
一种导线行走机器人的行走装置.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种导线行走机器人的行走装置.pdf
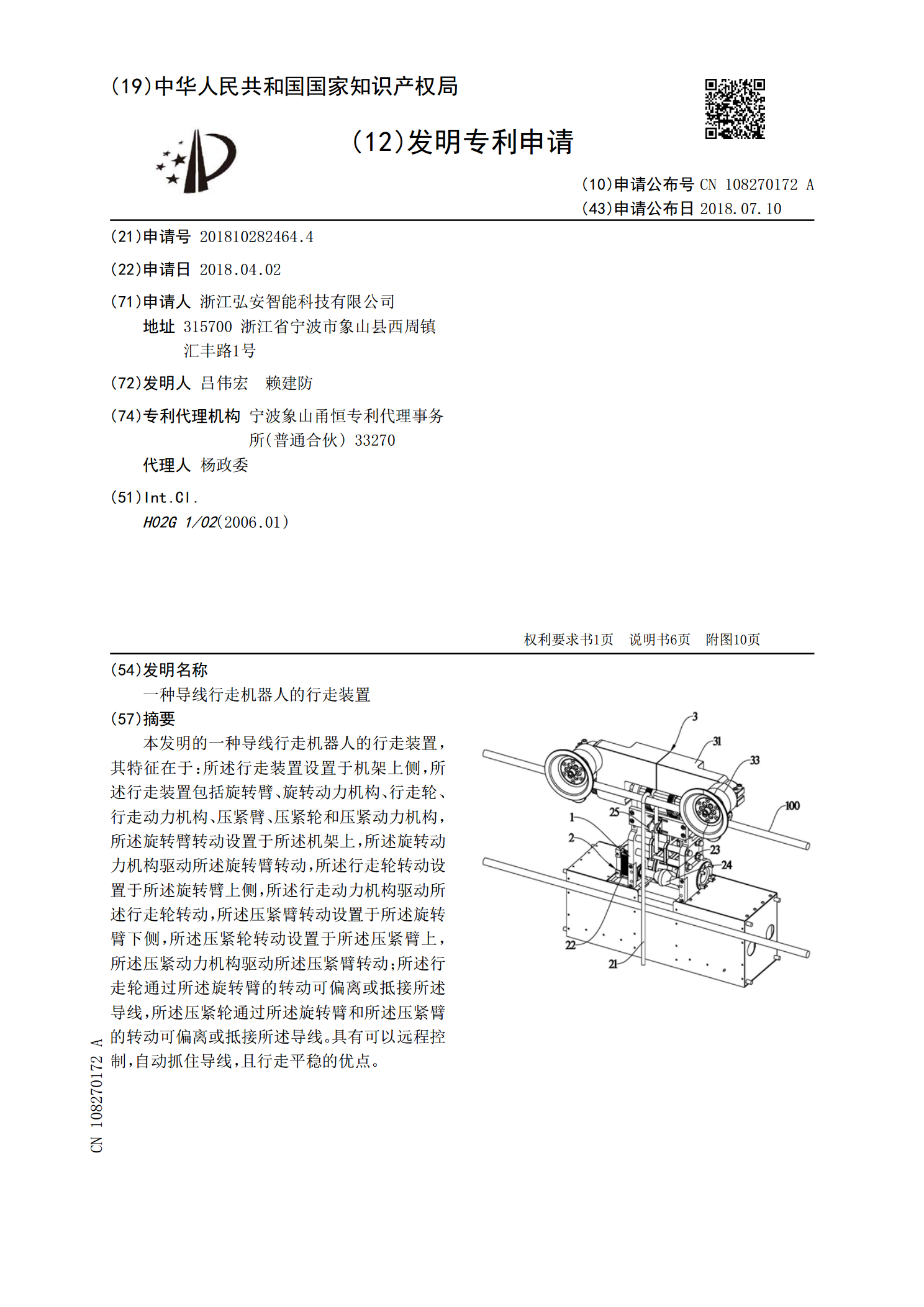
本发明的一种导线行走机器人的行走装置,其特征在于:所述行走装置设置于机架上侧,所述行走装置包括旋转臂、旋转动力机构、行走轮、行走动力机构、压紧臂、压紧轮和压紧动力机构,所述旋转臂转动设置于所述机架上,所述旋转动力机构驱动所述旋转臂转动,所述行走轮转动设置于所述旋转臂上侧,所述行走动力机构驱动所述行走轮转动,所述压紧臂转动设置于所述旋转臂下侧,所述压紧轮转动设置于所述压紧臂上,所述压紧动力机构驱动所述压紧臂转动;所述行走轮通过所述旋转臂的转动可偏离或抵接所述导线,所述压紧轮通过所述旋转臂和所述压紧臂的转动可

一种导线可越障机器人行走装置.pdf
本发明提出了一种导线可越障机器人行走装置,其采用双臂三关节轮式结构,越障时双臂交替握线以避开障碍,行走时采用轮以保证行驶速度,包括前行走轮1、后行走轮2、前压紧轮3、后压紧轮4、前行走轮臂5、后行走轮臂6、前压紧轮臂7、后压紧轮臂8、四个前电机9、四个后电机10、前关节臂11、后关节臂12和本体13。