
一种履带式攀爬机器人.pdf

篷璐****爱吗

1/7

2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种履带式攀爬机器人.pdf
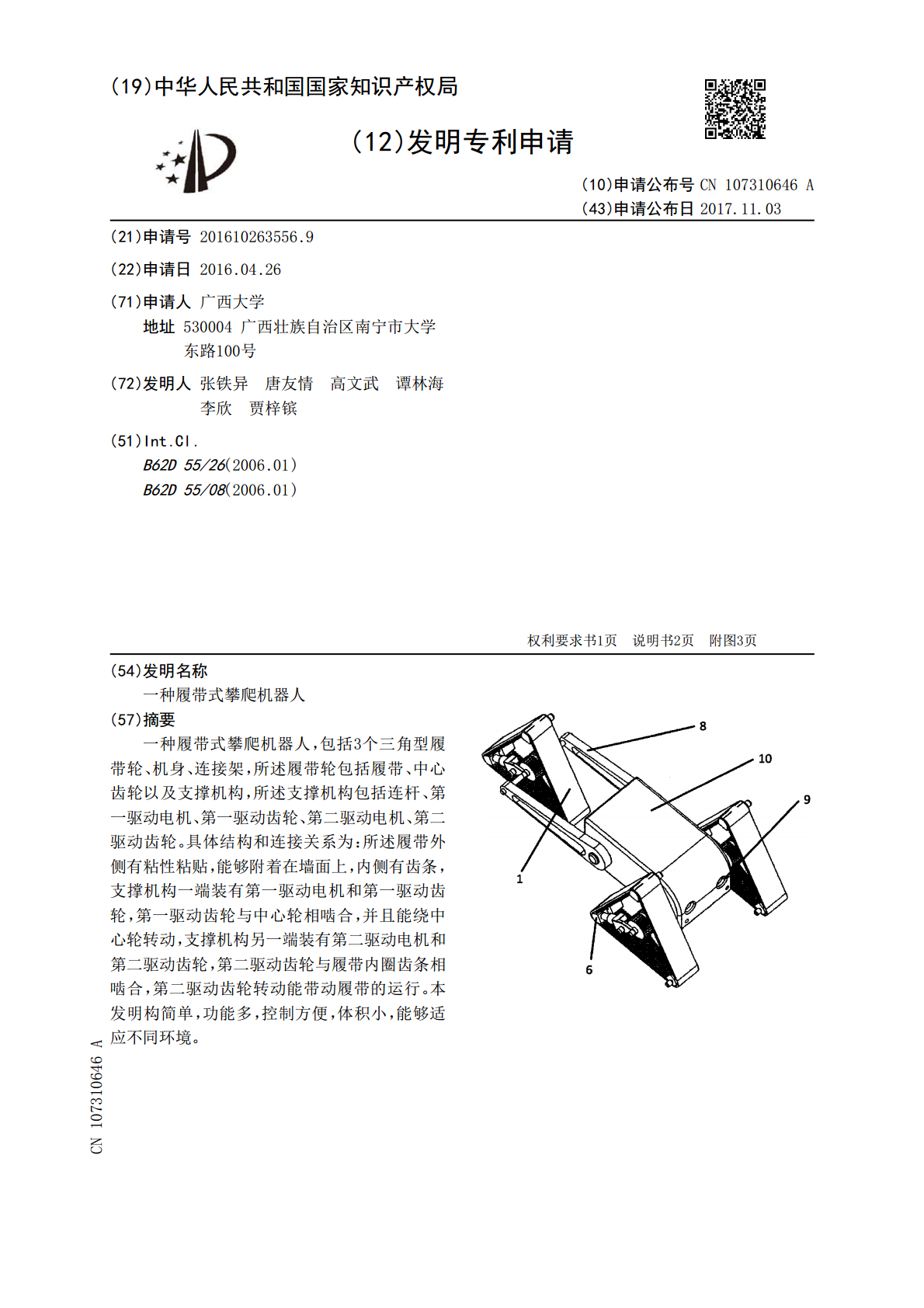
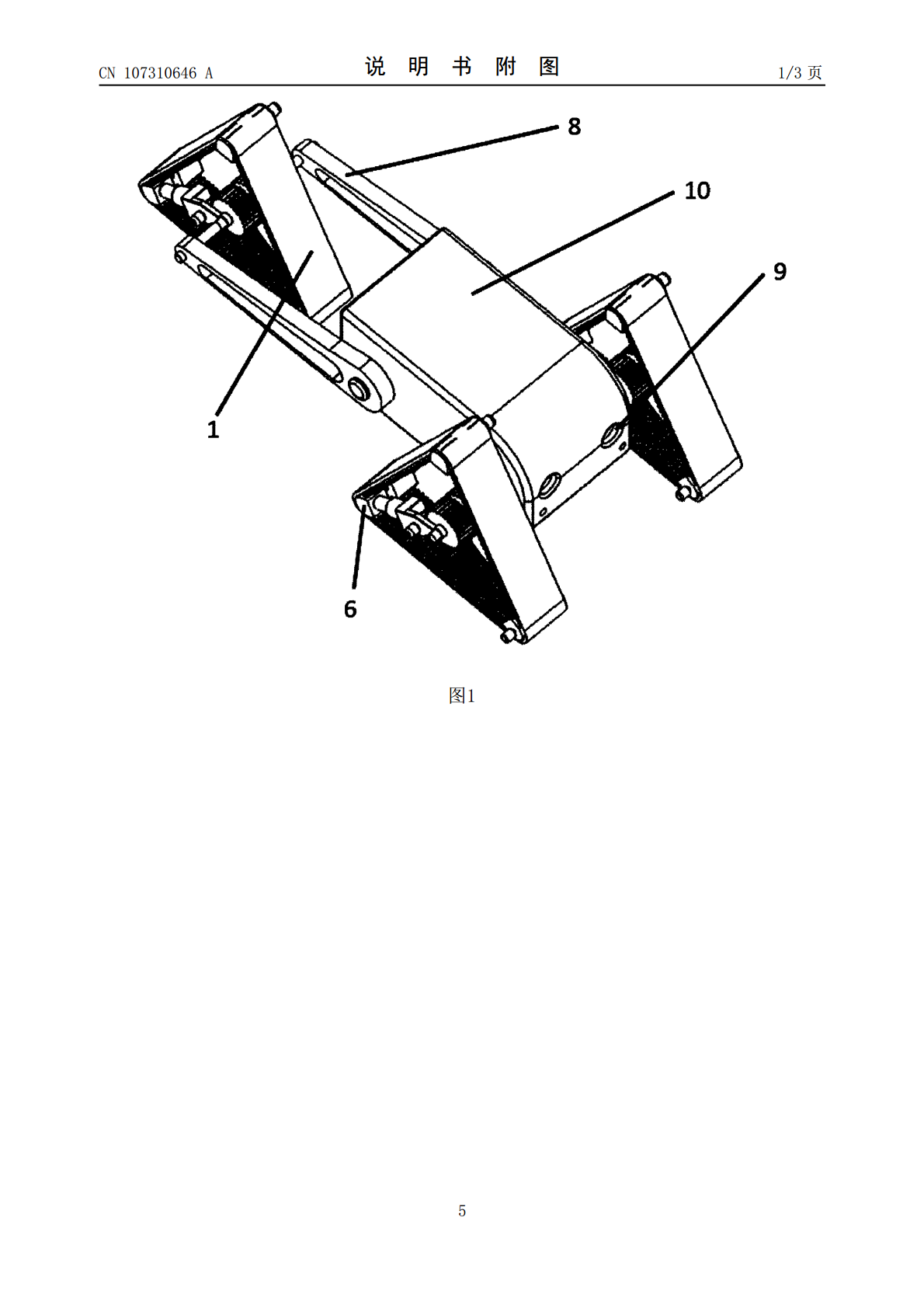
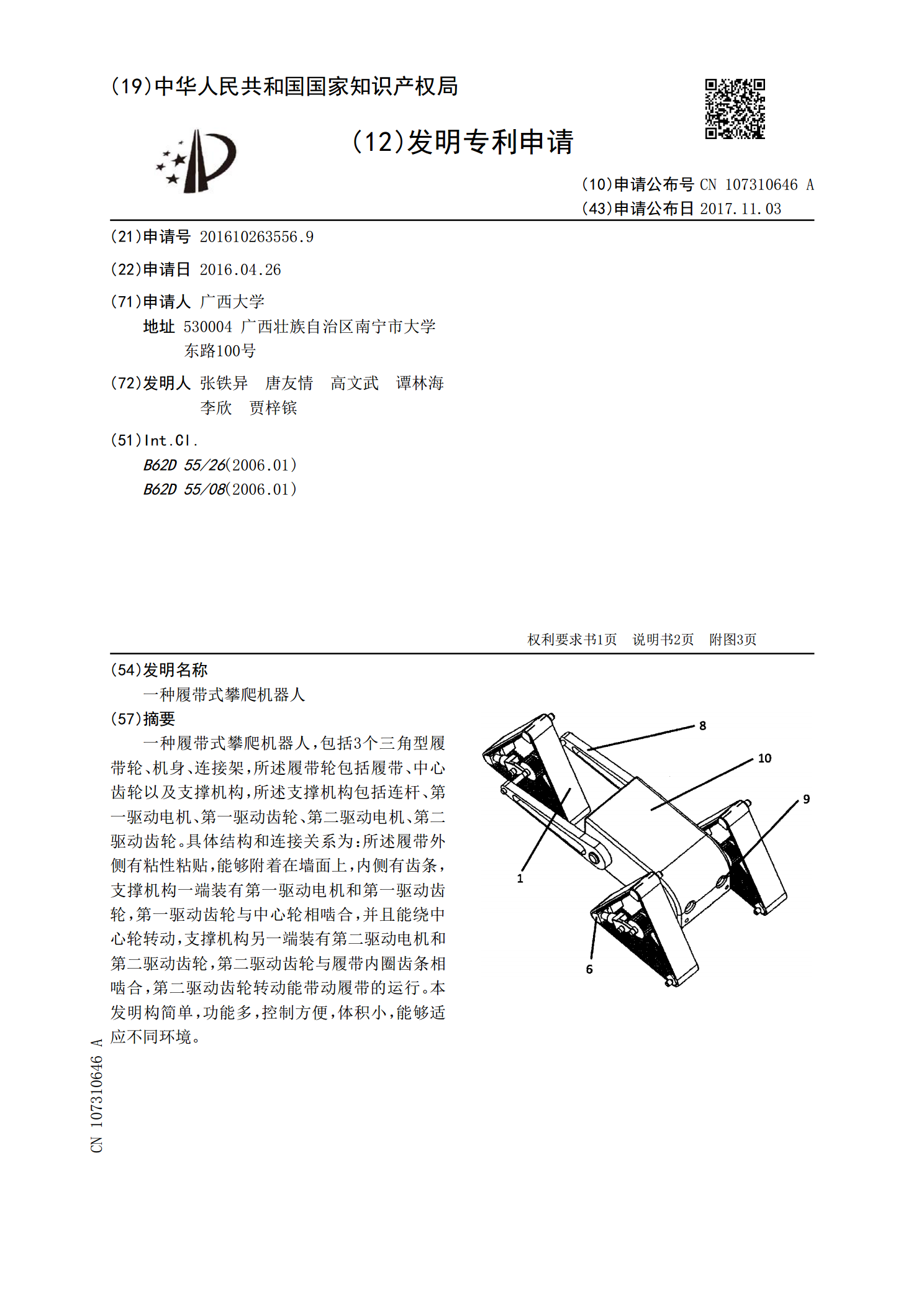
