
自主行驶装置.pdf

一吃****成益


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自主行驶装置.pdf
自主行驶装置具备:车轮;装置主体;动力源,其设于装置主体内的装置主体的一端部侧,驱动车轮而使装置主体自主行驶;电池,其用于对动力源供应电力;以及收纳部,其用于将电池从装置主体的另一端部收纳到装置主体内的装置主体的中央部分。由此,能容易地进行电池的更换,能通过考虑了装置主体的重心的电池的配置进行稳定的自主行驶。

自主行驶型清扫装置.pdf
提供一种即使在清扫对象即被清扫面存在起伏的情况下,也能够通过防止吸气喷嘴与起伏的接触从而防止异常转弯或翻倒的自主行驶型清扫装置。地面清扫装置(10)具有支撑收集盒(16)的支撑架(17),支撑架(17)以能够向上下方向(D1)移动的方式被支撑。另外,支撑架(17)上轴支撑有旋转滚轮(60)。在地面(23)上存在凸凹、高度差或起伏等的情况下,在地面清扫装置(10)的自主行驶过程中,在吸气喷嘴(18)与起伏等接触前,旋转滚轮(60)先与起伏等接触。当旋转滚轮(60)接触起伏等时,旋转滚轮(60)被施加向上方的
车辆行驶控制装置及自主驾驶控制方法.pdf
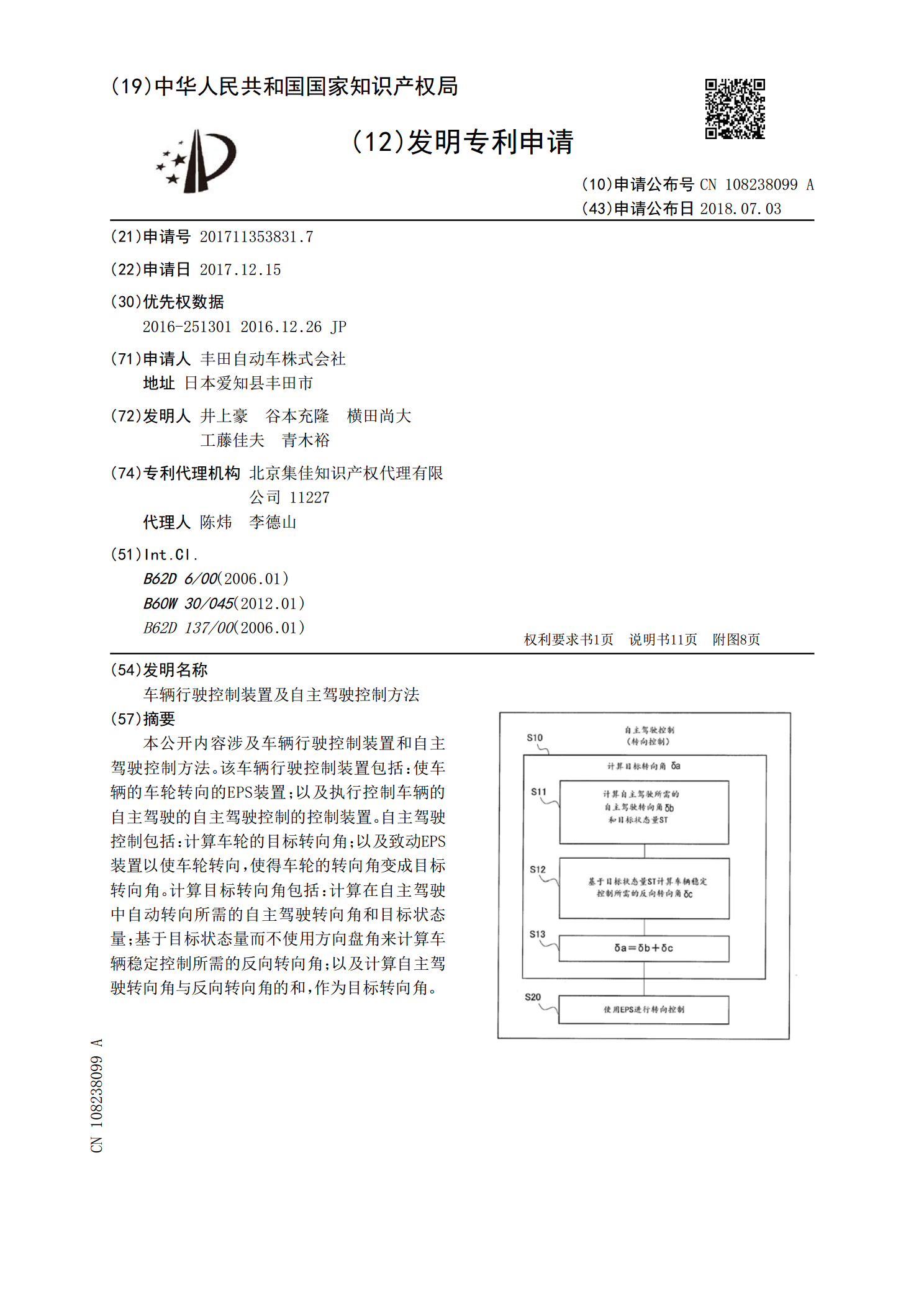
本公开内容涉及车辆行驶控制装置和自主驾驶控制方法。该车辆行驶控制装置包括:使车辆的车轮转向的EPS装置;以及执行控制车辆的自主驾驶的自主驾驶控制的控制装置。自主驾驶控制包括:计算车轮的目标转向角;以及致动EPS装置以使车轮转向,使得车轮的转向角变成目标转向角。计算目标转向角包括:计算在自主驾驶中自动转向所需的自主驾驶转向角和目标状态量;基于目标状态量而不使用方向盘角来计算车辆稳定控制所需的反向转向角;以及计算自主驾驶转向角与反向转向角的和,作为目标转向角。
自主行驶控制设备、自主行驶控制系统和自主行驶控制方法.pdf
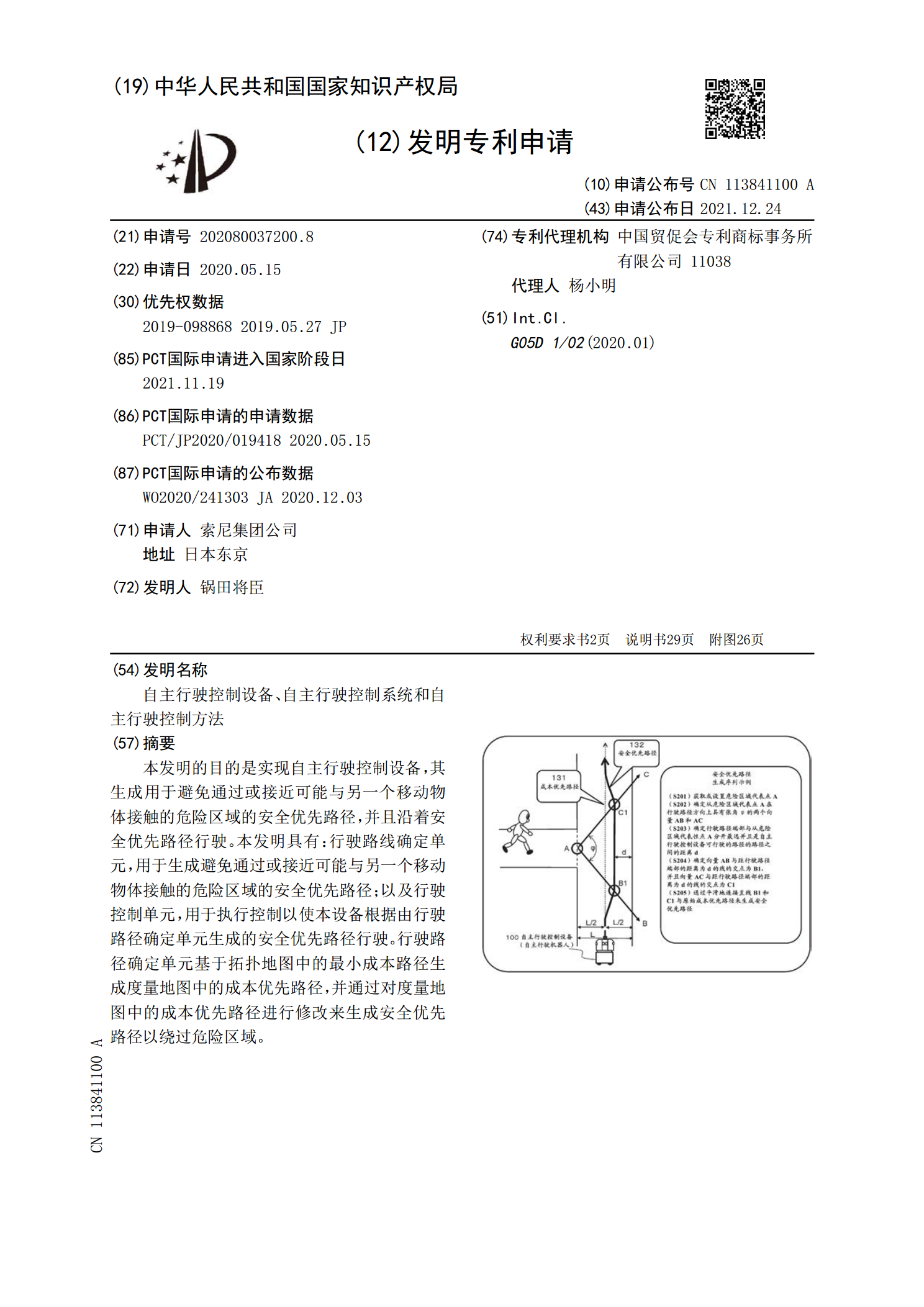
本发明的目的是实现自主行驶控制设备,其生成用于避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径,并且沿着安全优先路径行驶。