
可变轮径的变形轮.pdf

婀娜****aj

1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可变轮径的变形轮.pdf
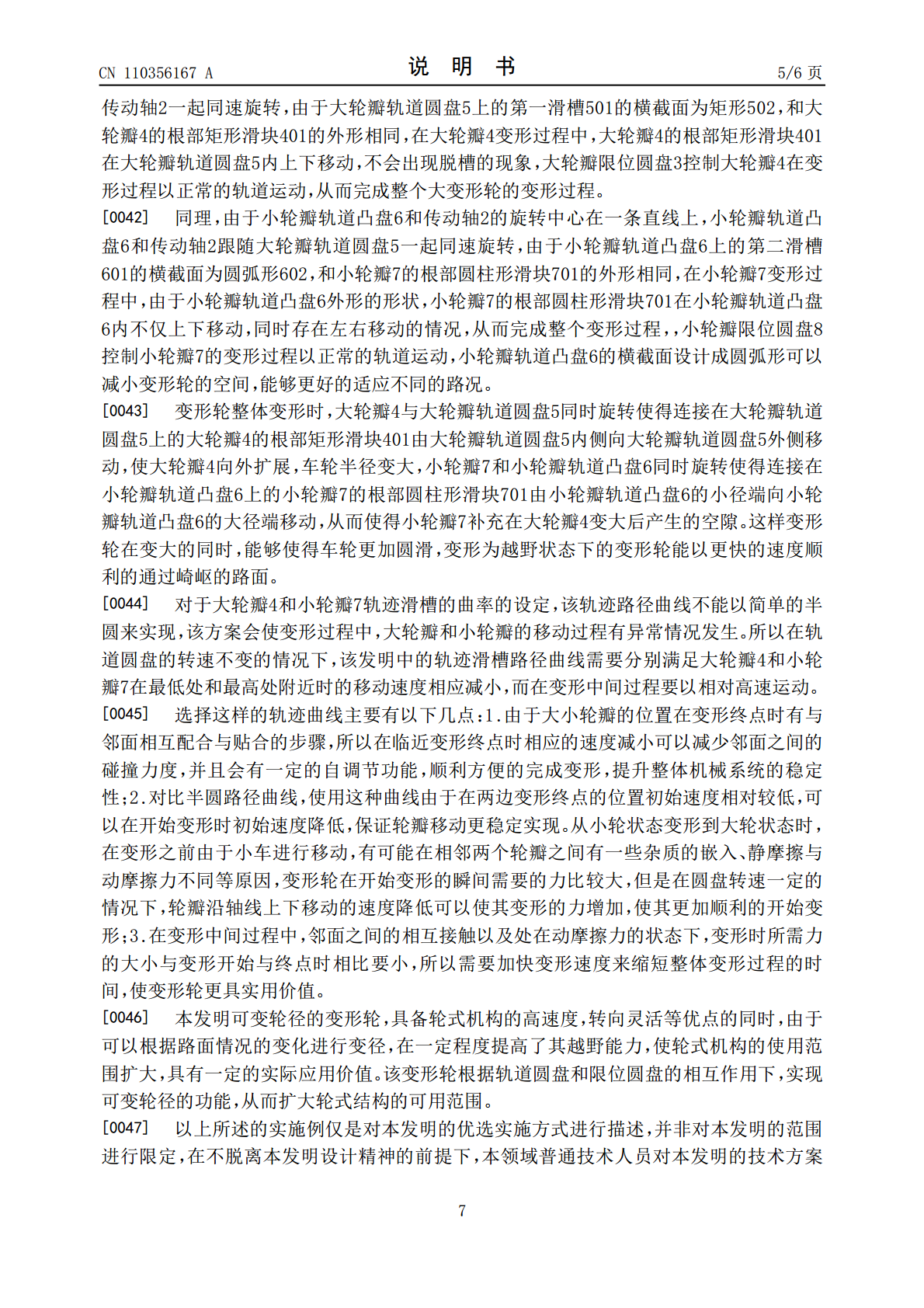
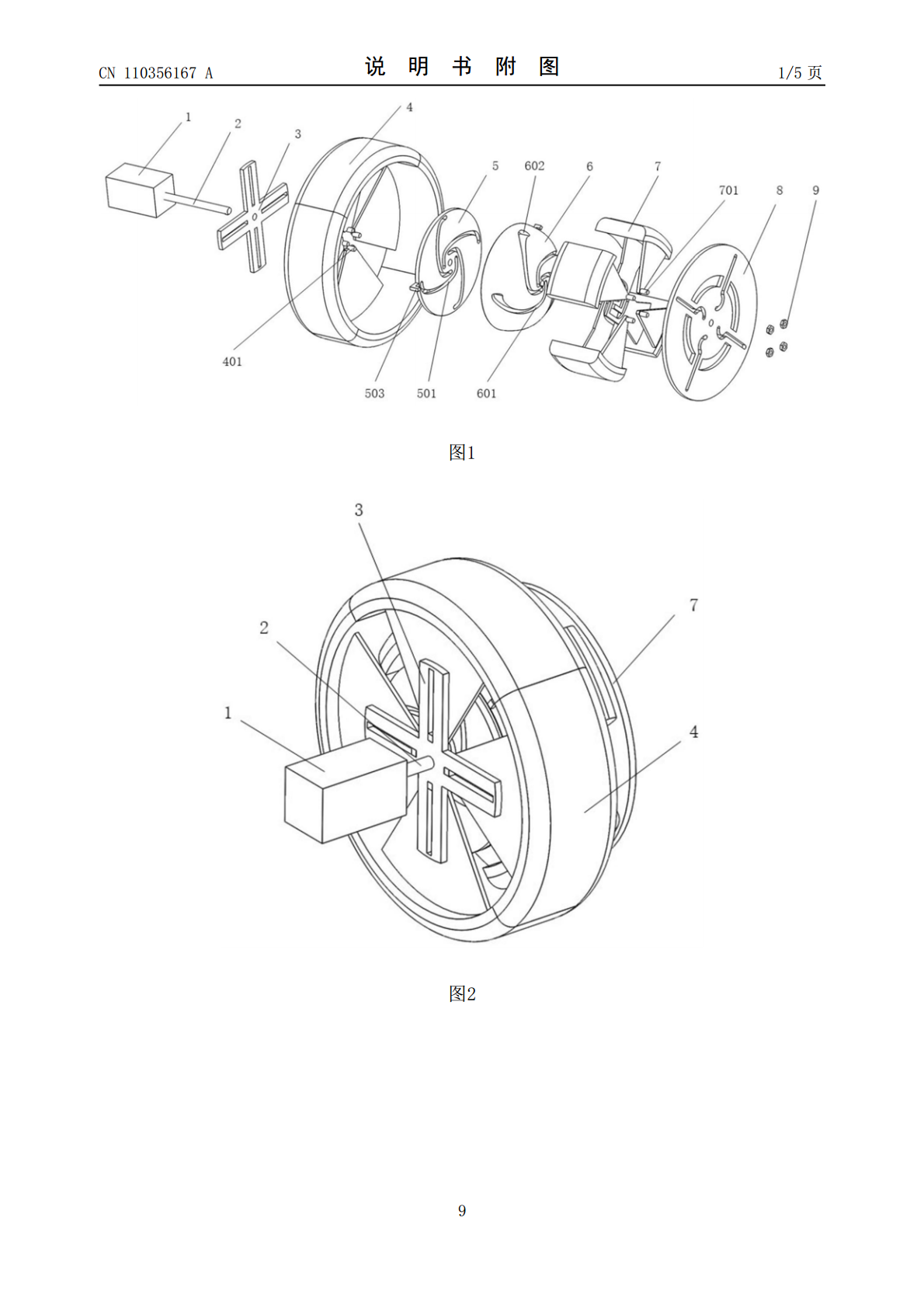
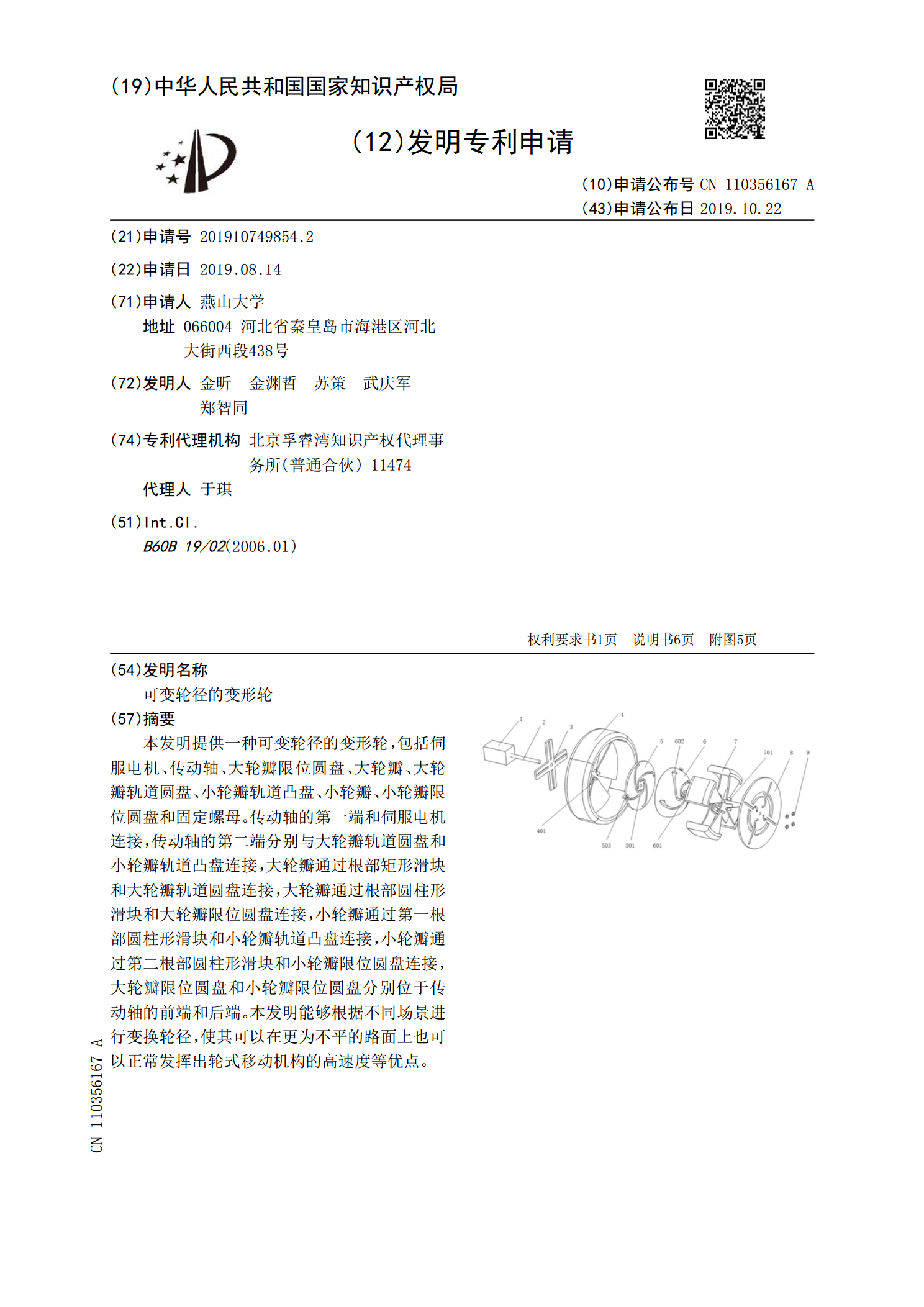
本发明提供一种可变轮径的变形轮,包括伺服电机、传动轴、大轮瓣限位圆盘、大轮瓣、大轮瓣轨道圆盘、小轮瓣轨道凸盘、小轮瓣、小轮瓣限位圆盘和固定螺母。传动轴的第一端和伺服电机连接,传动轴的第二端分别与大轮瓣轨道圆盘和小轮瓣轨道凸盘连接,大轮瓣通过根部矩形滑块和大轮瓣轨道圆盘连接,大轮瓣通