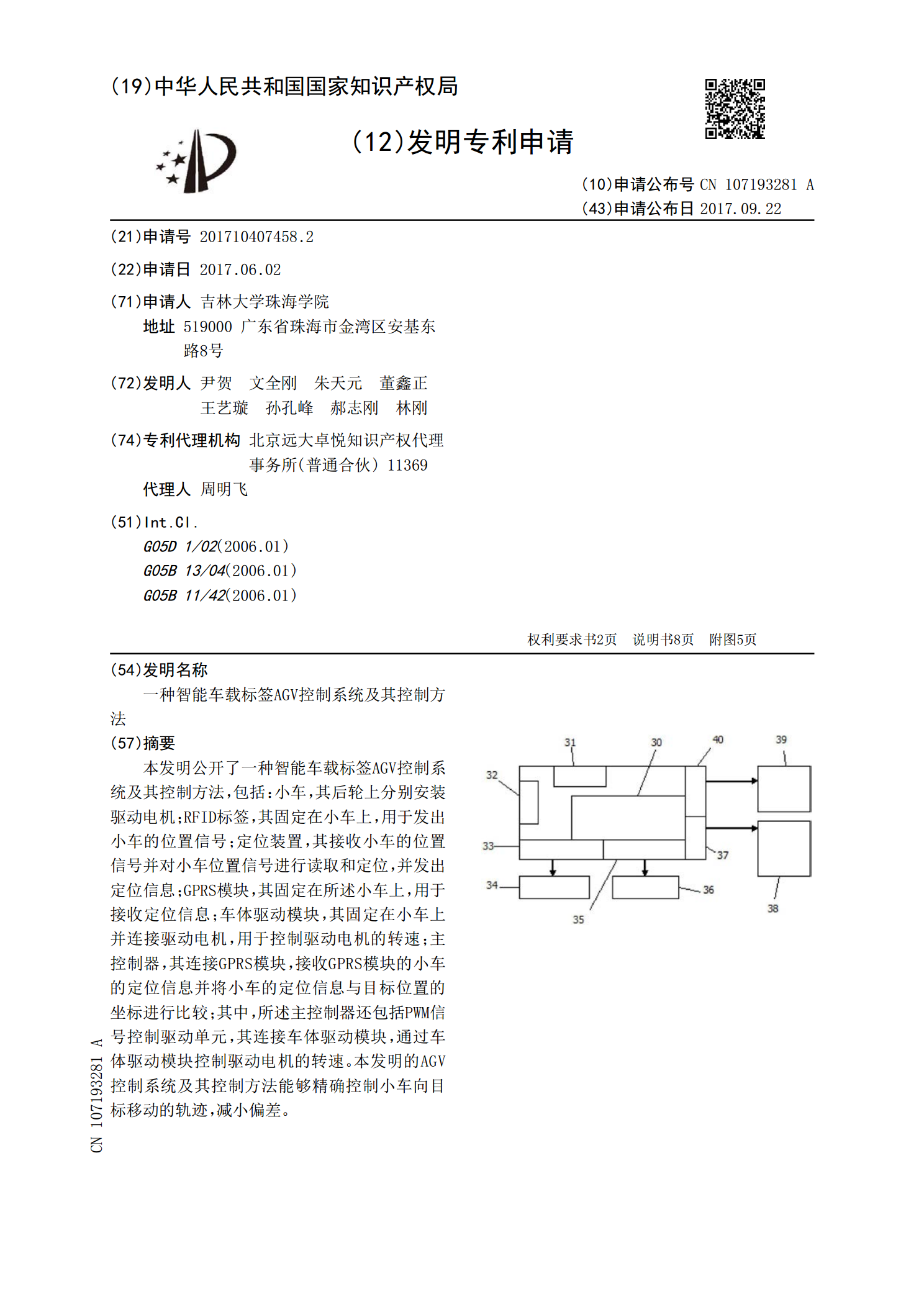
本发明公开了一种智能车载标签AGV控制系统及其控制方法,包括:小车,其后轮上分别安装驱动电机;RFID标签,其固定在小车上,用于发出小车的位置信号;定位装置,其接收小车的位置信号并对小车位置信号进行读取和定位,并发出定位信息;GPRS模块,其固定在所述小车上,用于接收定位信息;车体驱动模块,其固定在小车上并连接驱动电机,用于控制驱动电机的转速;主控制器,其连接GPRS模块,接收GPRS模块的小车的定位信息并将小车的定位信息与目标位置的坐标进行比较;其中,所述主控制器还包括PWM信号控制驱动单元,其连接车体
车载空调智能控制系统及其控制方法.pdf
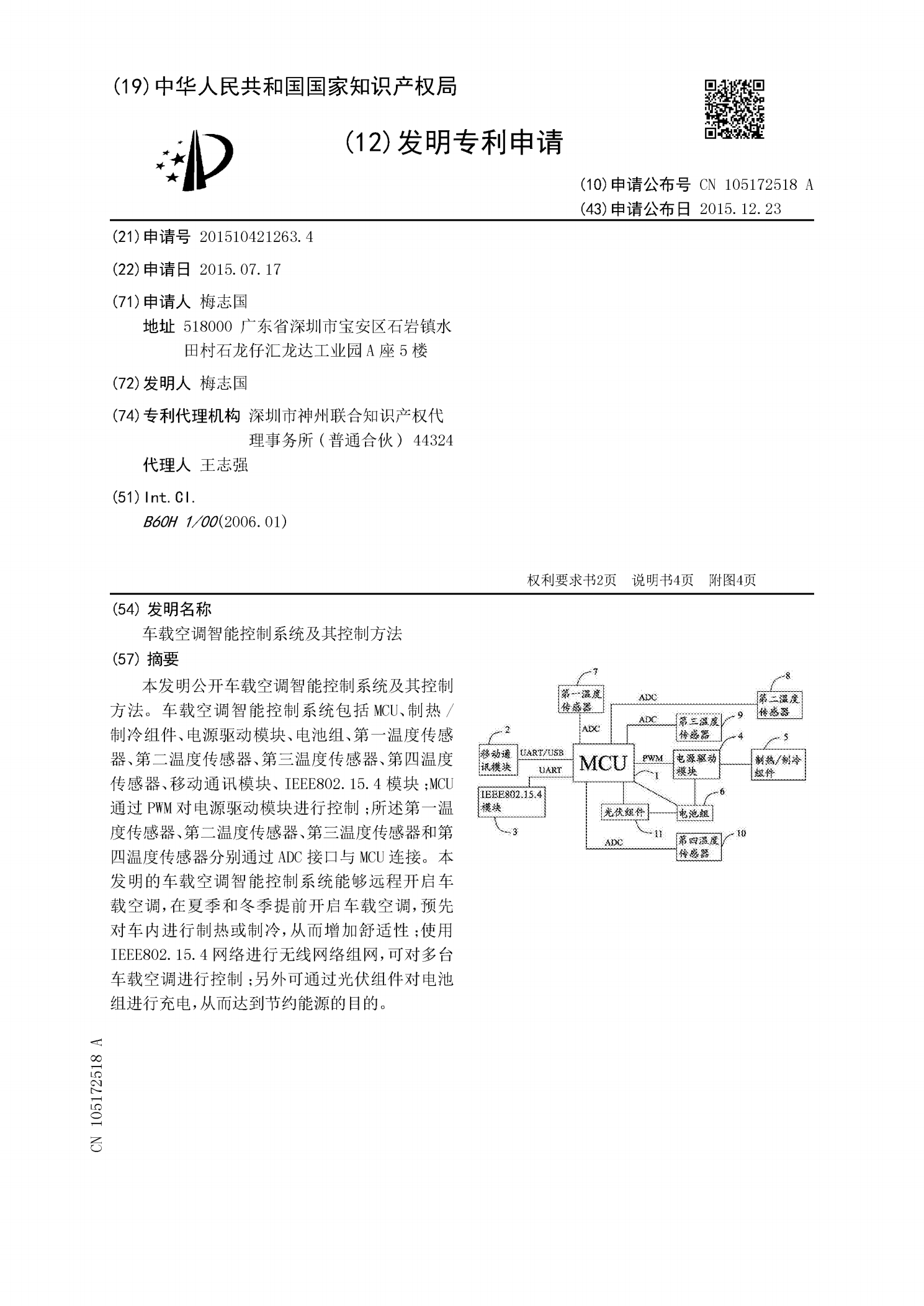
本发明公开车载空调智能控制系统及其控制方法。车载空调智能控制系统包括MCU、制热/制冷组件、电源驱动模块、电池组、第一温度传感器、第二温度传感器、第三温度传感器、第四温度传感器、移动通讯模块、IEEE802.15.4模块;MCU通过PWM对电源驱动模块进行控制;所述第一温度传感器、第二温度传感器、第三温度传感器和第四温度传感器分别通过ADC接口与MCU连接。