
基于工业机器人的多向搬运装置及其搬运方法.pdf

小沛****文章

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于工业机器人的多向搬运装置及其搬运方法.pdf
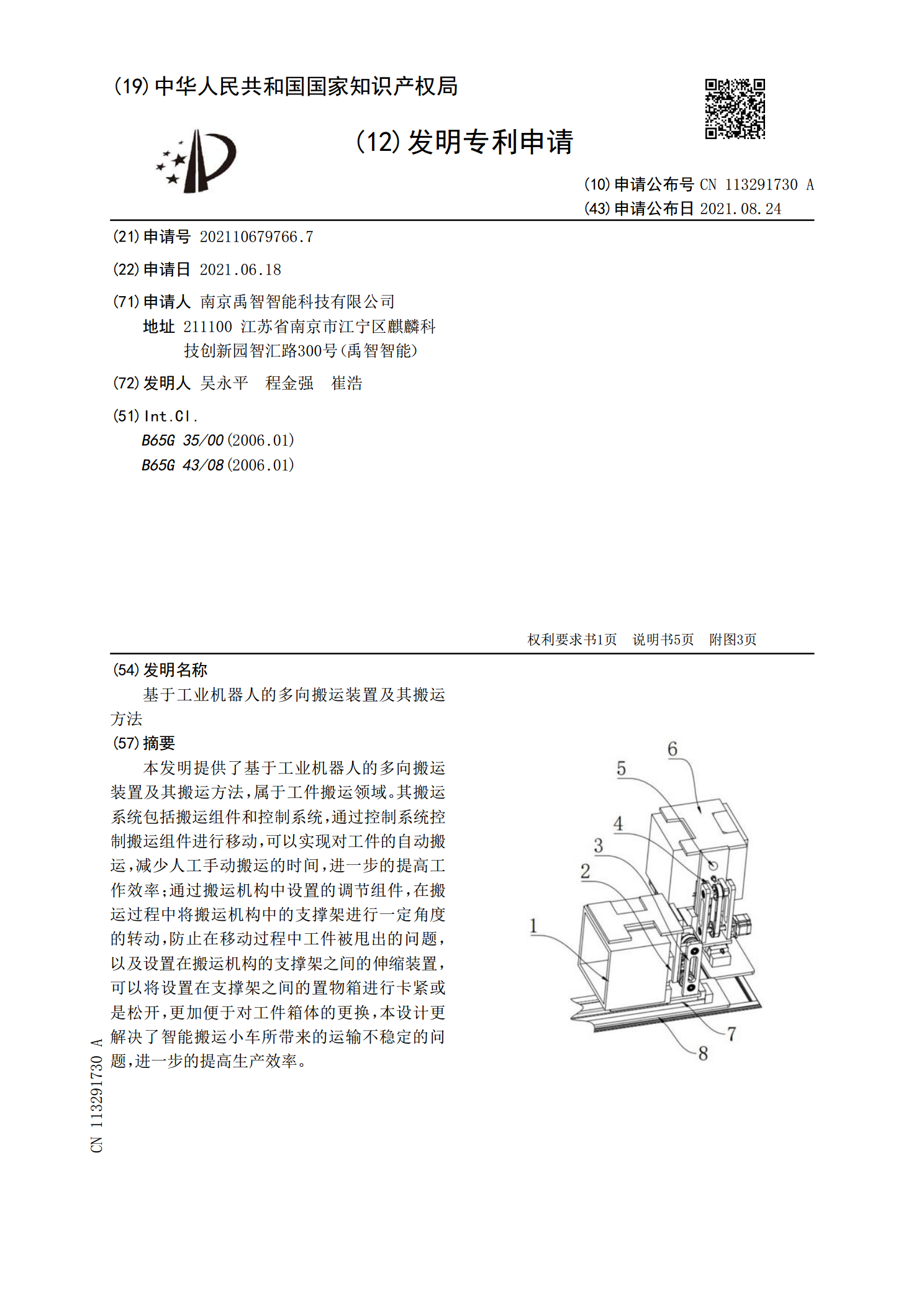
本发明提供了基于工业机器人的多向搬运装置及其搬运方法,属于工件搬运领域。其搬运系统包括搬运组件和控制系统,通过控制系统控制搬运组件进行移动,可以实现对工件的自动搬运,减少