
轮式机器人驱动电机的控制方法、装置及轮式机器人.pdf

努力****振宇

1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮式机器人驱动电机的控制方法、装置及轮式机器人.pdf
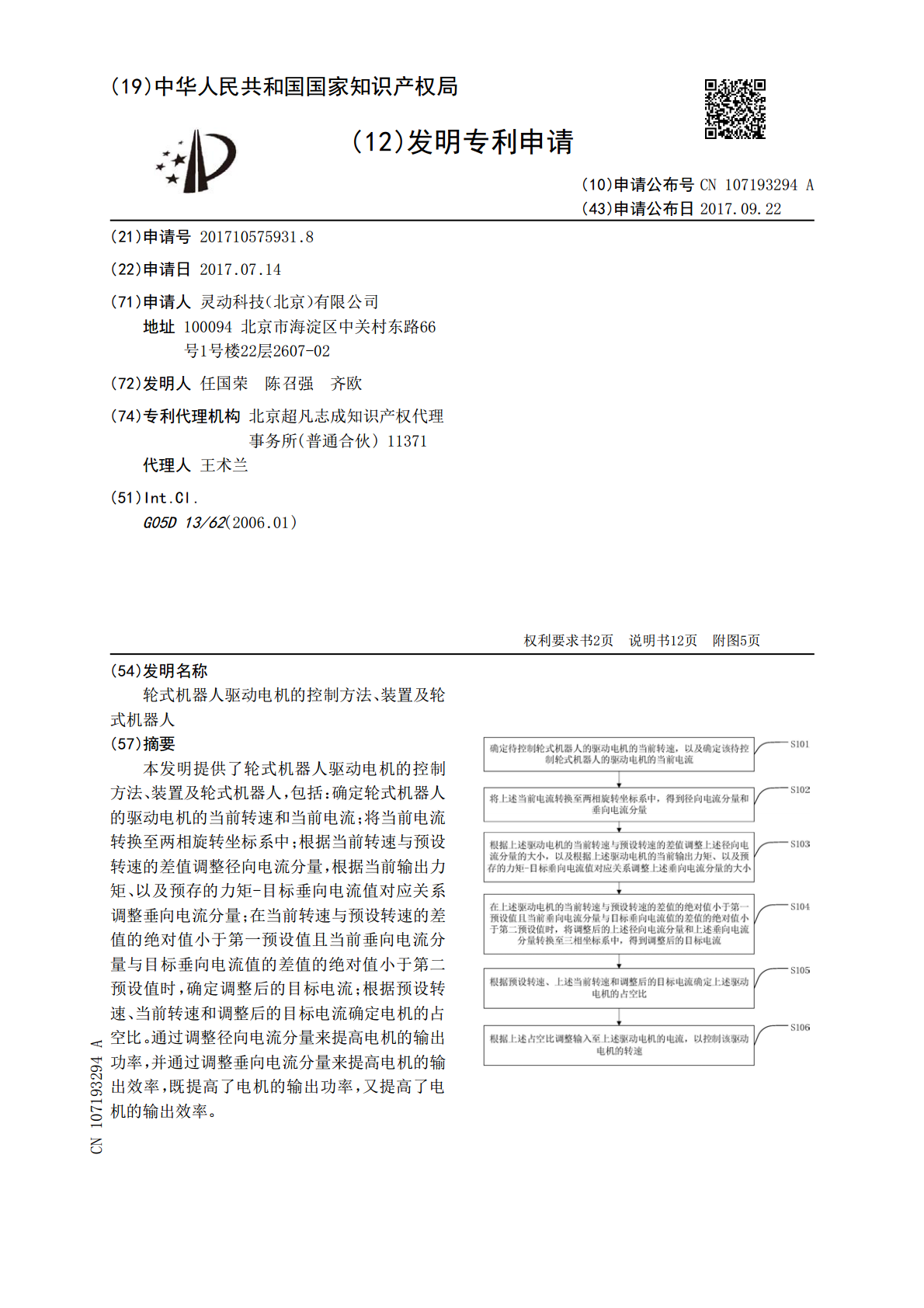
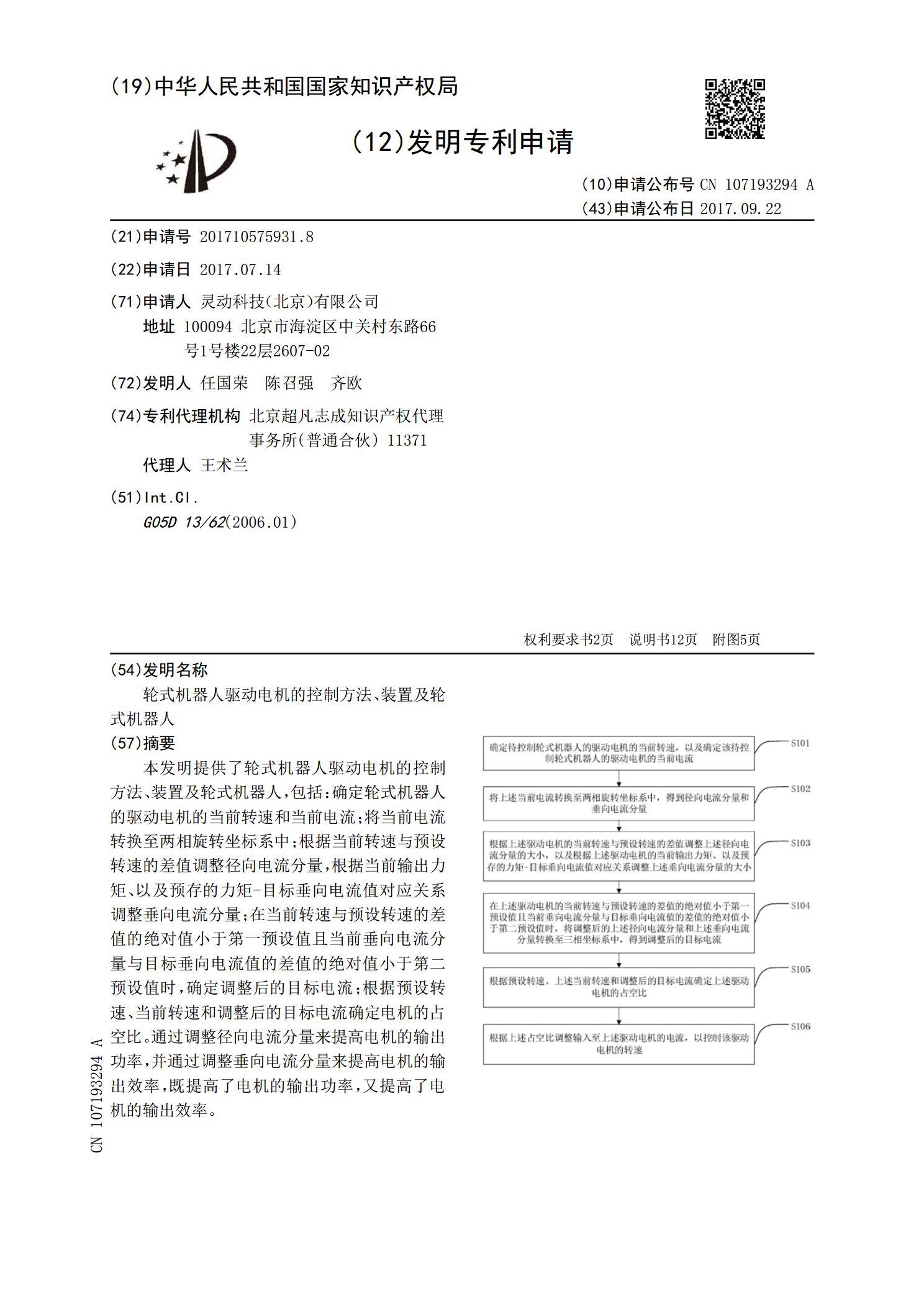
本发明提供了轮式机器人驱动电机的控制方法、装置及轮式机器人,包括:确定轮式机器人的驱动电机的当前转速和当前电流;将当前电流转换至两