
一种可变直径轮柔顺变径机构的力‑变形行为分析方法.pdf

书生****萌哒

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可变直径轮柔顺变径机构的力‑变形行为分析方法.pdf
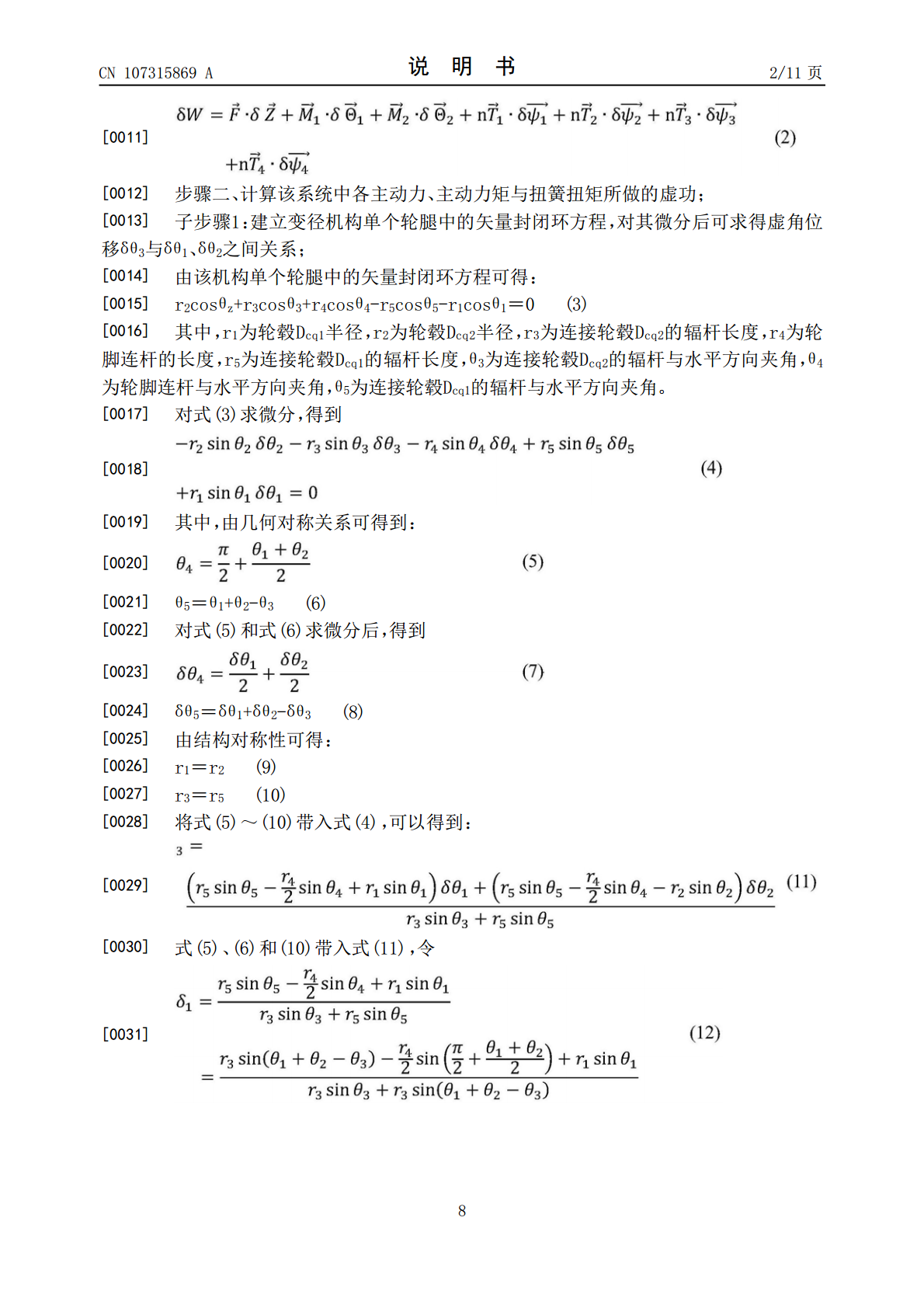
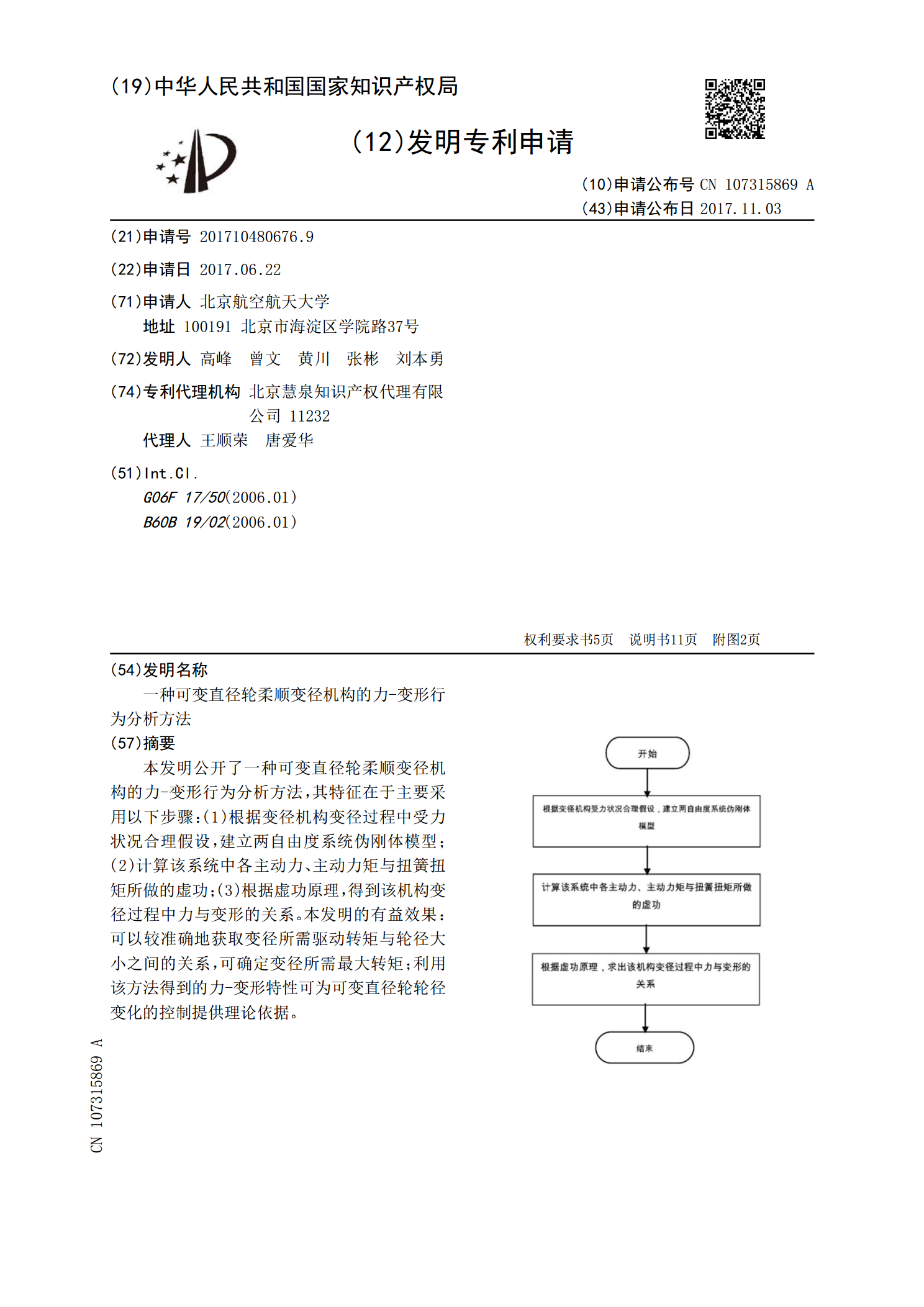
本发明公开了一种可变直径轮柔顺变径机构的力‑变形行为分析方法,其特征在于主要采用以下步骤:(1)根据变径机构变径过程中受力状况合理假设,建立两自由度系统伪刚体模型;(2)计算该系统中各主动力、主动力矩与扭簧扭矩所做的虚功;(3)根据虚功原理,得到该机构变径过程中力与变形的关系。