
机器人搬运装置.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共53页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人搬运装置.pdf
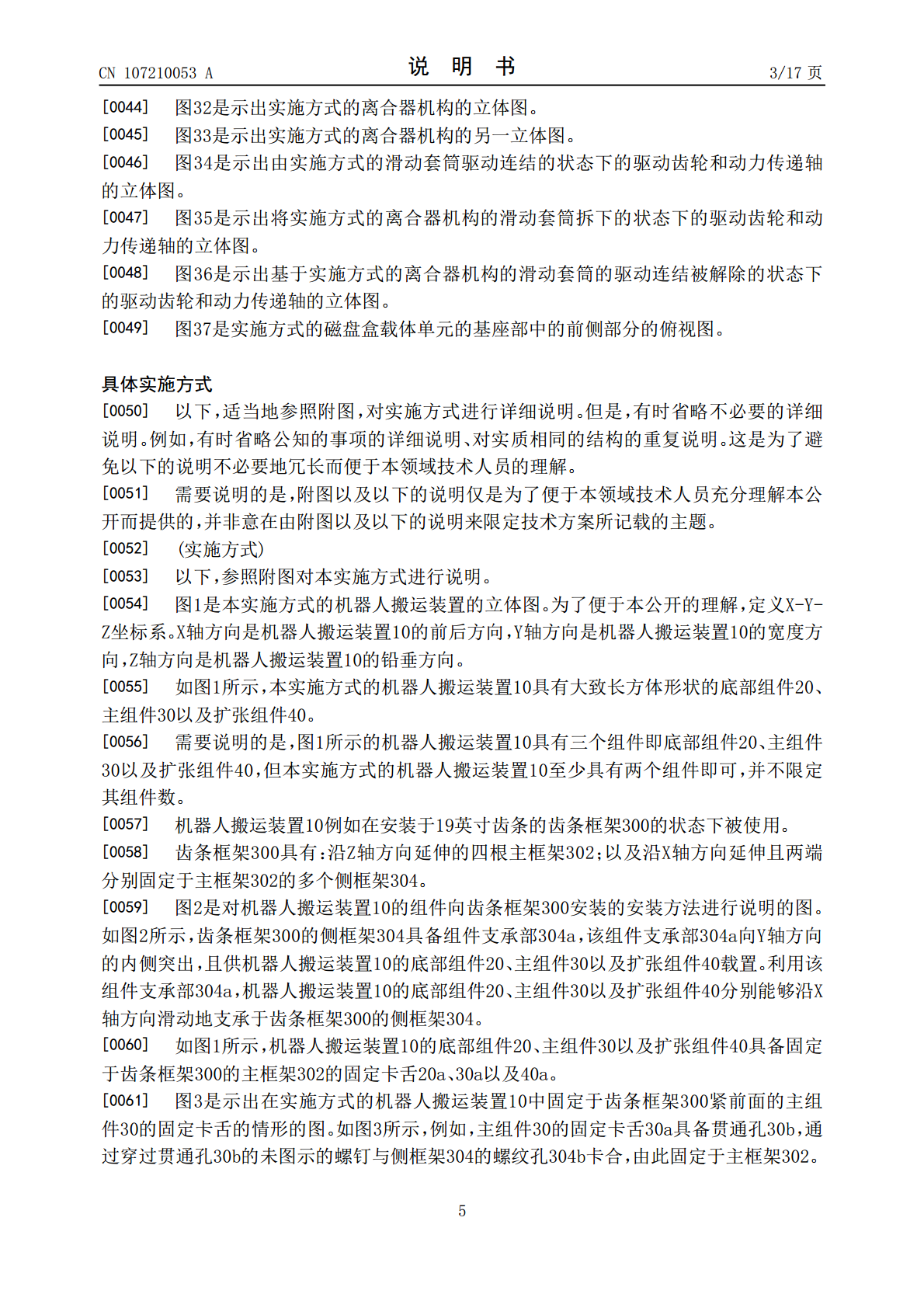
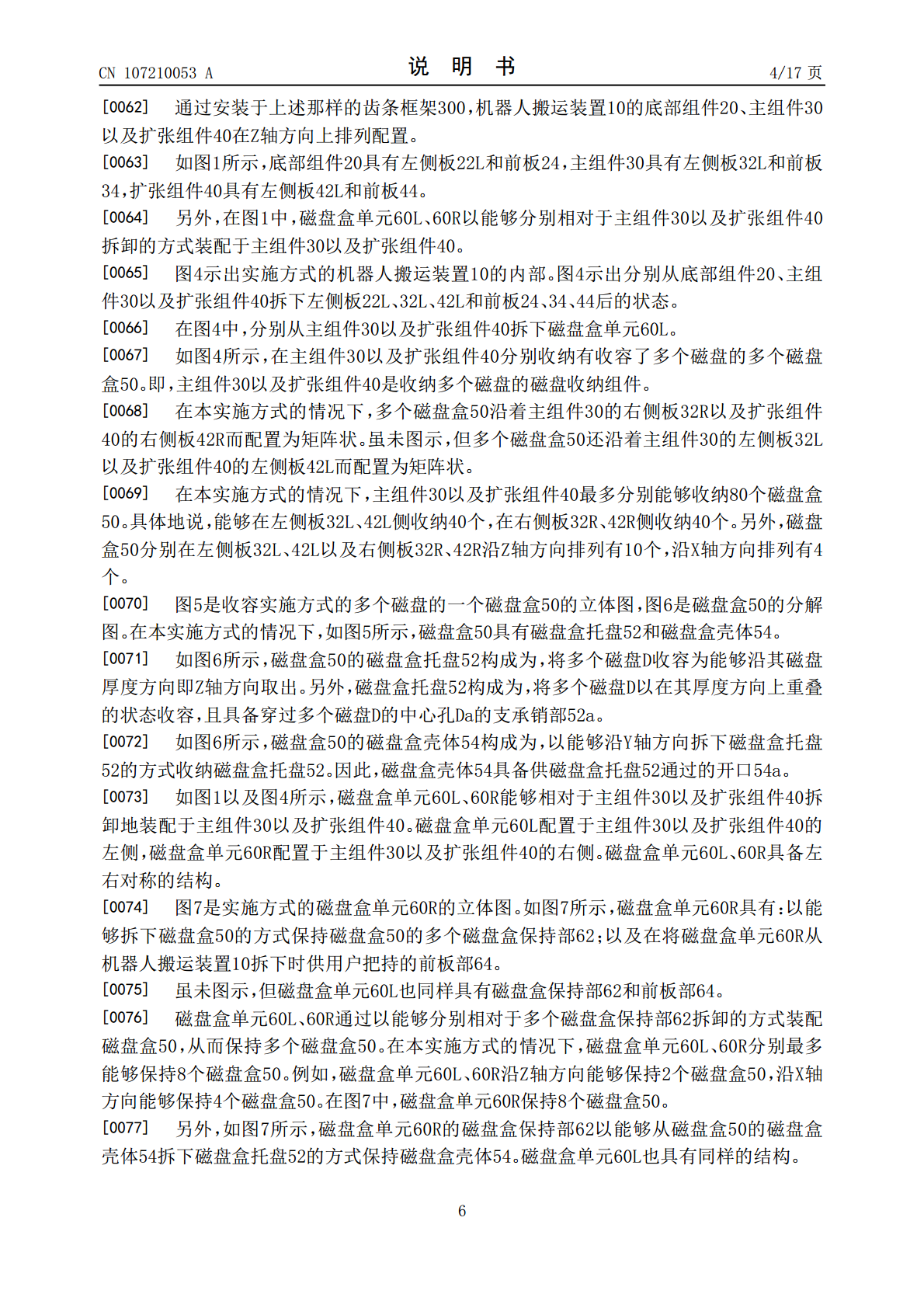
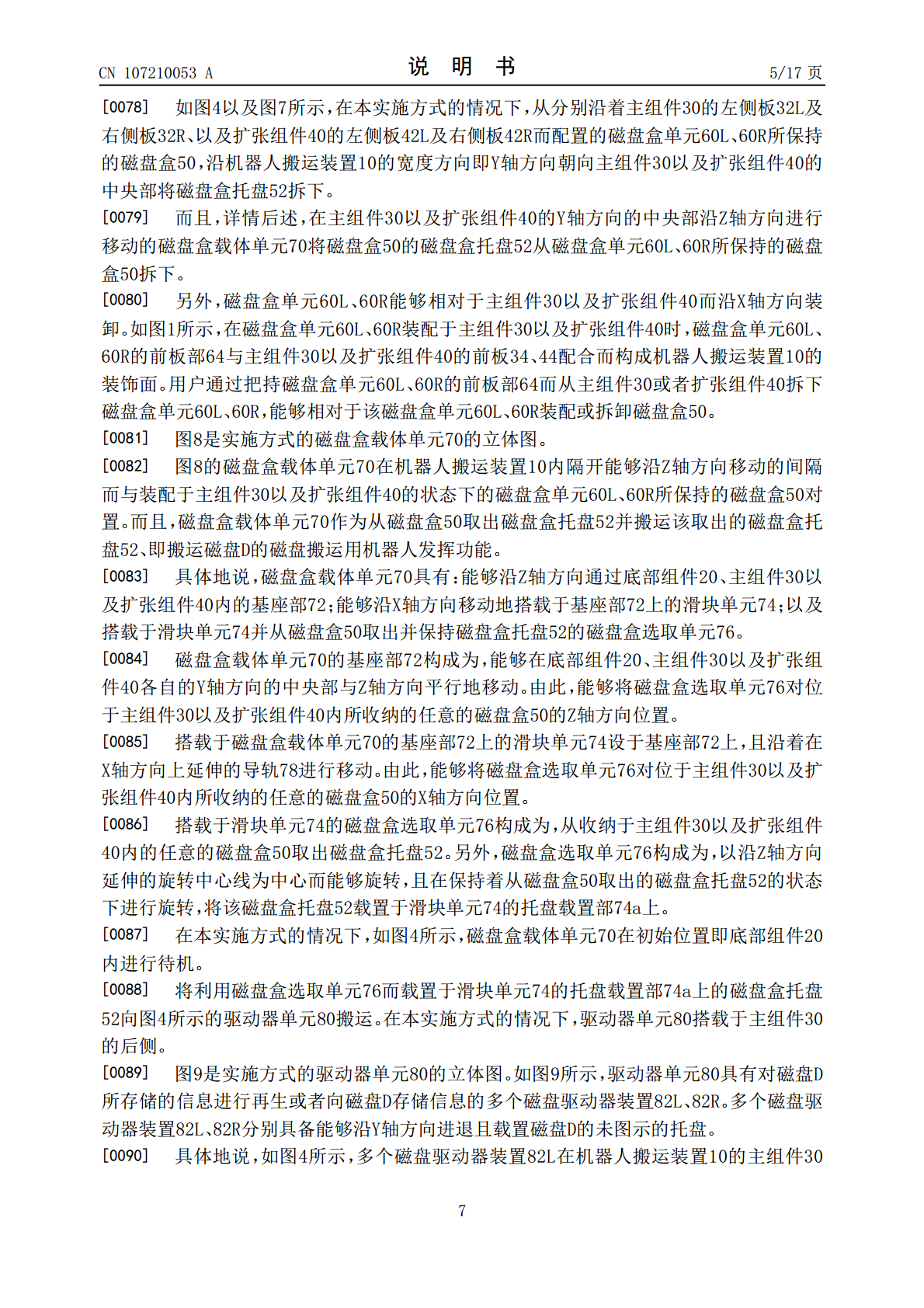
