
一种机器人行走平衡装置.pdf

书生****35


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人行走平衡装置.pdf
本发明公开了一种机器人行走平衡装置,包括底座,所述底座内设有驱动腔,所述驱动腔内安装有第一驱动装置,所述底座的下方设有与驱动腔连通的安装口,所述安装口内卡接有套管,所述套管的外侧连接有限位环,所述安装口内设有用于卡接限位环的限位槽,所述套管内设有连接板,所述第一驱动装置的驱动端连接有螺纹杆,所述连接板上设有用于螺纹连接螺纹杆的螺纹口,所述底座的下方设有滚轮,所述滚轮的两侧连接有卡接框。本发明整个底座保持平衡状态,从而使得整个机器人外壳的稳定性得到保证,并且限位框和限位杆也会使得机器人外壳的稳定性得到提升,
一种导线行走机器人的行走装置.pdf
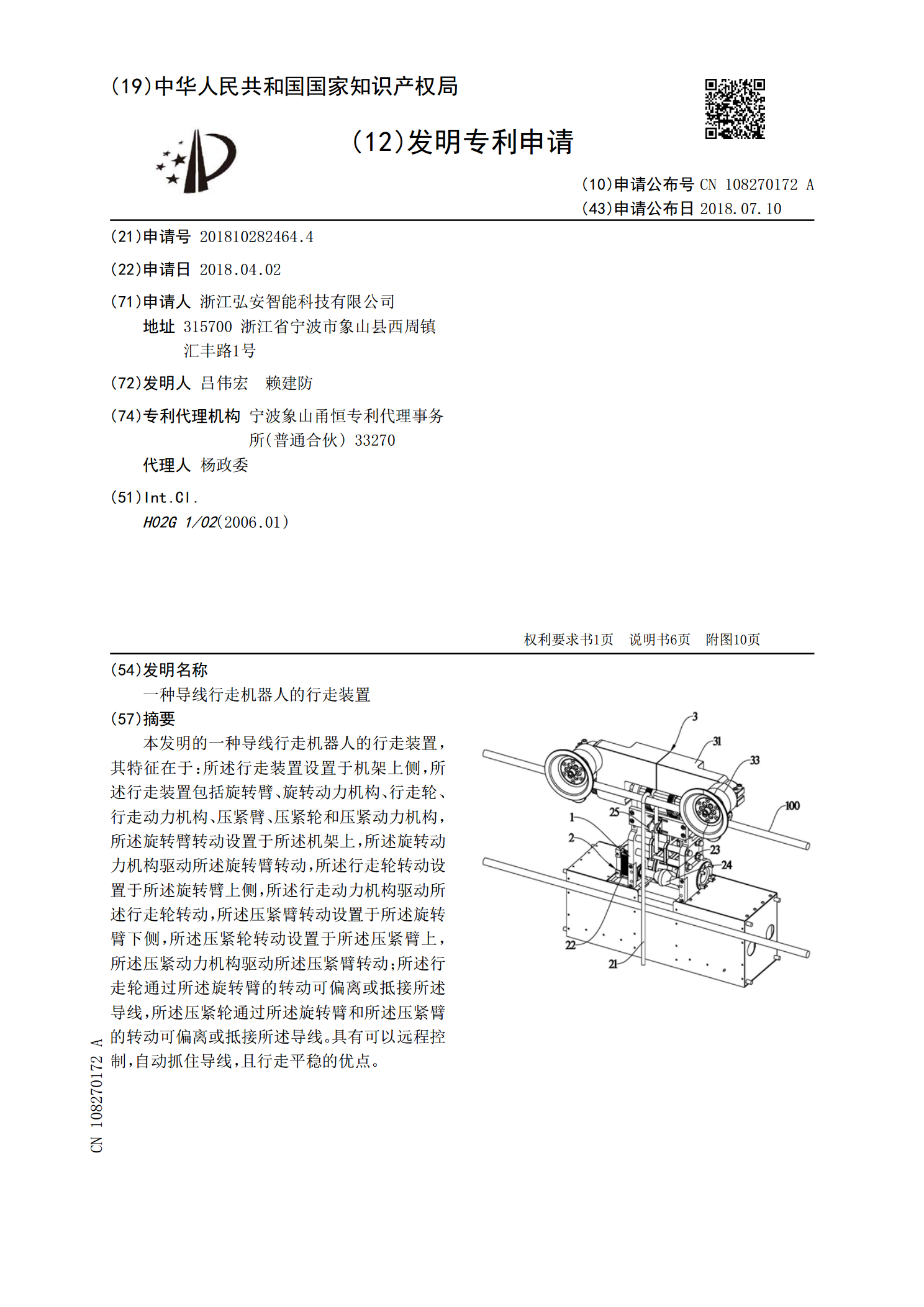
本发明的一种导线行走机器人的行走装置,其特征在于:所述行走装置设置于机架上侧,所述行走装置包括旋转臂、旋转动力机构、行走轮、行走动力机构、压紧臂、压紧轮和压紧动力机构,所述旋转臂转动设置于