本发明的有益效果:可以较准确地获取变径所需驱动转矩与轮径大小之间的关系,可确定变径所需最大转矩;利用该方法得到的力‑变形特性可为可变直径轮轮径变化的控制提供理论依据。
一种可变直径轮柔顺变径机构的设计方法.pdf
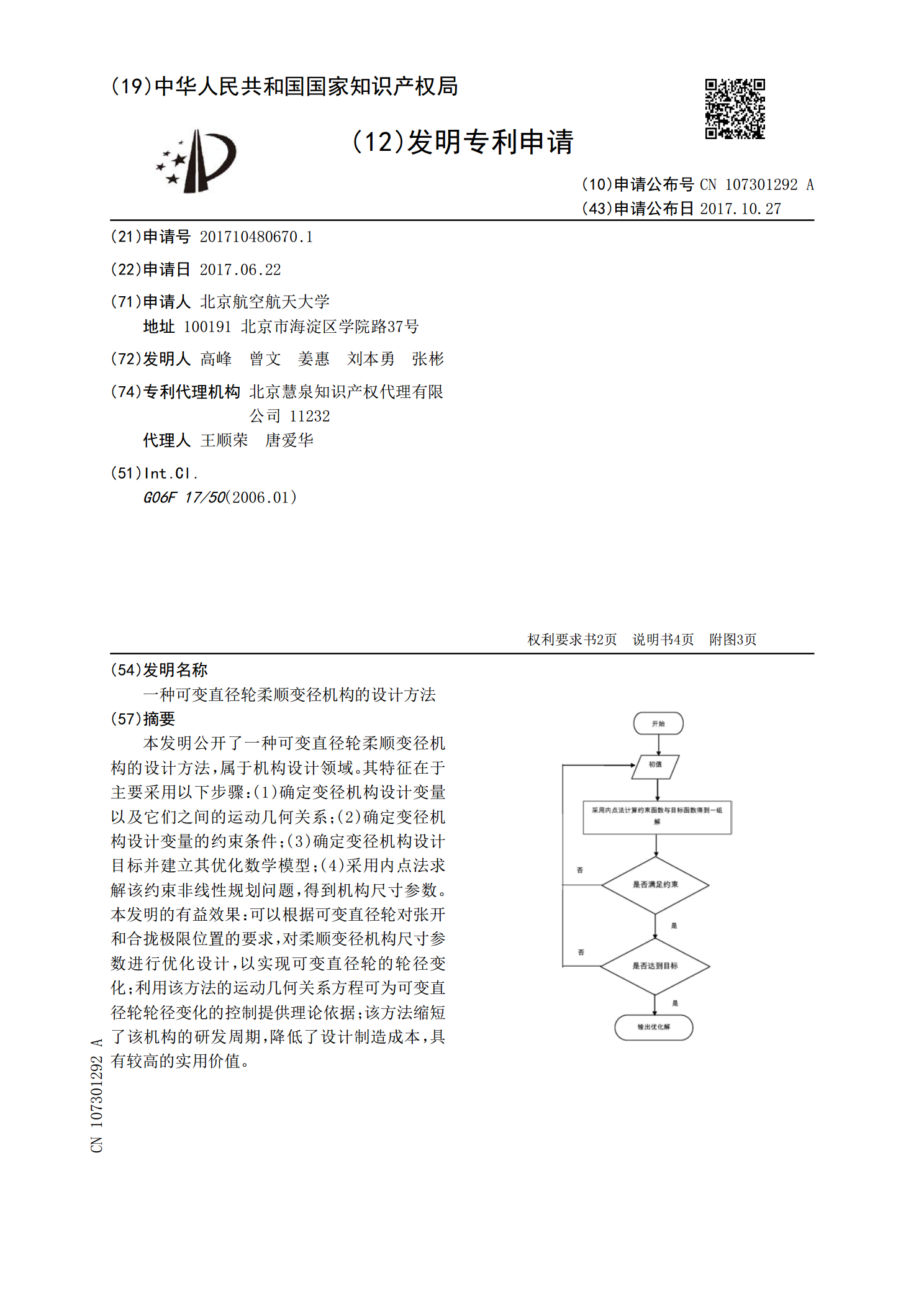
本发明公开了一种可变直径轮柔顺变径机构的设计方法,属于机构设计领域。其特征在于主要采用以下步骤:(1)确定变径机构设计变量以及它们之间的运动几何关系;(2)确定变径机构设计变量的约束条件;(3)确定变径机构设计目标并建立其优化数学模型;(4)采用内点法求解该约束非线性规划问题,得到机构尺寸参数。