
一种攀爬机器人及其攀爬方法.pdf

新槐****公主


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种攀爬机器人及其攀爬方法.pdf
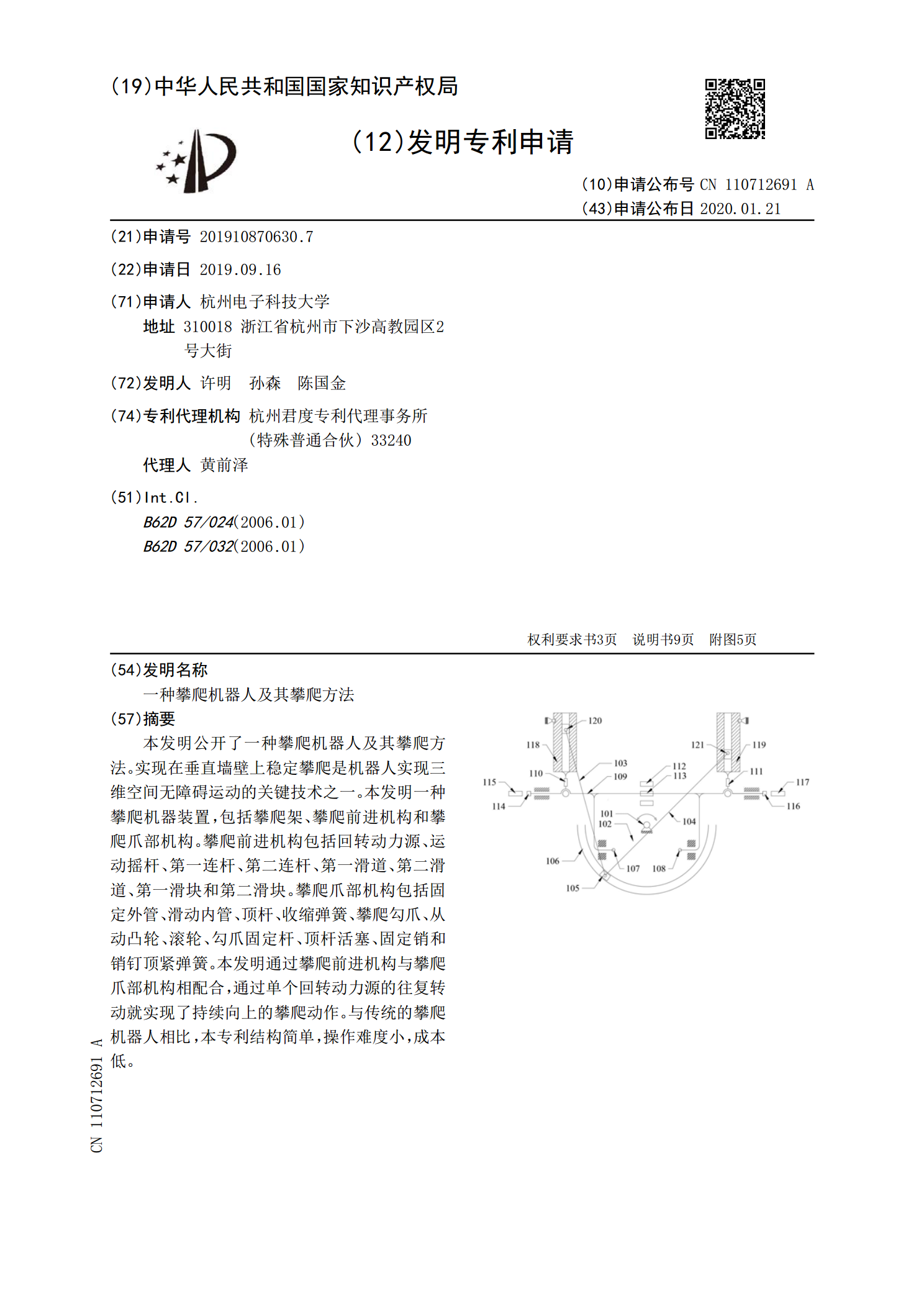
本发明公开了一种攀爬机器人及其攀爬方法。实现在垂直墙壁上稳定攀爬是机器人实现三维空间无障碍运动的关键技术之一。本发明一种攀爬机器装置,包括攀爬架、攀爬前进机构和攀爬爪部机构。攀爬前进机构包括回转动力源、运动摇杆、第一连杆、第二连杆、第一滑道、第二滑道、第一滑块和第二滑块。攀爬爪部机构包括固定外管、滑动内管、顶杆、收缩弹簧、攀爬勾爪、从动凸轮、滚轮、勾爪固定杆、顶杆活塞、固定销和销钉顶紧弹簧。本发明通过攀爬前进机构与攀爬爪部机构相配合,通过单个回转动力源的往复转动就实现了持续向上的攀爬动作。与传统的攀爬机器