相旋转坐标系中;根据当前转速与预设转速的差值调整径向电流分量,根据当前输出力矩、以及预存的力矩‑目标垂向电流值对应关系调整垂向电流分量;在当前转速与预设转速的差值的绝对值小于第一预设值且当前垂向电流分量与目标垂向电流值的差值的绝对值小于第二预设值时,确定调整后的目标电流;根据预设转速、当前转速和调整后的目标电流确定电机的占空比。通过调整径向电流分量来提高电机的输出功率,并通过调

轮式机器人电机驱动系统设计.doc
..整理doc整理doc.整理doc本科毕业论文(设计、创作)题目:轮式机器人电机驱动系统设计学生姓名:学号:081002100所在院系:专业:电气工程及其自动化入学时间:2010年9导师姓名:职称/学位:副教授/硕士导师所在单位:完成时间:2014年5月安徽三联学院教务处制轮式机器人驱动系统设计摘要:随着社会的发展,机器人逐渐受到了人们的重视,可移动轮式机器人的研究具有极其重要的意义。其关键的问题就是要解决机器人在复杂环境下系统的正常运行和控制,因此轮式机器人的驱动系统显得尤为重要。本文设计了一款智能轮
轮式驱动机器人.pdf
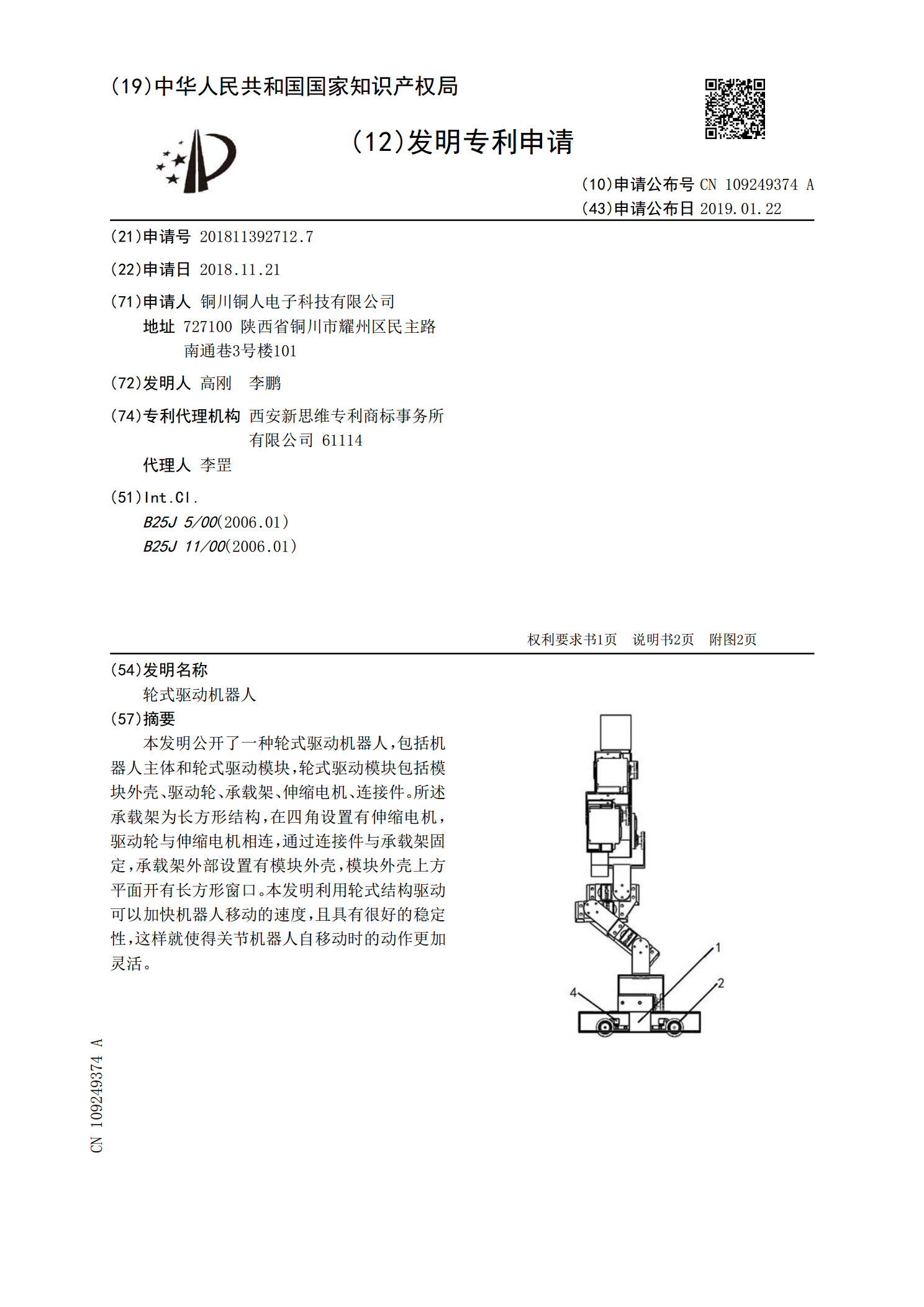