所述机架上,所述旋转动力机构驱动所述旋转臂转动,所述行走轮转动设置于所述旋转臂上侧,所述行走动力机构驱动所述行走轮转动,所述压紧臂转动设置于所述旋转臂下侧,所述压紧轮转动设置于所述压紧臂上,所述压紧动力机构驱动所述压紧臂转动;所述行走轮通过所述旋转臂的转动可偏离或抵接所述导线,所述压紧轮通过所述旋转臂和所述压紧臂的转动可

一种智能机器人的平衡装置.pdf
本发明公开一种智能机器人的平衡装置,包括底座、平衡器Ⅰ、面板Ⅰ、伸缩支柱Ⅰ、控制器Ⅰ、电线Ⅰ、感应片Ⅰ、平衡器Ⅱ、面板Ⅱ、伸缩支柱Ⅱ、控制器Ⅱ、电线Ⅱ和感应片Ⅱ,面板Ⅰ固定安装在底座底面,平衡器Ⅰ安装在面板Ⅰ上,至少两个伸缩支柱Ⅰ固定安装在面板Ⅰ上,电线Ⅰ一端连接在控制器Ⅰ上,电线Ⅰ另一端连接在感应片Ⅰ上,至少两个感应片Ⅰ安装在伸缩支柱Ⅰ上,可以快速准确的测量出滚轮的平衡度,不会出现有误差情况的发生,使其受力均匀,不会出现受力大的零件损坏严重,延长了零件的使用寿命,不需要浪费工作人员的时间进行更换。

一种工业机器人的平衡装置.pdf