一种绳索快速攀爬机器人及其攀爬方法.pdf
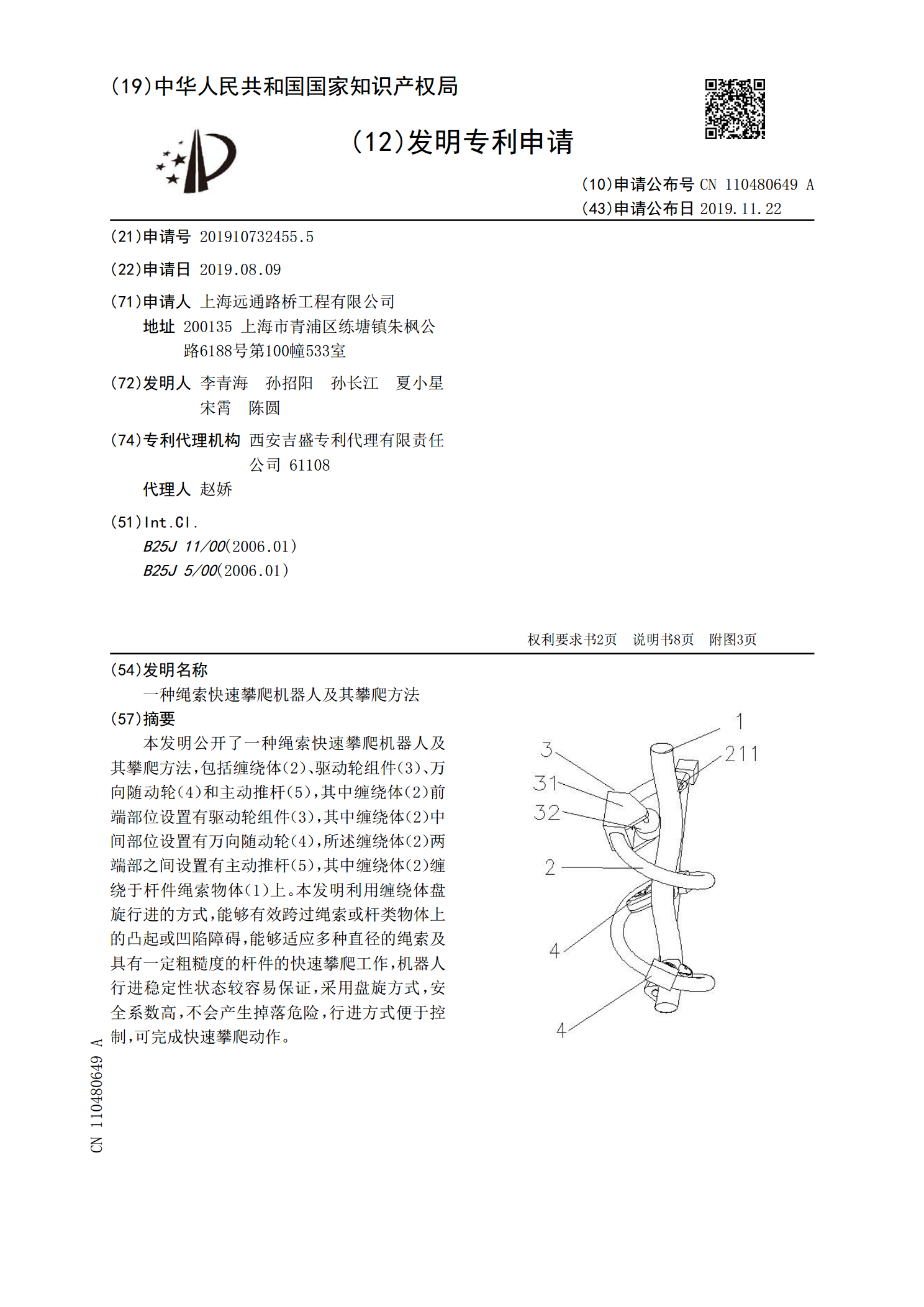
本发明公开了一种绳索快速攀爬机器人及其攀爬方法,包括缠绕体(2)、驱动轮组件(3)、万向随动轮(4)和主动推杆(5),其中缠绕体(2)前端部位设置有驱动轮组件(3),其中缠绕体(2)中间部位设置有万向随动轮(4),所述缠绕体(2)两端部之间设置有主动推杆(5),其中缠绕体(2)缠绕于杆件绳索物体(1)上。本发明利用缠绕体盘旋行进的方式,能够有效跨过绳索或杆类物体上的凸起或凹陷障碍,能够适应多种直径的绳索及具有一定粗糙度的杆件的快速攀爬工作,机器人行进稳定性状态较容易保证,采用盘旋方式,安全系数高,不会产生

一种攀爬台阶的底盘及其攀爬方法.pdf