本发明公开了一种轮式驱动机器人,包括机器人主体和轮式驱动模块,轮式驱动模块包括模块外壳、驱动轮、承载架、伸缩电机、连接件。所述承载架为长方形结构,在四角设置有伸缩电机,驱动轮与伸缩电机相连,通过连接件与承载架固定,承载架外部设置有模块外壳,模块外壳上方平面开有长方形窗口。本发明利用轮式结构驱动可以加快机器人移动的速度,且具有很好的稳定性,这样就使得关节机器人自移动时的动作更加灵活。
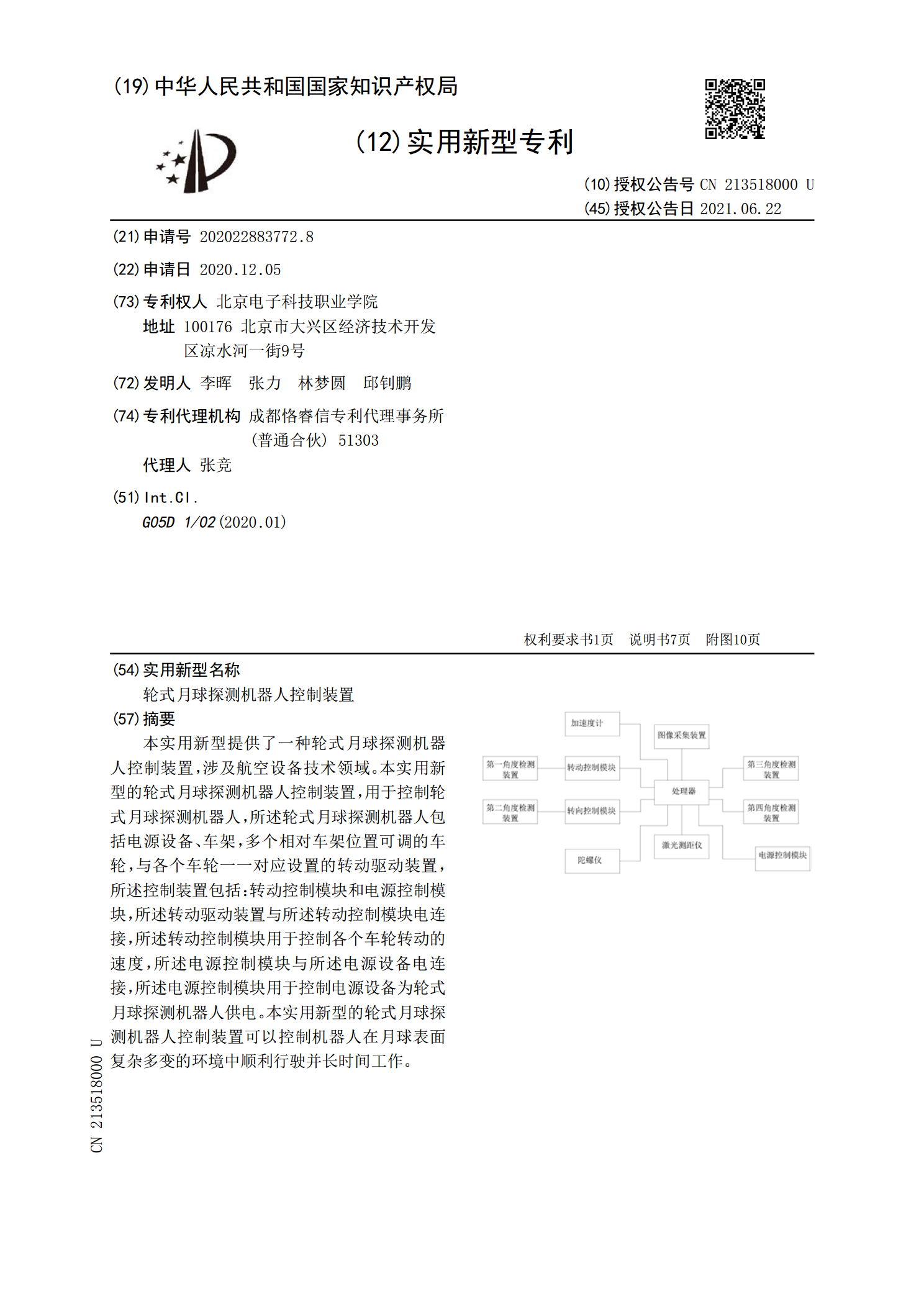
轮式月球探测机器人控制装置.pdf
