
一种用于电动汽车的制动控制装置及控制方法.pdf

英哲****公主


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于电动汽车的制动控制装置及控制方法.pdf
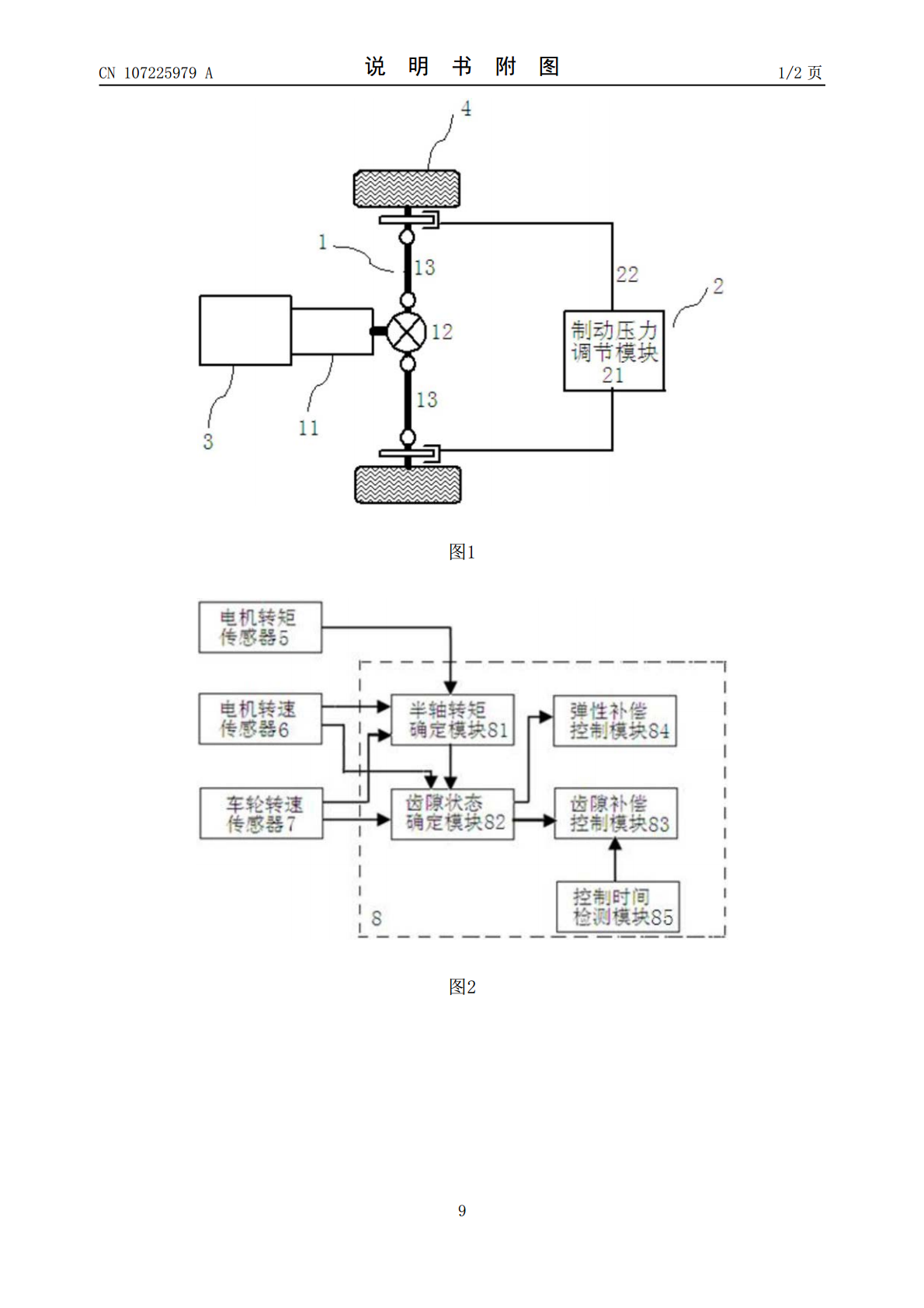
本发明涉及一种用于电动汽车的制动控制装置及控制方法,通过调节电机的回馈制动力和液压控制系统的液压制动力对传动系特性进行补偿,其特征在于,包括电机转矩传感器、电机转速传感器、车轮转速传感器和车载制动控制系统,其中,所述车载制动控制系统包括半轴转矩确定模块、齿隙状态确定模块、齿隙补偿控制模块、弹性补偿控制模块和控制时间检测模块;通过齿隙状态确定模块确定齿隙状态,并根据传动系中齿轮啮合处的齿隙状态通过齿隙补偿控制模块或弹性补偿控制模块对传动系进行齿隙补偿控制或弹性补偿控制,能够减小由于传动系的齿隙和弹性而引起相
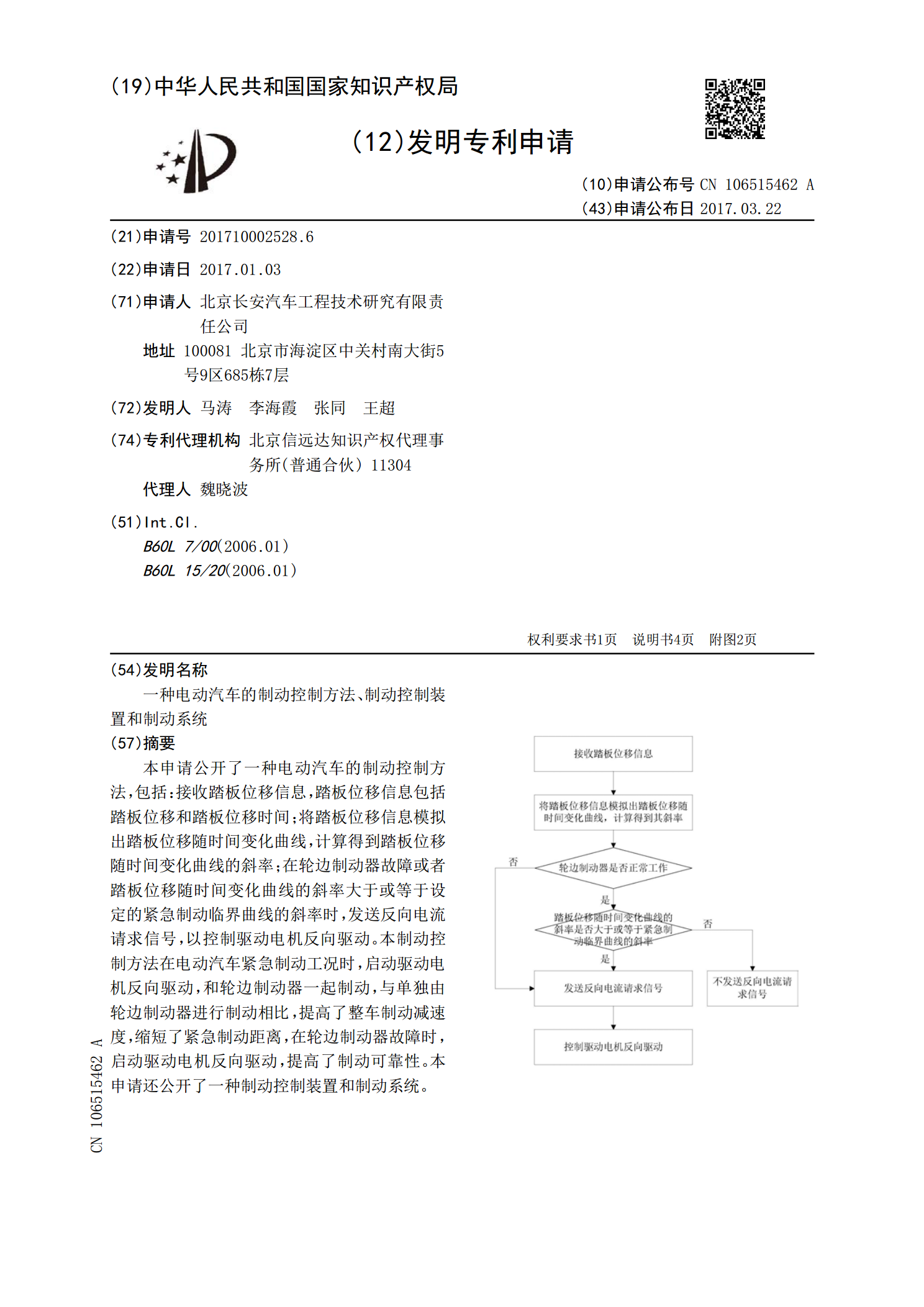
一种电动汽车的制动控制方法、制动控制装置和制动系统.pdf
本申请公开了一种电动汽车的制动控制方法,包括:接收踏板位移信息,踏板位移信息包括踏板位移和踏板位移时间;将踏板位移信息模拟出踏板位移随时间变化曲线,计算得到踏板位移随时间变化曲线的斜率;在轮边制动器故障或者踏板位移随时间变化曲线的斜率大于或等于设定的紧急制动临界曲线的斜率时,发送反向电流请求信号,以控制驱动电机反向驱动。本制动控制方法在电动汽车紧急制动工况时,启动驱动电机反向驱动,和轮边制动器一起制动,与单独由轮边制动器进行制动相比,提高了整车制动减速度,缩短了紧急制动距离,在轮边制动器故障时,启动驱动电