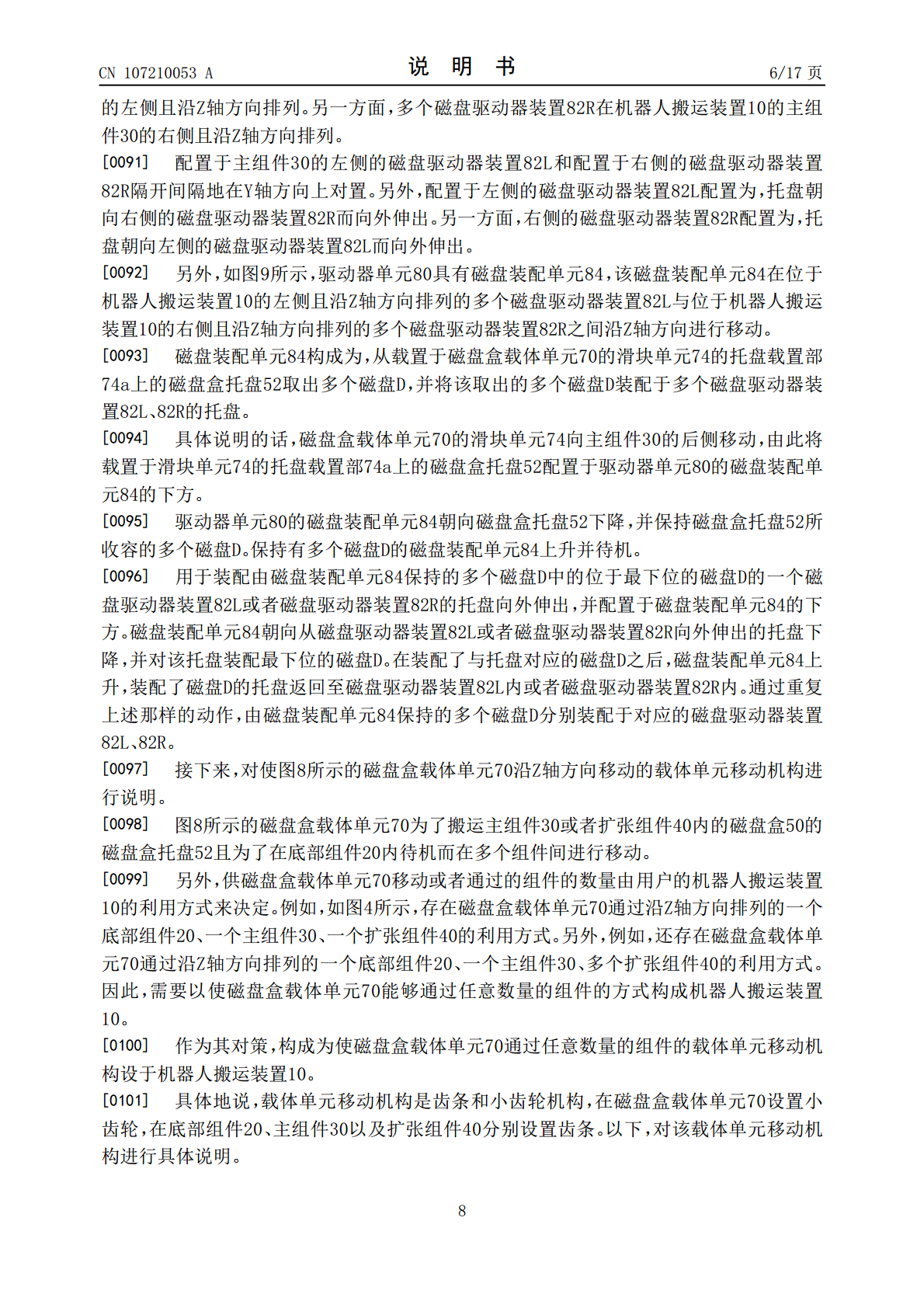
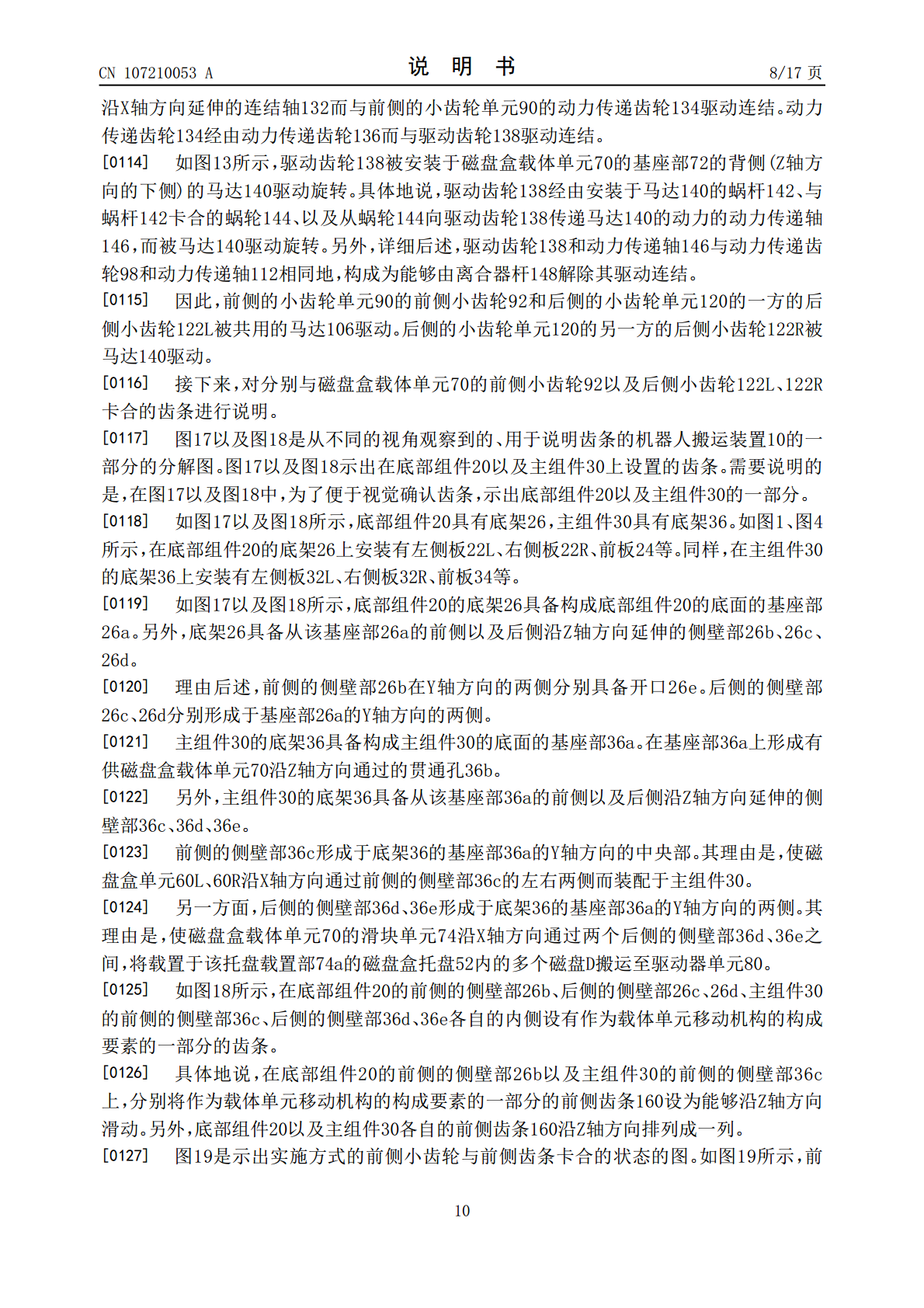
本公开的机器人搬运装置具有:沿第一方向排列的多个组件;能够在多个组件的各个组件内沿第一方向移动的机器人;设于机器人的小齿轮;能够沿第一方向滑动地支承于多个组件的各个组件,能够与小齿轮卡合,且沿第一方向排列的多个齿条;以及使沿第一方向排列的多个齿条中的、位于一方的末端的齿条朝向位于另