本实用新型提供了一种轮式月球探测机器人控制装置,涉及航空设备技术领域。本实用新型的轮式月球探测机器人控制装置,用于控制轮式月球探测机器人,所述轮式月球探测机器人包括电源设备、车架,多个相对车架位置可调的车轮,与各个车轮一一对应设置的转动驱动装置,所述控制装置包括:转动控制模块和电源控制模块,所述转动驱动装置与所述转动控制模块电连接,所述转动控制模块用于控制各个车轮转动的速度,所述电源控制模块与所述电源设备电连接,所述电源控制模块用于控制电源设备为轮式月球探测机器人供电。本实用新型的轮式月球探测机器人控制装
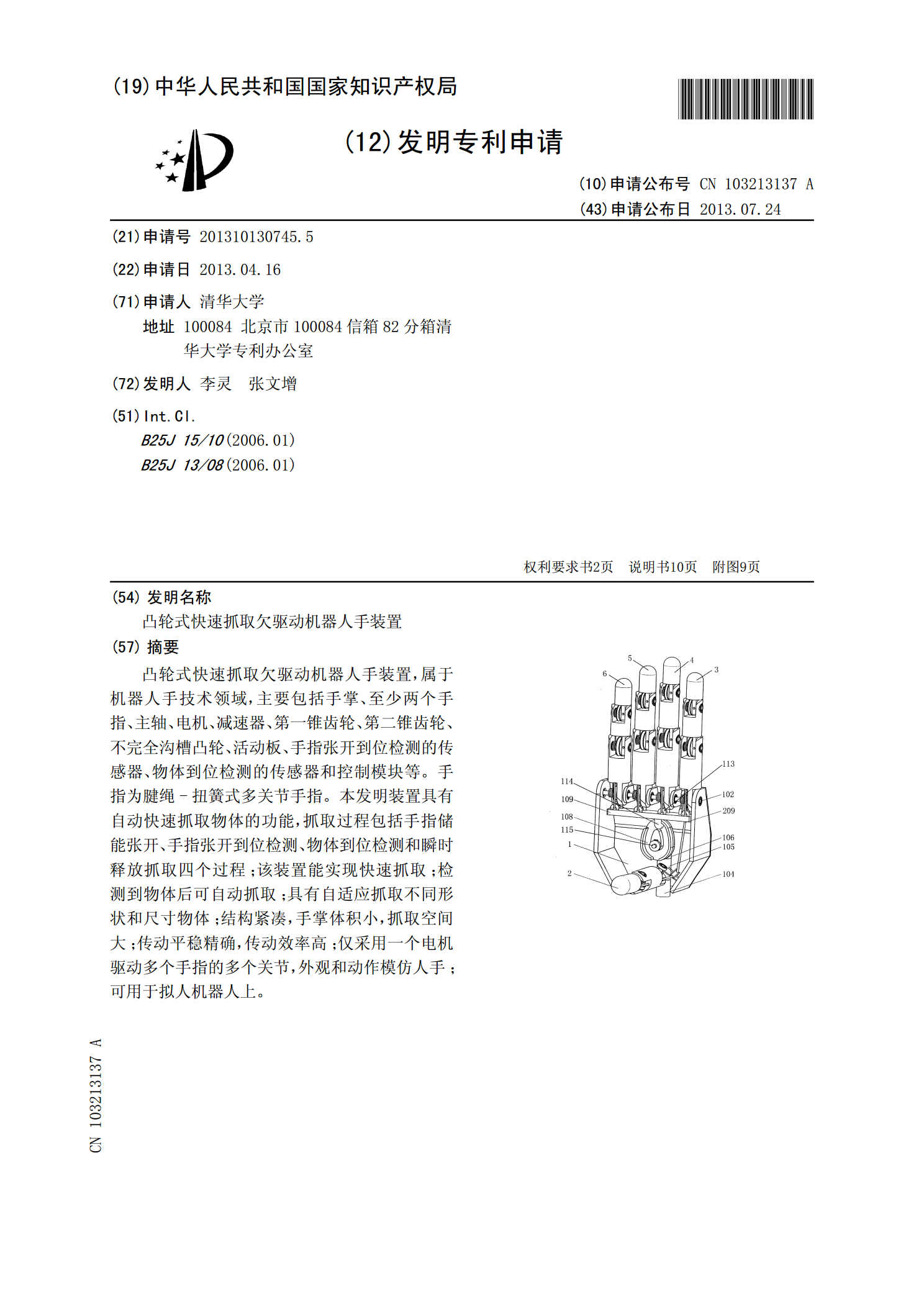
凸轮式快速抓取欠驱动机器人手装置.pdf
凸轮式快速抓取欠驱动机器人手装置,属于机器人手技术领域,主要包括手掌、至少两个手指、主轴、电机、减速器、第一锥齿轮、第二锥齿轮、不完全沟槽凸轮、活动板、手指张开到位检测的传感器、物体到位检测的传感器和控制模块等。手指为腱绳-扭簧式多关节手指。本发明装置具有自动快速抓取物体的功能,抓取过程包括手指储能张开、手指张开到位检测、物体到位检测和瞬时释放抓取四个过程;该装置能实现快速抓取;检测到物体后可自动抓取;具有自适应抓取不同形状和尺寸物体;结构紧凑,手掌体积小,抓取空间大;传动平稳精确,传动效率高;仅采用一个