本发明涉及一种攀爬台阶的底盘,包括底盘架、安装在底盘架上的前轮架和后轮架、转动式安装在前轮架上的第一前轮和第二前轮、转动式安装在后轮架上的后轮;前轮架呈弯折状,前轮架的弯折处和前轮架的两端分别位于某个三角形的三个顶点上,第一前轮转动式安装在前轮架的一端,第二前轮转动式安装在前轮架的另一端,第一前轮、第二前轮和后轮上均设有驱动件。本发明还涉及一种攀爬台阶的底盘的攀爬方法。与现有技术相比,本发明不仅结构简单可靠、质量轻、体积小、制造成本低,而且可以跨越台阶以及其他障碍物,属于攀爬底盘的技术领域。
基于攀爬机器人的攀爬方法.pdf
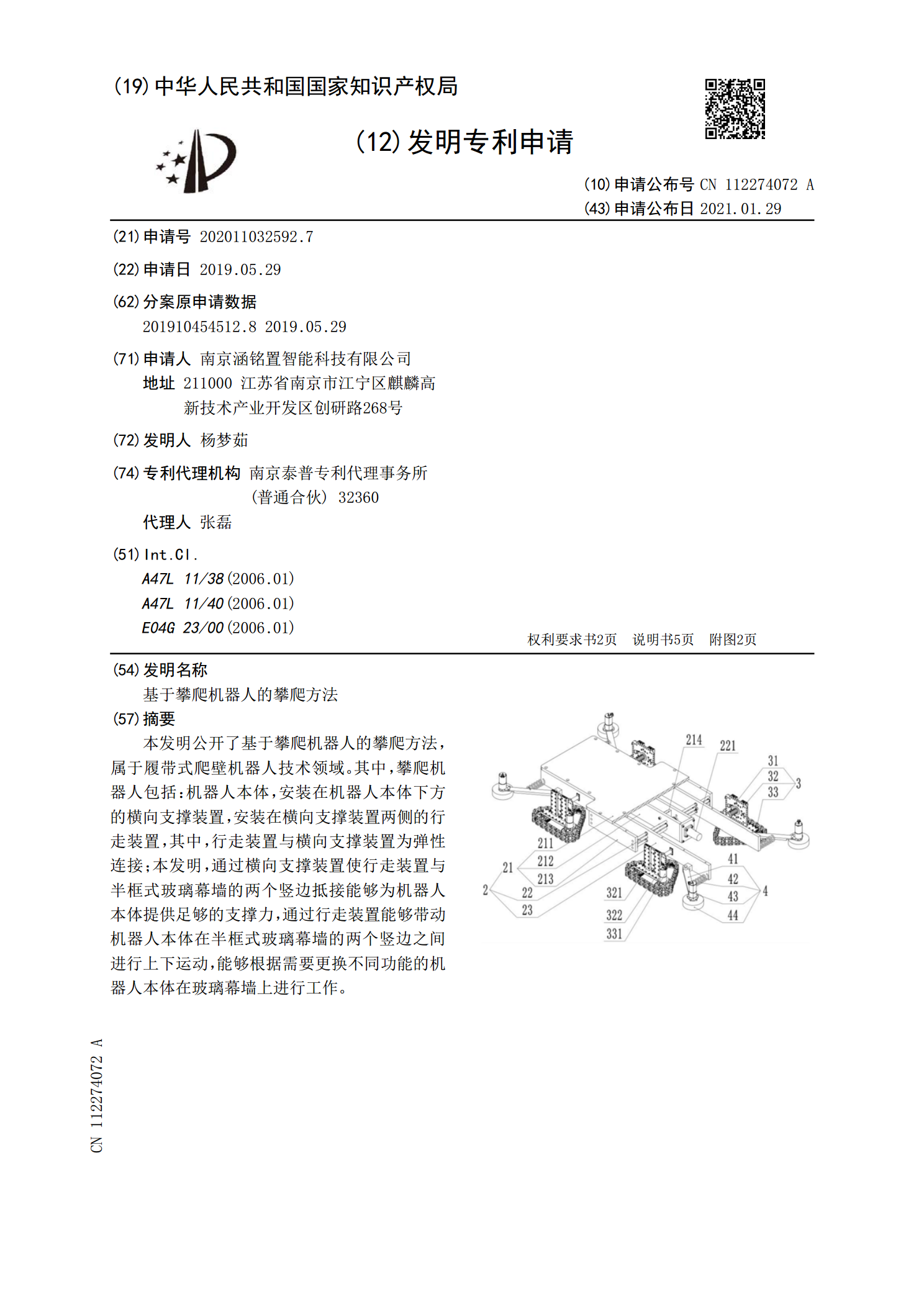
本发明公开了基于攀爬机器人的攀爬方法,属于履带式爬壁机器人技术领域。其中,攀爬机器人包括:机器人本体,安装在机器人本体下方的横向支撑装置,安装在横向支撑装置两侧的行走装置,其中,行走装置与横向支撑装置为弹性连接;本发明,通过横向支撑装置使行走装置与半框式玻璃幕墙的两个竖边抵接能够为机器人本体提供足够的支撑力,通过行走装置能够带动机器人本体在半框式玻璃幕墙的两个竖边之间进行上下运动,能够根据需要更换不同功能的机器人本体在玻璃幕墙上进行工作。

一种攀爬装置、爬楼机器人及其爬楼方法.pdf
一种攀爬装置及其爬楼机器人,包括爬爪、下移动板、直线轴承、连接固定板、导杆、丝杆、上移动板、电机、减速器、同步带、同步带轮111A、同步带轮111B、涨紧轮、缓冲器、接近开关;所述下移动板与上移动板通过导杆相连,导杆一端与下移动板固接,另一端与上移动板固定形成稳定框架结构,所述爬爪与下移动板固接;所述连接固定板通过直线轴承套在导杆上形成移动副;所述丝杆上端与上移动板连接形成转动副;所述丝杆下端与下移动板连接形成转动副,丝杆中部与连接固定板螺纹连接形成转动副。