一种履带式攀爬机器人,包括3个三角型履带轮、机身、连接架,所述履带轮包括履带、中心齿轮以及支撑机构,所述支撑机构包括连杆、第一驱动电机、第一驱动齿轮、第二驱动电机、第二驱动齿轮。具体结构和连接关系为:所述履带外侧有粘性粘贴,能够附着在墙面上,内侧有齿条,支撑机构一端装有第一驱动电机和第一驱动齿轮,第一驱动齿轮与中心轮相啮合,并且能绕中心轮转动,支撑机构另一端装有第二驱动电机和第二驱动齿轮,第二驱动齿轮与履带内圈齿条相啮合,第二驱动齿轮转动能带动履带的运行。本发明构简单,功能多,控制方便,体积小,能够适应不
一种磁力履带式通信塔设备维修攀爬机器人.pdf
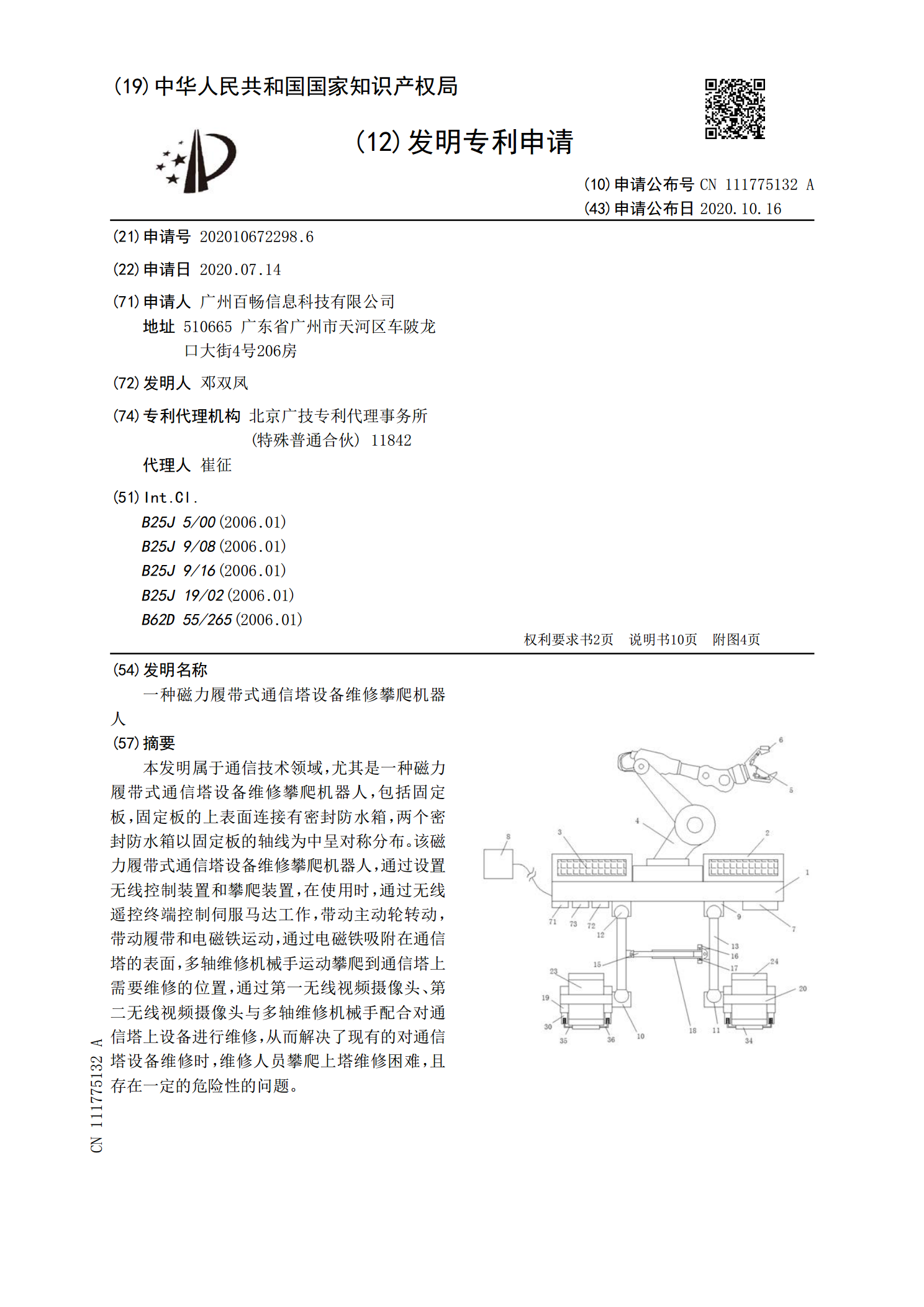
本发明属于通信技术领域,尤其是一种磁力履带式通信塔设备维修攀爬机器人,包括固定板,固定板的上表面连接有密封防水箱,两个密封防水箱以固定板的轴线为中呈对称分布。该磁力履带式通信塔设备维修攀爬机器人,通过设置无线控制装置和攀爬装置,在使用时,通过无线遥控终端控制伺服马达工作,带动主动轮转动,带动履带和电磁铁运动,通过电磁铁吸附在通信塔的表面,多轴维修机械手运动攀爬到通信塔上需要维