人工手动搬运的时间,进一步的提高工作效率;通过搬运机构中设置的调节组件,在搬运过程中将搬运机构中的支撑架进行一定角度的转动,防止在移动过程中工件被甩出的问题,以及设置在搬运机构的支撑架之间的伸缩装置,可以将设置在支撑架之间的置物箱进行卡紧或是松开,更加便于对工件箱体的更换,本设计更解决了智能搬运小车所带来的运输不稳定的问题,进一步的提高生

基于工业机器人的配料搬运装置设计.docx
基于工业机器人的配料搬运装置设计近年来,随着物流需求的不断增加和物流市场的不断扩大,工业机器人在物流领域中的应用越来越广泛。在物流作业中,配料搬运是难度较大的一项任务,需要高精度、高效率的物流设备。本文将讨论基于工业机器人的配料搬运装置设计,分析其技术原理和应用价值。一、设计思路机器人搬运装置是现代工业制造中一种高效、精确的搬运设备。机器人具有快速、准确、高效等优点,可以大大提高工作效率和质量。针对配料搬运中的复杂情况,设计思路如下:1.采用3D视觉观察技术,以便机器人感知配料的大小、形状和重量,以及周围
玻璃搬运机器人及其搬运方法.pdf
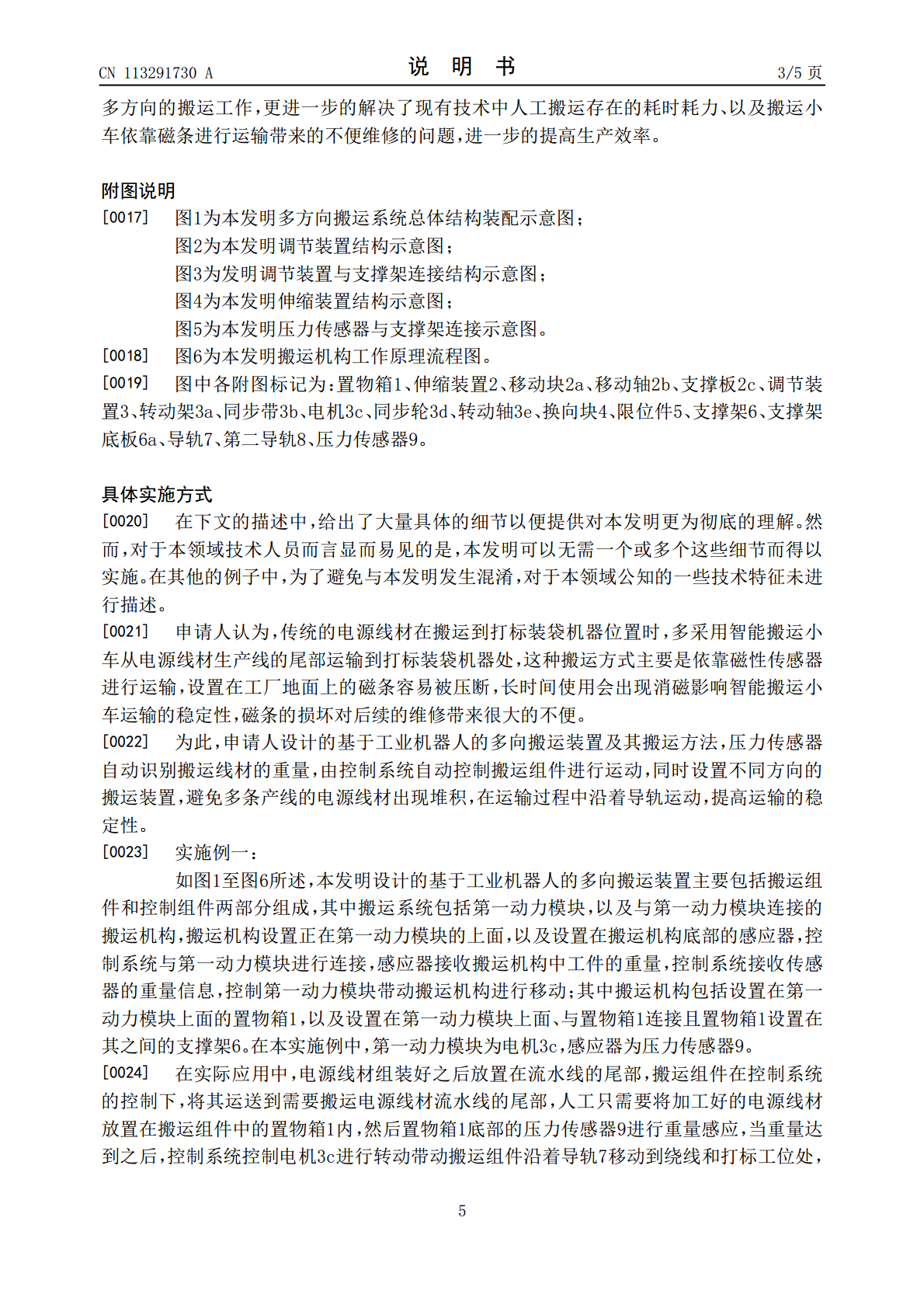
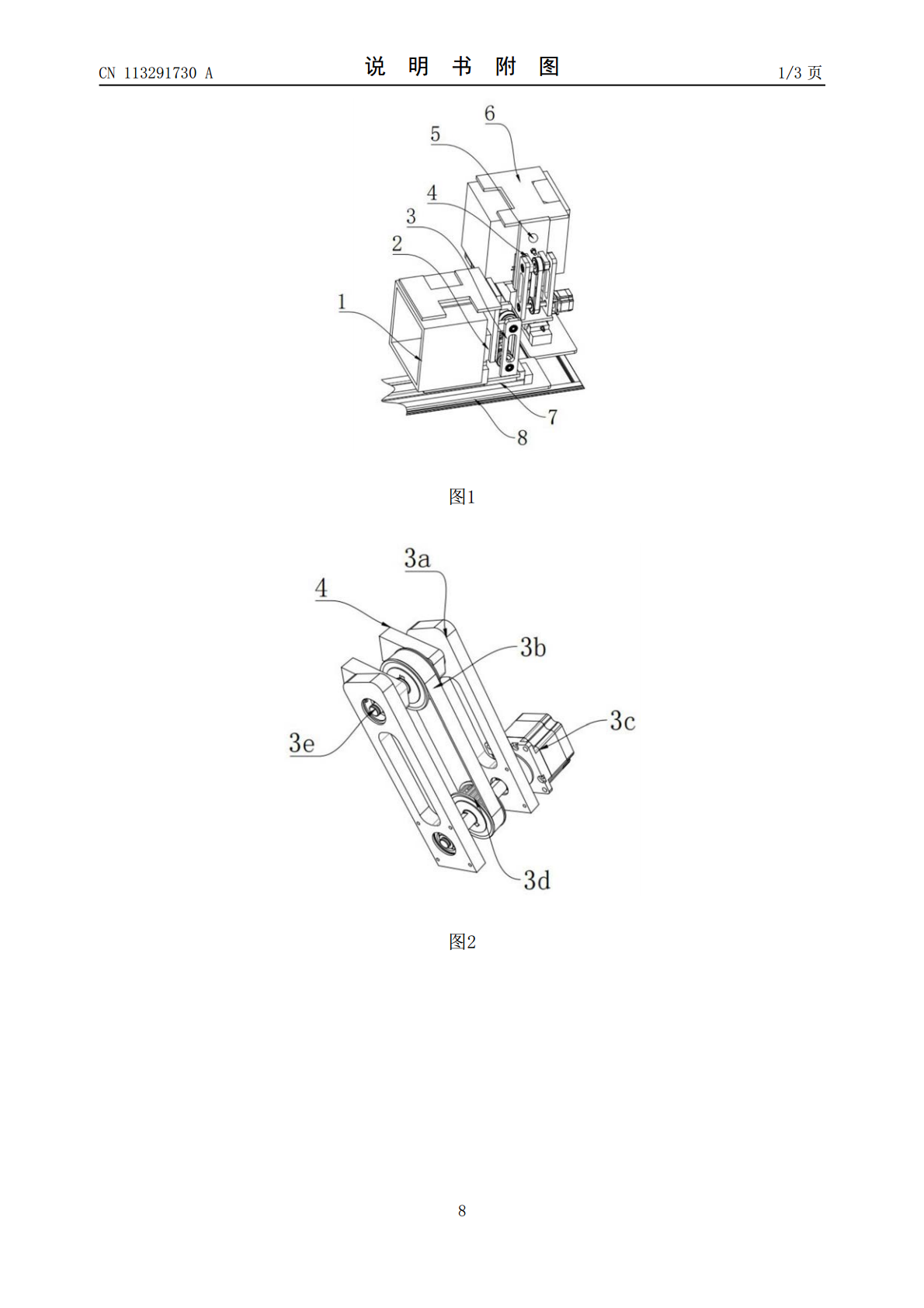
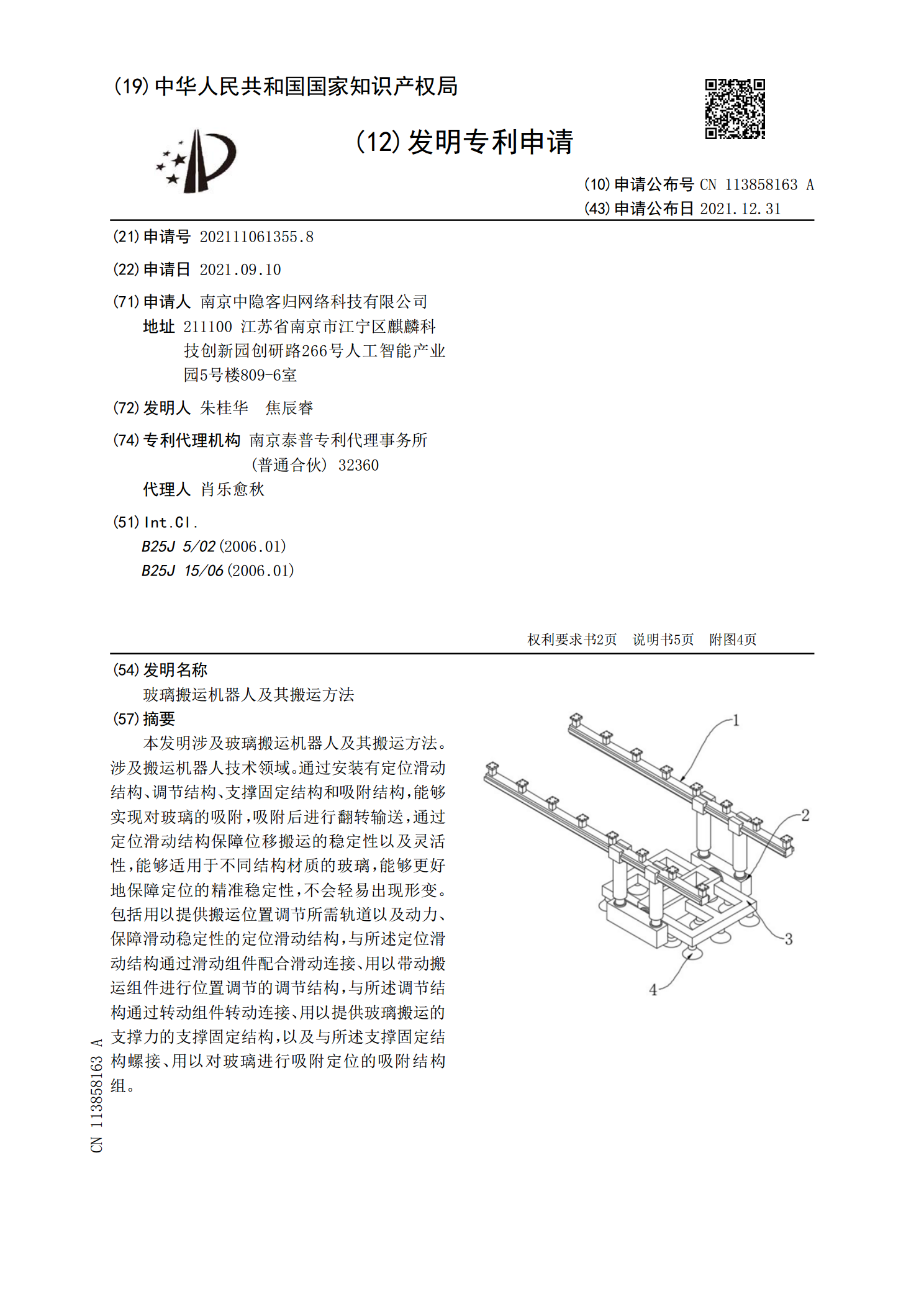
本发明涉及玻璃搬运机器人及其搬运方法。涉及搬运机器人技术领域。通过安装有定位滑动结构、调节结构、支撑固定结构和吸附结构,能够实现对玻璃的吸附,吸附后进行翻转输送,通过定位滑动结构保障位移搬运的稳定性以及灵活性,能够适用于不同结构材质的玻璃,能够更好地保障定位的精准稳定性,不会轻易出现形变。