
自主行驶控制设备、自主行驶控制系统和自主行驶控制方法.pdf

猫巷****傲柏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共58页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自主行驶控制设备、自主行驶控制系统和自主行驶控制方法.pdf
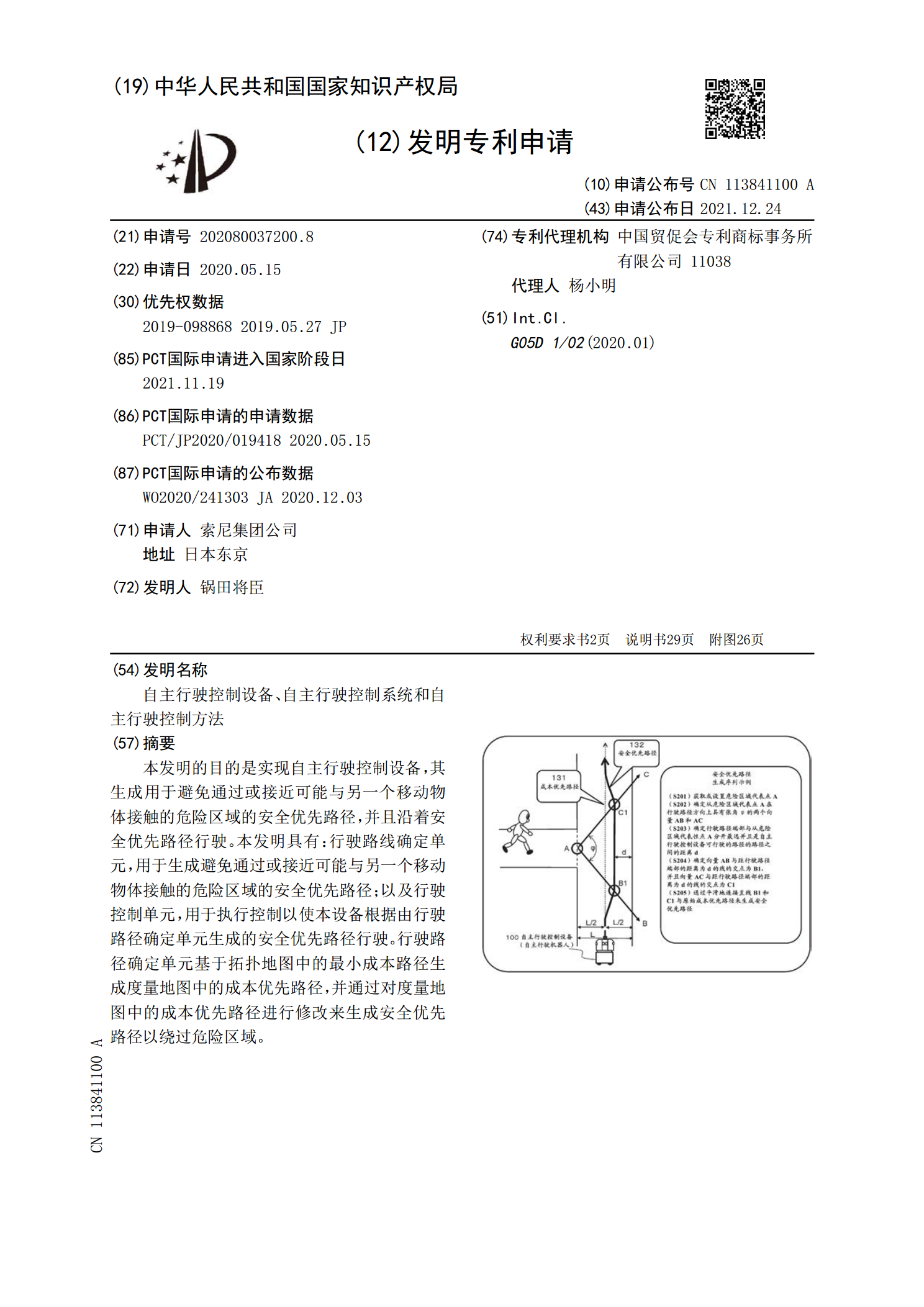
本发明的目的是实现自主行驶控制设备,其生成用于避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径,并且沿着安全优先路径行驶。本发明具有:行驶路线确定单元,用于生成避免通过或接近可能与另一个移动物体接触的危险区域的安全优先路径;以及行驶控制单元,用于执行控制以使本设备根据由行驶路径确定单元生成的安全优先路径行驶。行驶路径确定单元基于拓扑地图中的最小成本路径生成度量地图中的成本优先路径,并通过对度量地图中的成本优先路径进行修改来生成安全优先路径以绕过危险区域。