过根部圆柱形滑块和大轮瓣限位圆盘连接,小轮瓣通过第一根部圆柱形滑块和小轮瓣轨道凸盘连接,小轮瓣通过第二根部圆柱形滑块和小轮瓣限位圆盘连接,大轮瓣限位圆盘和小轮瓣限位圆盘分别位于传动轴的前端和后端。本发明能够根据不同场景进行变换轮

可变径轮.pdf
本发明涉及一种可变径轮。该可变径轮包括:轮轴;可滑动地设在轮轴上的移动副;沿着轮轴的周向间隔开的多个连杆组件,每个连杆组件包括第一连杆和第二连杆,第一连杆的第一端与第二连杆的中部相铰接,第一连杆的第二端与移动副和轮轴中的一个相铰接,第二连杆的第一端与移动副和轮轴中的另一个相铰接;以及多个轮廓瓣,每个轮廓瓣分别设置在相应的第二连杆的第二端上,使得多个轮廓瓣形成可变径轮的多瓣式外周。本发明的可变径轮能够调整其多瓣式外周的外径。

可变径轮.pdf
本发明公开了一种可变径轮,其中,包括:一主轮,所述主轮外沿指向所述主轮轴心方向开设有多个滑动条,每一所述滑动条内均垂直穿过有一滑动轴,每一所述滑动轴的一端均固定有一扩张部;还包括一扩张轮,所述扩张轮与所述主轮同轴安装;所述扩张轮上开设有多条沿所述扩张轮轴心环状阵列分布的扩张条,每一所述滑动轴的另一端匹配伸入一扩张条内。本发明通过为主轮配套相应的扩张轮及扩张部,通过主轮与扩张轮的相对转动实现扩张部的扩张和收起扩张,无需增加额外的动力源,即可实现轮径的变化。

可变径皮带轮.pdf
本发明公开了一种可变径皮带轮。该皮带轮包括:导向圈,外周面周向均匀开设有多个轴向延伸的导向方孔;端盖,其为阶梯圆环状;芯轴,其为直筒状;滑块,其外周面呈锥形,并开设有与导向圈的导向方孔对应的多个倾斜燕尾槽;弧形圈,其为拼接成圆径的多块,各块弧形圈分别包括:圆弧面和布设在圆弧面内周面的倾斜燕尾齿,形成圆弧面拼接圆径的扩径或缩径;压缩弹簧一端抵住滑块大端,另一端抵住端盖内侧。该可变径皮带轮结构简单合理,结构简单合理,通过弹簧的弹力作用下,滑块沿着芯轴滑动,从而推动弧形圈沿径向涨开,获得较大近似圆径使得皮带轮直

可变轮径的车轮.pdf
本发明公开一种可变轮径的车轮,其包括有车轮外轮廓及用于驱动所述车轮外轮廓变形的变径装置,所述车轮外轮廓由数片小叶片首尾交叉相互连接而成。所述变径装置包括有一端与所述小叶片转动连接的偏心连杆,与所述偏心连杆固定连接的大齿轮,及用于驱动所述偏心连杆与所述大齿轮绕中心轴转动的驱动部分。本发明中可变轮径的车轮具有外轮廓可伸缩的特性,所以不仅有利于躲避障碍物,而且提高了复杂地面上行驶的平衡能力,减少了事故发生的几率,易于操作。