包括用以提供搬运位置调节所需轨道以及动力、保障滑动稳定性的定位滑动结构,与所述定位滑动结构通过滑动组件配合滑动连接、用以带动搬运组件进行位置调节的调节结构,与所述调节结构通过转动组件转动连接、用以提供玻璃搬运的支撑力的支
一种工业生产用搬运机器人及其搬运方法.pdf
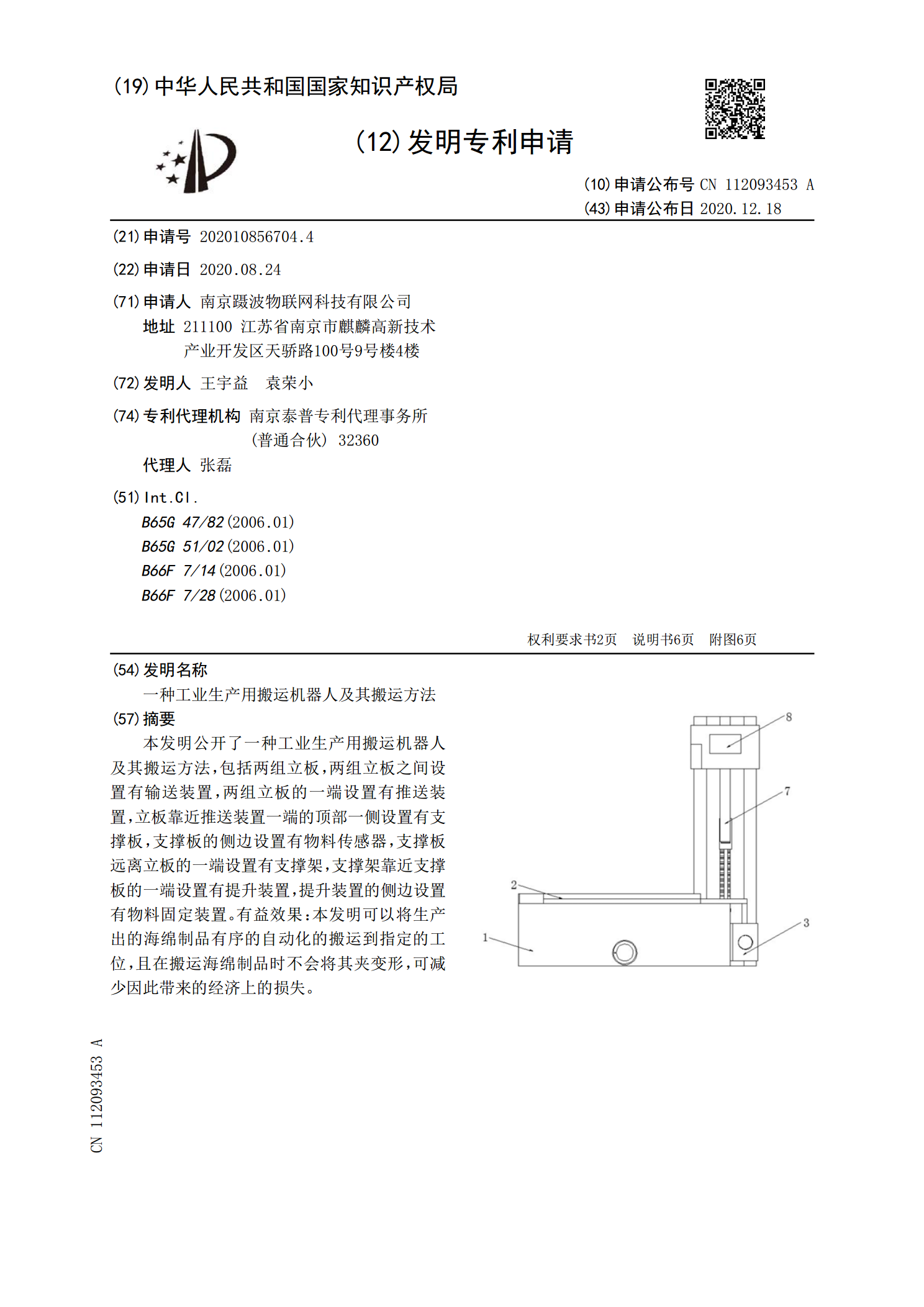
本发明公开了一种工业生产用搬运机器人及其搬运方法,包括两组立板,两组立板之间设置有输送装置,两组立板的