一方的末端的齿条滑动而使多个齿条的各个齿条与相邻的其他齿条连接的齿条连接机构。

搬运装置、搬运机器人及仓储系统.pdf
本发明属于料箱仓储的技术领域,公开了一种搬运装置、搬运机器人及仓储系统。搬运装置包括:底板、安装板、伸缩机构、固定板、吸盘、驱动组件以及承托组件。安装板设置在底板上;伸缩机构设置在安装板上并可沿第一方向伸缩;固定板设置在伸缩机构远离安装板的一侧;吸盘设置在固定板;驱动组件设置在底板上并与伸缩机构连接。承托组件设置在底板上以用于承托吸盘吸附的料箱。以此通过驱动组件、伸缩机构以及吸盘的配合,吸附料箱的侧面即可完成对料箱的搬运,因此在料箱摆放时无需预留夹取料箱用的间隙,只需要使得相邻料箱之间存在一定间隔即可,以

四足搬运机器人装置.pdf
本实用新型公开了一种四足搬运机器人装置,包括上躯干、下躯干、躯干连接板、四根腿支链转轴、四个电推杆和四个腿支链;所述上躯干和下躯干通过躯干连接板固定在一起,四个腿支链分别通过四个腿支链转轴与上躯干和下躯干连接在一起;四个电推杆的一端连接均连接在躯干连接板上,四个电推杆的另一端分别连接四个