本发明的车载空调智能控制系统能够远程开启车载空调,在夏季和冬季提前开启车载空调,预先对车内进行制热或制冷,从而增加舒适性;使用IEEE802.15.4

一种简易AGV车载控制系统.pdf
本发明公开一种简易AGV(Automatic?Guided?Vehicle,自动导航物流运载车以下简称AGV)车载控制系统。其包括车身结构参数设置、迹线跟踪参数设置、路标标签管理、对外交互IO管理、数据通信以及物流运载车行驶监控单元。其特征在于:物流运载车行驶监控单元,随车小地图实时指示物流运载车当前位置;车身结构参数或引导线环境等改变可直接通过人机交互界面进行修改;通过微调迹线跟踪参数,使得物流运载车调试出更为理想平稳的效果;路标标签其功能定义,可直接由路标标签管理界面进行修改设置与观察;对外IO接口功
一种AGV智能小车及其控制方法.pdf
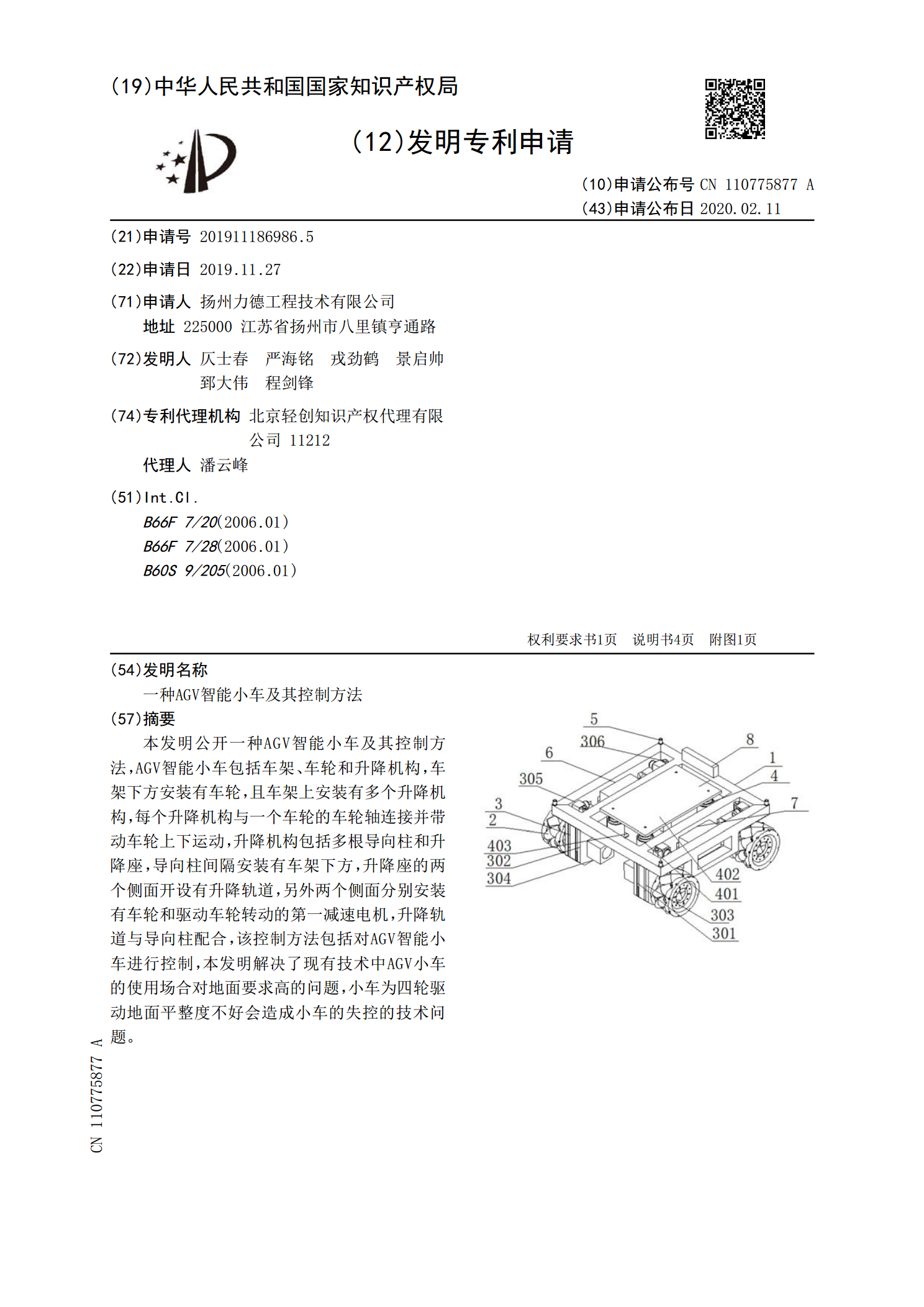