修的位置,通过第一无线视频摄像头、第二无线视频摄像头与多轴维修机械手配合对通信塔上设备进行维修,从而解决了现有的对通信塔设备维修时,

磁吸附履带式攀爬钢缆机器人的分析与研究.docx
磁吸附履带式攀爬钢缆机器人的分析与研究磁吸附陀螺式攀爬钢缆机器人的分析与研究摘要:随着建筑物和桥梁的高度不断增加,人们对于可靠而高效的维护和检查方法的需求也越来越迫切。而传统的攀爬机器人因为其自身在复杂环境中的稳定性和可靠性问题,已经无法满足这种需求。本文提出一种基于磁吸附陀螺式设计的攀爬机器人,主要分析了其原理和结构,并进行了相关验证和试验。结果显示,该机器人在攀爬过程中表现出良好的稳定性和可靠性,能够成功完成各类维护和检查任务。1.引言近年来,随着城市化进程的快速推进和建筑物高度的不断增加,对于高处的
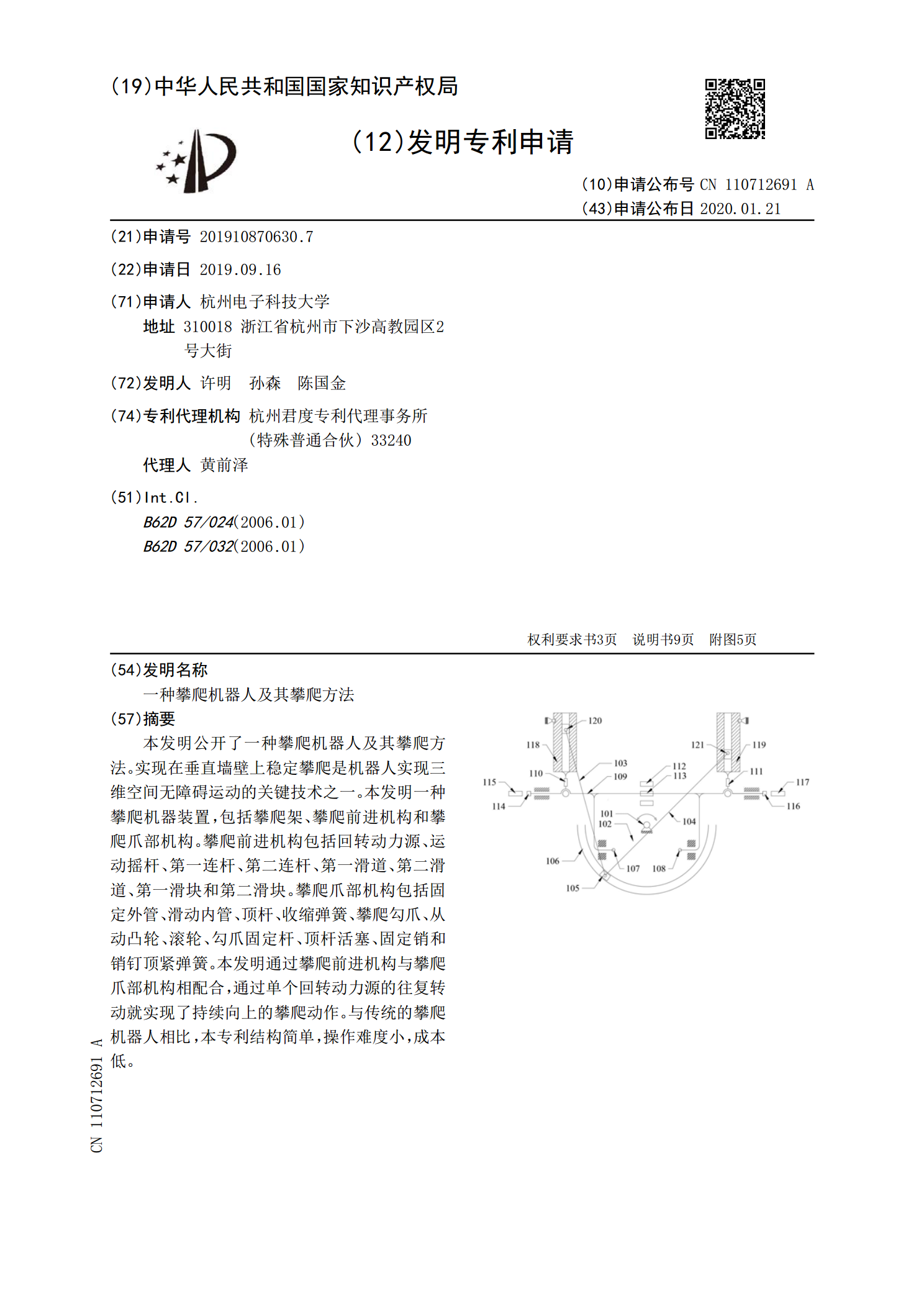
一种攀爬机器人及其攀爬方法.pdf
本发明公开了一种攀爬机器人及其攀爬方法。实现在垂直墙壁上稳定攀爬是机器人实现三维空间无障碍运动的关键技术之一。本发明一种攀爬机器装置,包括攀爬架、攀爬前进机构和攀爬爪部机构。