本发明涉及一种工业机器人的平衡装置,所述平衡装置设置于机器人的大臂和大臂驱动电机之间并与下方的转盘固定连接,所述平衡装置与大臂之间刚性连接;所述平衡装置由支架、丝杠、连接板和电机组成,电机驱动丝杠,丝杠与连接板螺纹连接,连接板与大臂相连,支架的下方与转盘固定连接;所述支架内固定设置有直线导轨,连接板与直线导轨滑动连接;所述丝杠和电机通过设置锥齿轮啮合传动,所述丝杠的两端通过滚动轴承固定在支架上。这种平衡装置能够实时主动平衡,不产生阻碍的反作用,并且能够延长电机、减速器的使用寿命。
一种关节机器人的平衡装置.pdf
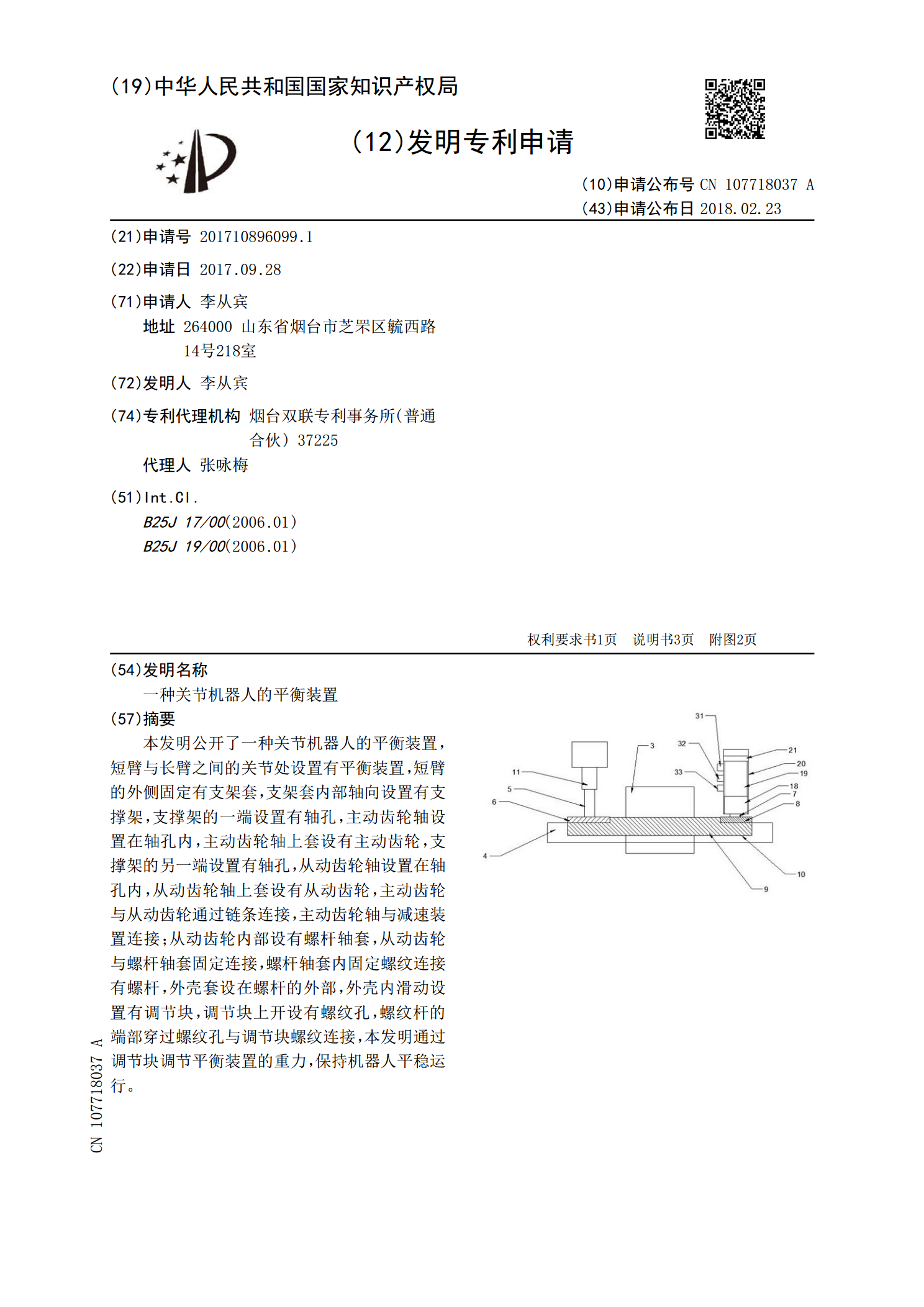
本发明公开了一种关节机器人的平衡装置,短臂与长臂之间的关节处设置有平衡装置,短臂的外侧固定有支架套,支架套内部轴向设置有支撑架,支撑架的一端设置有轴孔,主动齿轮轴设置在轴孔内,主动齿轮轴上套设有主动齿轮,支撑架的另一端设置有轴孔,从动齿轮轴设置在轴孔内,从动齿轮轴上套设有从动齿轮,主动齿轮与从动齿轮通过链条连接,主动齿轮轴与减速装置连接;从动齿轮内部设有螺杆轴套,从动齿轮与螺杆轴套固定连接,螺杆轴套内固定螺纹连接有螺杆,外壳套设在螺杆的外部,外壳内滑动设置有调节块,调节块上开设有螺纹孔,螺纹杆的端部穿过螺