本发明公开一种AGV智能小车及其控制方法,AGV智能小车包括车架、车轮和升降机构,车架下方安装有车轮,且车架上安装有多个升降机构,每个升降机构与一个车轮的车轮轴连接并带动车轮上下运动,升降机构包括多根导向柱和升降座,导向柱间隔安装有车架下方,升降座的两个侧面开设有升降轨道,另外两个侧面分别安装有车轮和驱动车轮转动的第一减速电机,升降轨道与导向柱配合,该控制方法包括对AGV智能小车进行控制,本发明解决了现有技术中AGV小车的使用场合对地面要求高的问题,小车为四轮驱动地面平整度不好会造成小车的失控的技术问题。

一种渣土车远程管理车载智能控制系统及其控制方法.pdf
一种渣土车远程管理车载智能控制系统及其控制方法,其中的控制系统包括仪表IC、发动机控制器EECU、车载终端控制器和车载智能控制器,车载智能控制器分别与仪表IC、发动机控制器EECU和车载终端控制器相连接;其中的控制方法实现了对控制系统的控制。实现了仪表IC、发动机控制器EECU与第三方厂家提供的车载终端控制器的物理隔离,杜绝了市面上质量参差不齐的车载终端控制器产品直接接入原车CAN总线后对正常CAN通讯的影响。