车辆行驶控制装置及自主驾驶控制方法.pdf
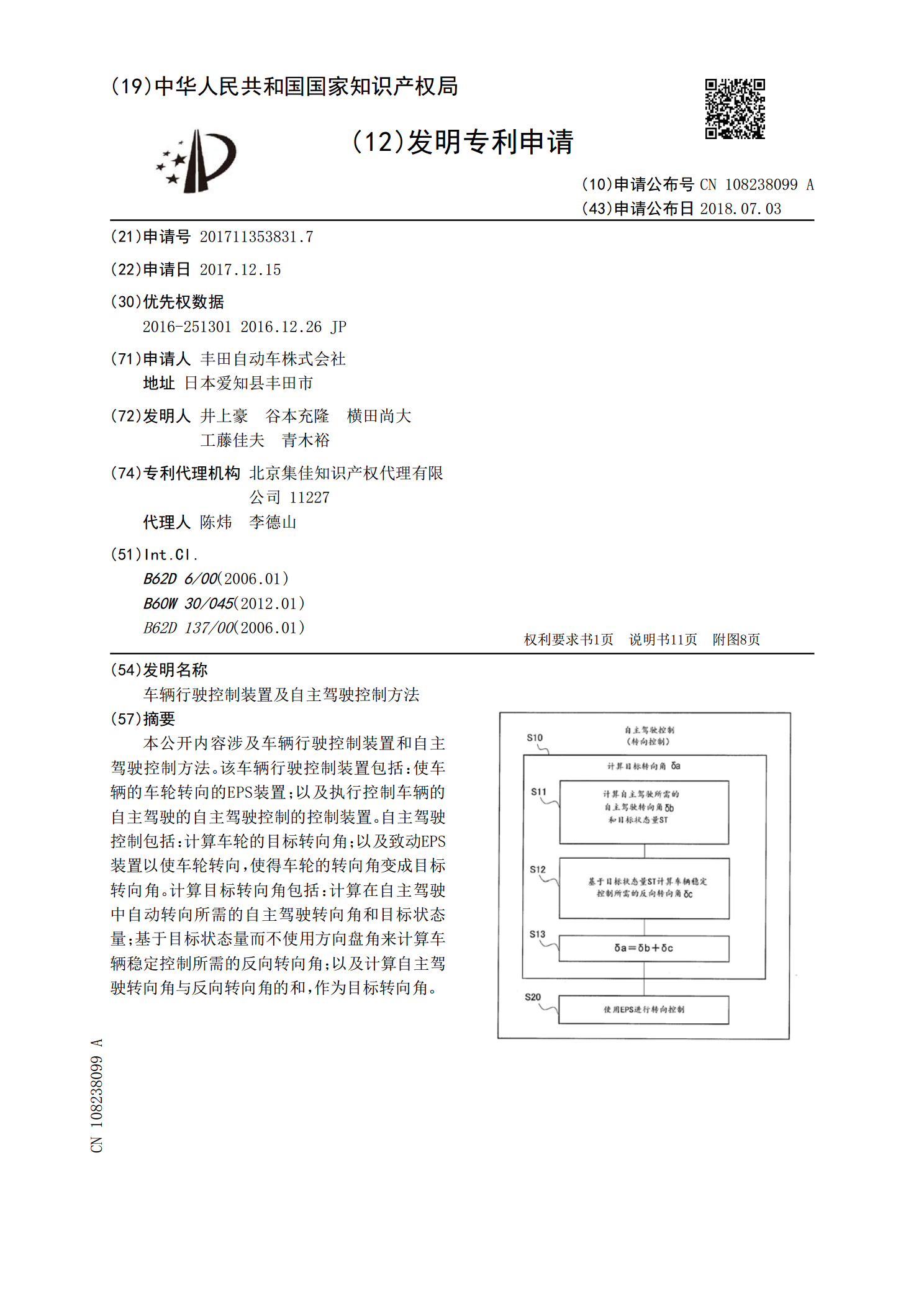
本公开内容涉及车辆行驶控制装置和自主驾驶控制方法。该车辆行驶控制装置包括:使车辆的车轮转向的EPS装置;以及执行控制车辆的自主驾驶的自主驾驶控制的控制装置。自主驾驶控制包括:计算车轮的目标转向角;以及致动EPS装置以使车轮转向,使得车轮的转向角变成目标转向角。计算目标转向角包括:计算在自主驾驶中自动转向所需的自主驾驶转向角和目标状态量;基于目标状态量而不使用方向盘角来计算车辆稳定控制所需的反向转向角;以及计算自主驾驶转向角与反向转向角的和,作为目标转向角。
行驶控制系统和行驶控制方法.pdf
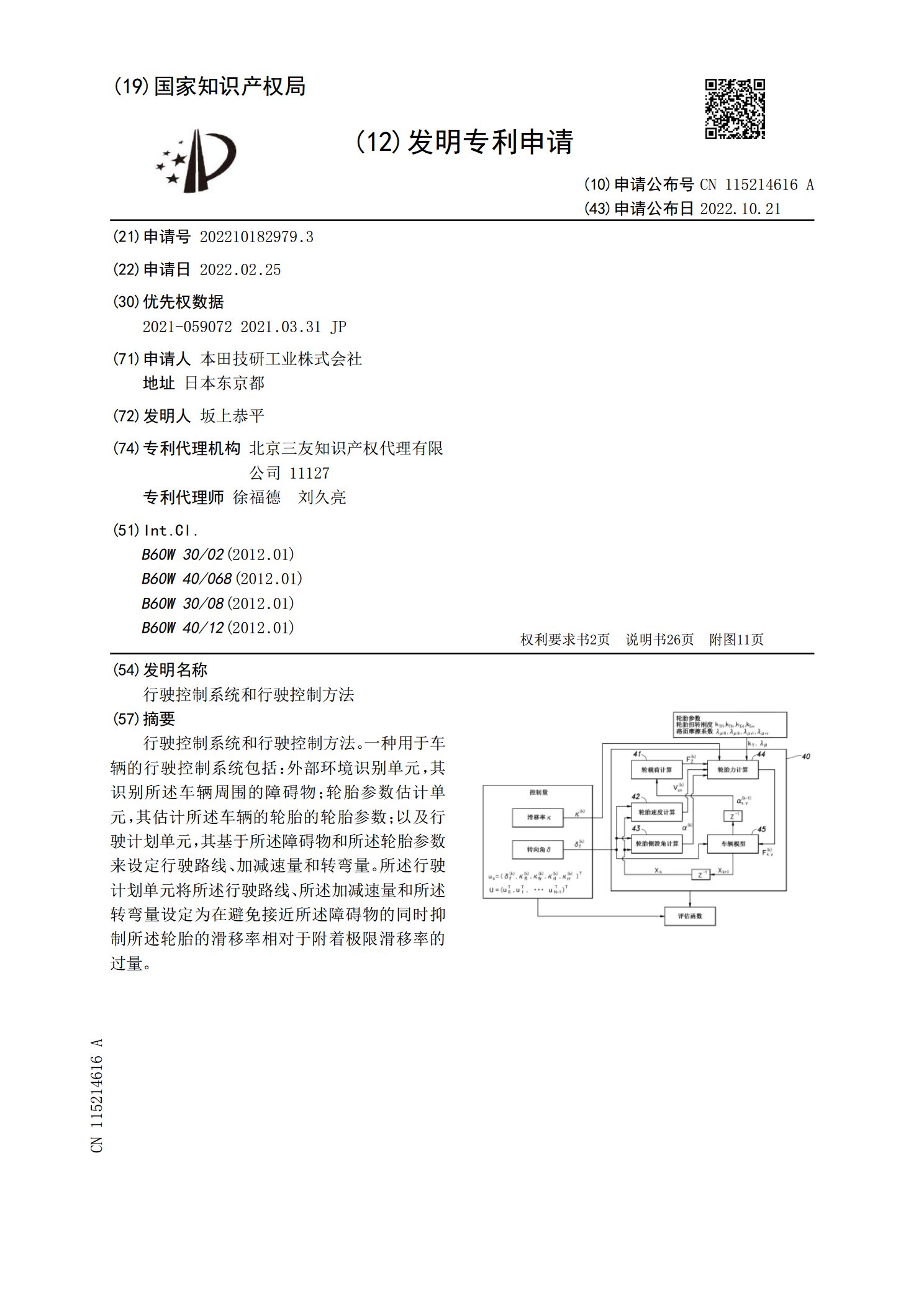
行驶控制系统和行驶控制方法。一种用于车辆的行驶控制系统包括:外部环境识别单元,其识别所述车辆周围的障碍物;轮胎参数估计单元,其估计所述车辆的轮胎的轮胎参数;以及行驶计划单元,其基于所述障碍物和所述轮胎参数来设定行驶路线、加减速量和转弯量。所述行驶计划单元将所述行驶路线、所述加减速量和所述转弯量设定为在避免接近所述障碍物的同时抑制所述轮胎的滑移率相对于附着极限滑移率的过量。

自主行驶装置.pdf
自主行驶装置具备:车轮;装置主体;动力源,其设于装置主体内的装置主体的一端部侧,驱动车轮而使装置主体自主行驶;电池,其用于对动力源供应电力;以及收纳部,其用于将电池从装置主体的另一端部收纳到装置主体内的装置主体的中央部分。由此,能容易地进行电池的更换,能通过考虑了装置主体的重心的电池的配置进行稳定的自主行驶。

地下铲运机自主行驶与避障控制方法研究.docx
地下铲运机自主行驶与避障控制方法研究地下铲运机自主行驶与避障控制方法研究随着工业和矿业的发展,地下开采的需求越来越大。地下铲运机作为地下开采的必要工具,其自主行驶和避障控制方法的研究具有重要意义。本文将首先介绍地下铲运机的自主行驶技术,然后分析避障控制的关键技术和方法,并对其进行研究。一、地下铲运机的自主行驶技术地下铲运机自主行驶技术是指使用传感器等设备,将地下铲运机变为具有自主行驶功能的无人车辆,实现对其自身的协同、定位与导航等智能控制。在这些技术中,定位和导航是最基本的控制任务之一,同时,精确定位支持