用于车辆的制动控制装置及制动控制方法.pdf
一种用于车辆的制动控制装置,该车辆包括驱动再生施加装置(10)和液压制动系统(20),该驱动再生施加装置构造成向车辆施加驱动力或再生制动力,该液压系统构造成通过调节设置在车轮的轮缸中的液压压力来向车辆施加液压制动力,制动控制装置包括:电子控制单元(100),该电子控制单元构造成:当基于制动操作量——即制动操作构件的操作量——的减少而减小液压制动力时,执行修正处理,该修正处理是减少由驱动再生施加装置施加至车辆的再生制动力的处理。

用于车辆的制动控制装置和用于车辆的制动控制方法.pdf
一种用于车辆的制动控制装置,包括第一减速度计算单元、第二减速度计算单元、辅助控制单元和终止判定单元。第一减速度计算单元利用来自轮速传感器的检测信号计算第一估算车体减速度。第二减速度计算单元利用车体加速度传感器的检测信号计算第二估算车体减速度。如果第一估算车体减速度超过第一减速度判定值并且第二估算车体减速度超过第二减速度判定值,则辅助控制单元启动用于支持增大制动力的辅助控制。终止判定单元基于第一估算车体减速度和/或第二估算车体减速度判定是否已经满足辅助控制的终止条件。如果终止判定单元判定已经满足终止条件,则

用于制动控制的方法和装置.pdf
本发明涉及用于制动控制的方法和装置,所述方法包括:当对车辆执行分路制动时,判断是否比正常轮胎小的小型备胎安装在所述车辆的后轴上并且位于所述车辆正在其上行驶的道路的较高附着系数侧部分上;如果所述判断的结果为肯定,则基于针对所述小型备胎而设置的分路制动的参数的值,生成应用到所述车辆的前轴的左侧车轮和右侧车轮的制动压力;将所生成的制动压力输出给用于所述左侧车轮和所述右侧车轮的制动设备。利用所述方法和装置,能够实现其后轴安装了小型备胎的车辆的平稳制动。