本发明具有:行驶路线确定单元,用于生成避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径;以及行驶控制单元,用于执行控制以使本设备根据由行驶路径确定单元生成的安全优先路径行驶。行驶路径确定单元基于拓扑地图中的最小成本路径生成度量地图中的成本优先路径,并通过对度量地图中的成本优先路径进行修改来生成安全优先路径以绕过危险区域。
自主行驶型吸尘器以及带驱动装置的滚轮.pdf
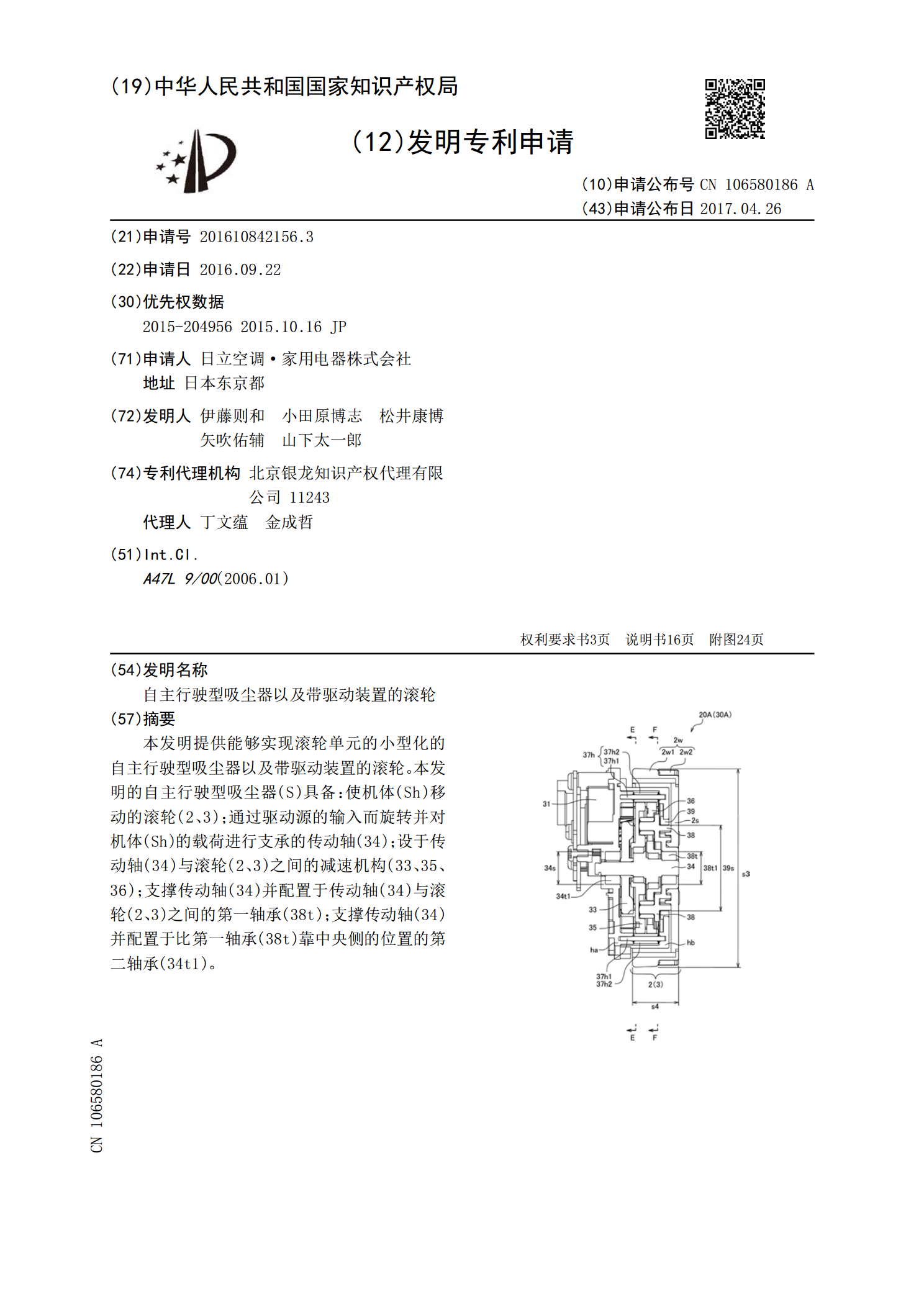
本发明提供能够实现滚轮单元的小型化的自主行驶型吸尘器以及带驱动装置的滚轮。本发明的自主行驶型吸尘器(S)具备:使机体(Sh)移动的滚轮(2、3);通过驱动源的输入而旋转并对机体(Sh)的载荷进行支承的传动轴(34);设于传动轴(34)与滚轮(2、3)之间的减速机构(33、35、36);支撑传动轴(34)并配置于传动轴(34)与滚轮(2、3)之间的第一轴承(38t);支撑传动轴(34)并配置于比第一轴承(38t)靠中央侧的位置的第二轴承(34t1)。