攀爬前进机构包括回转动力源、运动摇杆、第一连杆、第二连杆、第一滑道、第二滑道、第一滑块和第二滑块。攀爬爪部机构包括固定外管、滑动内管、顶杆、收缩弹簧、攀爬勾爪、从动凸轮、滚轮、勾爪固定杆、顶杆活塞、固定销和销钉顶紧弹簧。本发明通过攀爬前进机构与攀爬爪部机构相配合,通过单个回转动力源的往复转动就实现了持续向上的攀爬动作。与传统的攀爬机器
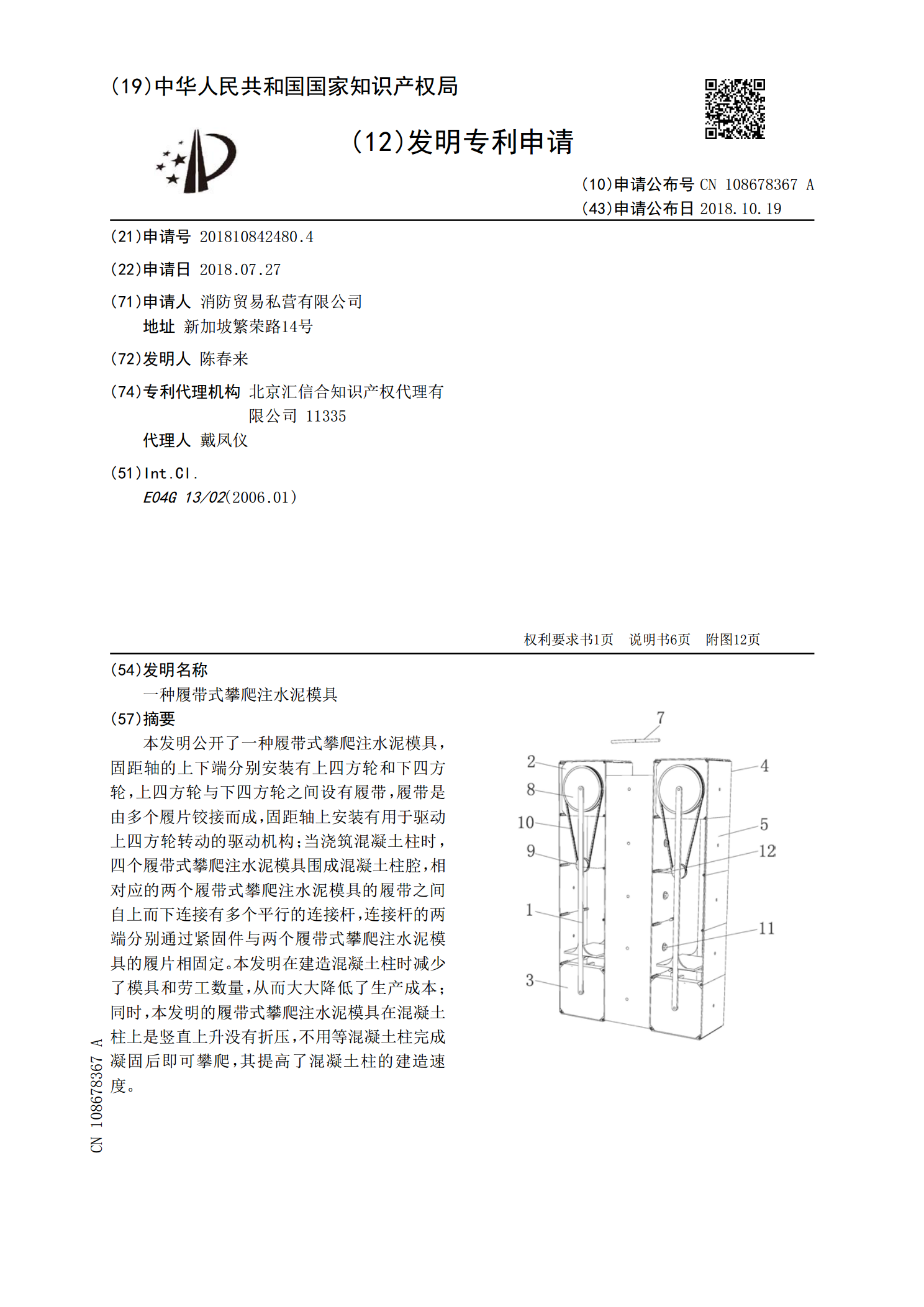
一种履带式攀爬注水泥模具.pdf
本发明公开了一种履带式攀爬注水泥模具,固距轴的上下端分别安装有上四方轮和下四方轮,上四方轮与下四方轮之间设有履带,履带是由多个履片铰接而成,固距轴上安装有用于驱动上四方轮转动的驱动机构;当浇筑混凝土柱时,四个履带式攀爬注水泥模具围成混凝土柱腔,相对应的两个履带式攀爬注水泥模具的履带之间自上而下连接有多个平行的连接杆,连接杆的两端分别通过紧固件与两个履带式攀爬注水泥模具的履片相固定。本发明在建造混凝土柱时减少了模具和劳工数量,从而大大降低了生产成本;同时,本发明的履带式攀爬注水泥模具在混凝土柱上是竖直上升没