腿支链并用于驱动四个腿支链绕对应的腿支链转轴转动;本实用新型采用对称结构设计,运动灵活,承载能力强,具有结构简单紧凑,设计合理,加工和装配工艺良好的优点;通过曲柄驱动可以实现足部在地面上长时间的做匀速直线运动,加强了行走时

搬运机器人运行控制方法、装置及机器人.pdf
本发明公开了一种搬运机器人运行控制方法、装置及机器人,涉及机器人技术领域,其中的方法包括:根据左主动轮运行距离、右主动轮运行距离以及预定运行轨迹确定左主动轮跟随误差、右主动轮跟随误差,生成左主动轮位置调整指令和右主动轮位置调整指令,将左主动轮位置调整指令和右主动轮位置调整指令分别发送给第一伺服驱动系统和第二伺服驱动系统,减少运行偏差。本发明的方法、装置及机器人,基于左、右主动轮的跟随误差同时控制两台独立电机的运行,将电机的独立控制变成耦合控制,减小了各个电机的动态特性对于搬运机器人运行的影响,提高了搬运机
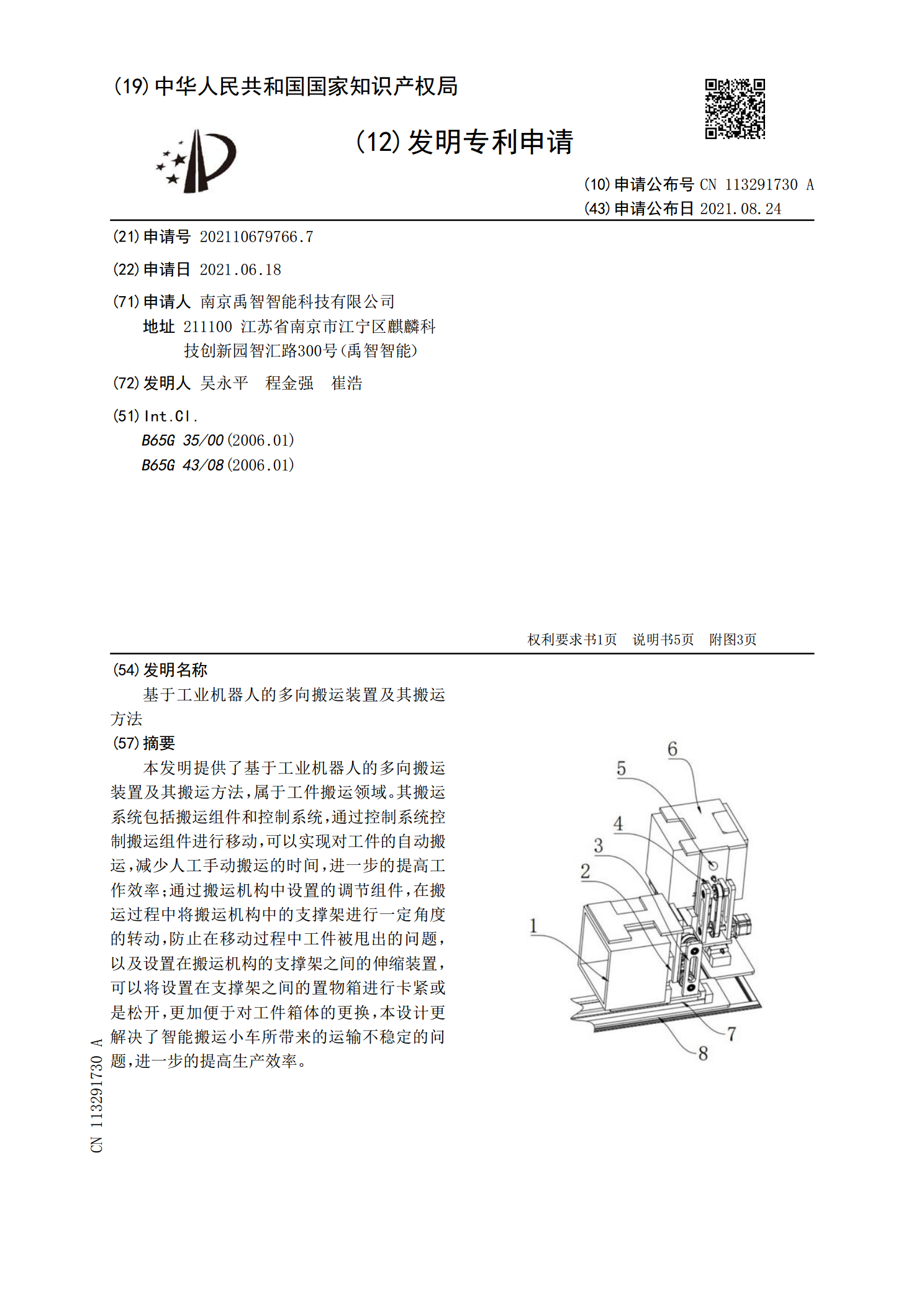
基于工业机器人的多向搬运装置及其搬运方法.pdf
本发明提供了基于工业机器人的多向搬运装置及其搬运方法,属于工件搬运领域。其搬运系统包括搬运组件和控制系统,通过控制系统控制搬运组件进行移动,可以实现对工件的自动搬运,减少人工手动搬运的时间,进一步的提高工作效率;通过搬运机构中设置的调节组件,在搬运过程中将搬运机构中的支撑架进行一定角度的转动,防止在移动过程中工件被甩出的问题,以及设置在搬运机构的支撑架之间的伸缩装置,可以将设置在支撑架之间的置物箱进行卡紧或是松开,更加便于对工件箱体的更换,本设计更解决了智能搬运小车所带来的运输不稳定的问题,进一步的提高生