一端设置有推送装置,立板靠近推送装置一端的顶部一侧设置有支撑板,支撑板的侧边设置有物料传感器,支撑板远离立板的一端设置有支撑架,支撑架靠近支撑板的一端设置有提升装置,提升装置的侧边设置有物料固定装置。有益效果:本发明可以将生产出的海绵制品有序的自动化的搬运到指定的工位,且在搬运海绵制品时不会将其夹变形,可减少因此带来的经济上的损失。
一种搬运装置及其搬运方法.pdf
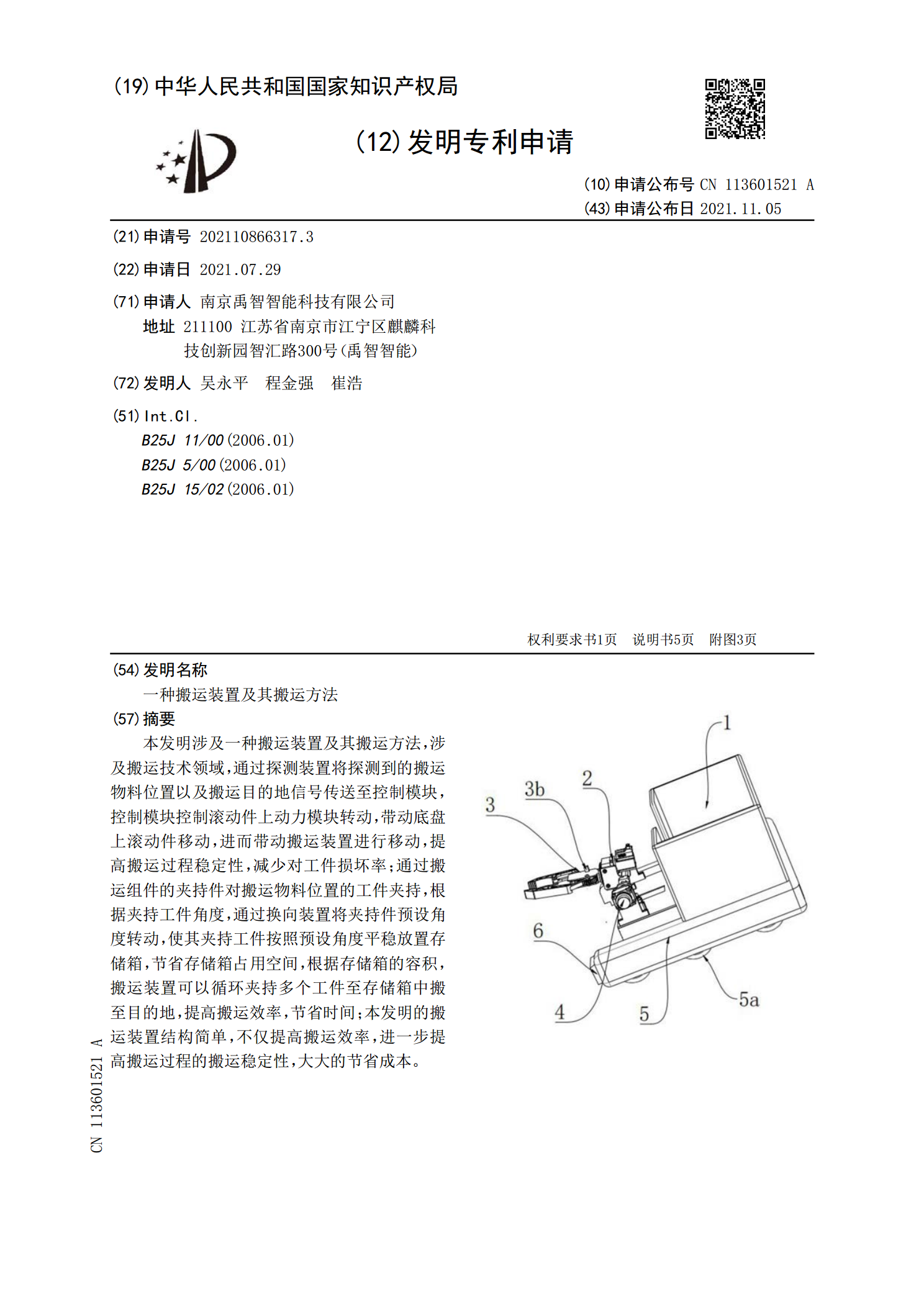
本发明涉及一种搬运装置及其搬运方法,涉及搬运技术领域,通过探测装置将探测到的搬运物料位置以及搬运目的地信号传送至控制模块,控制模块控制滚动件上动力模块转动,带动底盘上滚动件移动,进而带动搬运装置进行移动,提高搬运过程稳定性,减少对工件损坏率;通过搬运组件的夹持件对搬运物料位置的工件夹持,根据夹持工件角度,通过换向装置将夹持件预设角度转动,使其夹持工件按照预设角度平稳放置存储箱,节省存储箱占用空间,根据存储箱的容积,搬运装置可以循环夹持多个工件至存储箱中搬至目的地,提高搬运效率,节省时间;本发明的搬运装置结