本发明的有益效果:可以根据可变直径轮对张开和合拢极限位置的要求,对柔顺变径机构尺寸参数进行优化设计,以实现可变直径轮的轮径变化;利用该方法的运动几何关系方程可为可变直径轮轮径变化的控制提供理论依据;该方法缩短了该机

一种适用于可变直径轮的变径机构.pdf
本发明公开了一种适用于可变直径轮的变径机构,该变径机构包括有摆动液压缸组件(1)、半轴套管(2)、行星轮系组件(5)、A轮毂(1A)、(B)轮毂(1B)、C轮毂(1C);摆动液压缸组件(1)、行星轮系组件(5)套接在半轴套管(2)上,A轮毂(1A)、B轮毂(1B)、C轮毂(1C)分别与行星轮系组件(5)上的A齿圈(502)、B齿圈(503)、C齿圈(504)的外部镶嵌连接。本发明变径机构采用摆动液压缸作为动力直接驱动变径行星轮系机构,比采用电机等驱动的方式对多栖环境的适应能力更强,变径能力可不受
可变轮径的变形轮.pdf
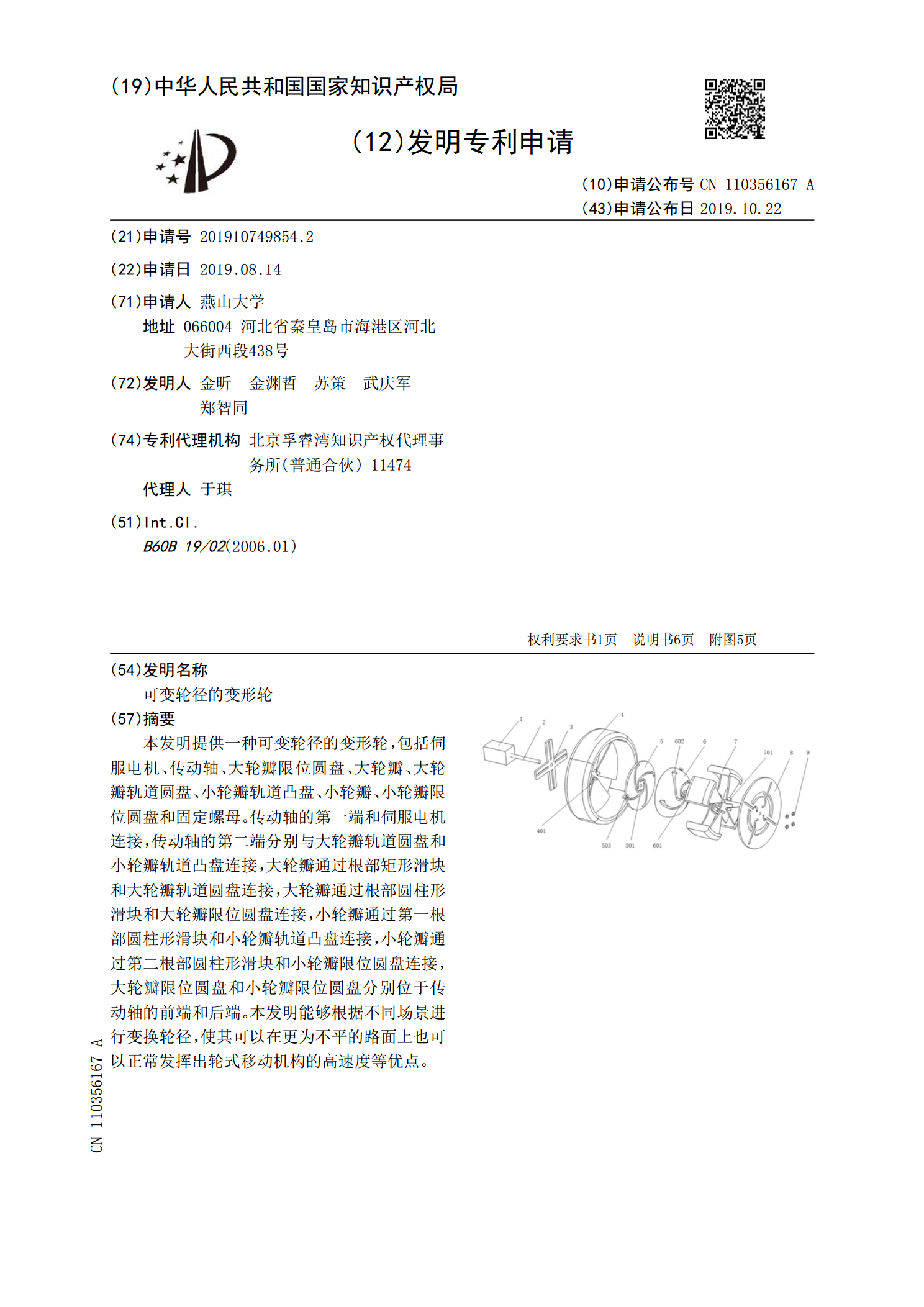
本发明提供一种可变轮径的变形轮,包括伺服电机、传动轴、大轮瓣限位圆盘、大轮瓣、大轮瓣轨道圆盘、小轮瓣轨道凸盘、小轮瓣、小轮瓣限位圆盘和固定螺母。传动轴的第一端和伺服电机连接,传动轴的第二端分别与大轮瓣轨道圆盘和小轮瓣轨道凸盘连接,大轮瓣通过根部矩形滑块和大轮瓣轨道圆盘连接,大轮瓣通过根部圆柱形滑块和大轮瓣限位圆盘连接,小轮瓣通过第一根部圆柱形滑块和小轮瓣轨道凸盘连接,小轮瓣通过第二根部圆柱形滑块和小轮瓣限位圆盘连接,大轮瓣限位圆盘和小轮瓣限位圆盘分别位于传动轴的前端和后端。本发明能够根据不同场景进行变换轮

一种适用于可变直径轮的摆动变径轮架.pdf
本发明公开了一种适用于可变直径轮的摆动变径轮架,该轮架由轮辐、弹性变径件和轮脚板组成,弹性变径件安装在轮辐与轮脚板之间,弹性变径件与轮辐的安装采用圆柱,而弹性变径件与轮脚板的安装采用了销轴。该摆动变径轮架通过B轮辐和D轮辐相对于C轮辐转动一定角度下,同时带动弹性变径件在轮辐圆周方向上产生螺旋扭转,使轮脚张开或合拢,从而实现可变直径轮的轮径可变。