本机器人行走装置可以跨越典型导线障碍如防振锤、压接管、间隔棒、悬垂线夹等,可作为高压输电线路巡线机器人以及导线除冰机器人行走装置。该平台具有机构较为简单,控制方式简单,控制精度要求较低,行走及越障速
一种导线行走机器人.pdf
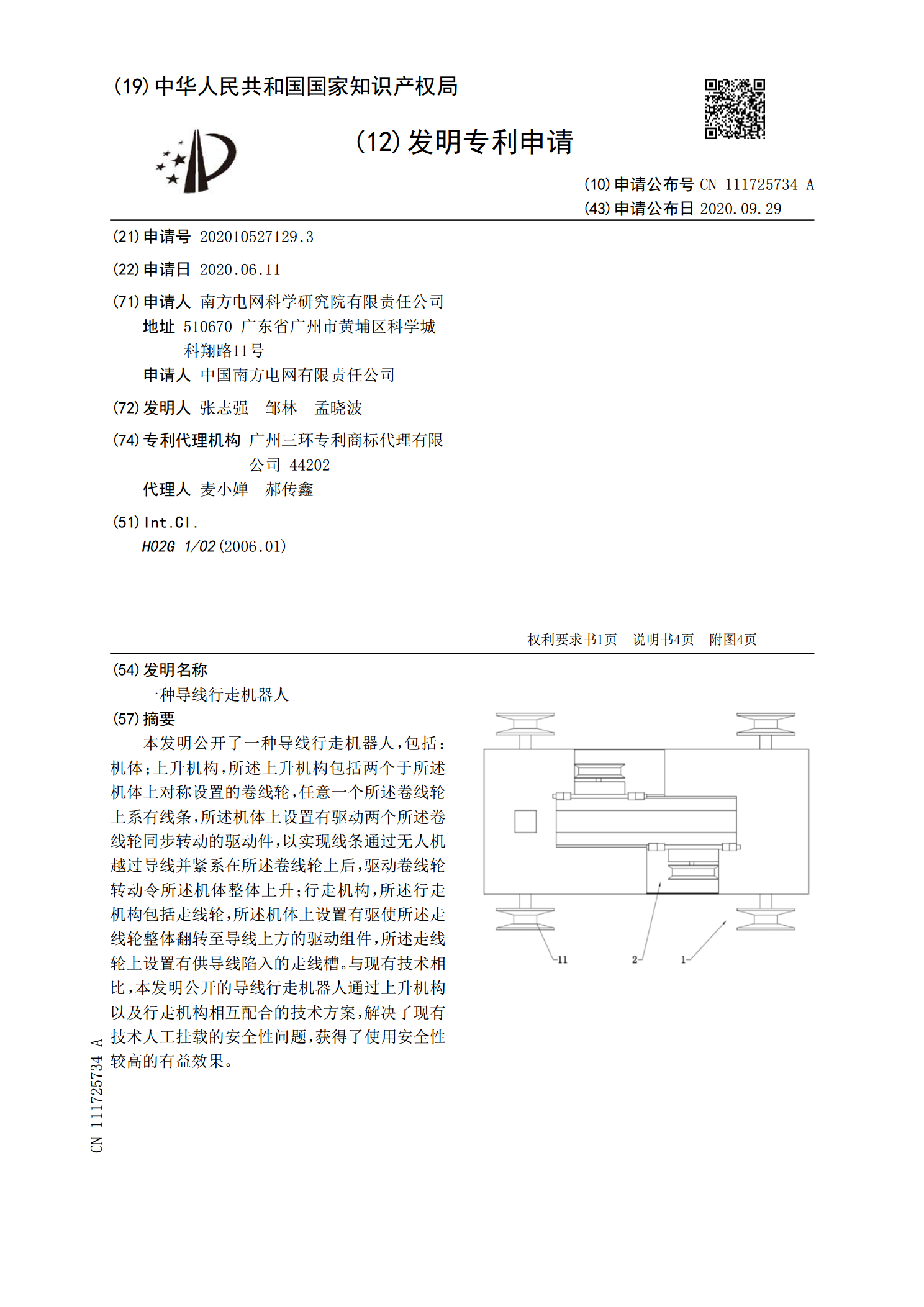
本发明公开了一种导线行走机器人,包括:机体;上升机构,所述上升机构包括两个于所述机体上对称设置的卷线轮,任意一个所述卷线轮上系有线条,所述机体上设置有驱动两个所述卷线轮同步转动的驱动件,以实现线条通过无人机越过导线并紧系在所述卷线轮上后,驱动卷线轮转动令所述机体整体上升;行走机构,所述行走机构包括走线轮,所述机体上设置有驱使所述走线轮整体翻转至导线上方的驱动组件,所述走线轮上设置有供导线陷入的走线槽。与现有技术相比,本发明公开的导线行走机器人通过上升机构以及行走机构相互配合的技术方案,解决了现有技术人工挂

双臂导线检查机器人的行走装置.pdf
本发明涉及一种双臂导线检查机器人的行走装置,包括主体,在主体上装设有行走架,所述行走架包括设置在主体两侧可转动的摇臂,在摇臂上部设置有可向外伸展的伸缩臂,在两伸缩臂上部间装设有单独的行走装置,或在两伸缩臂上部均装设有行走装置,形成双行走装置,所述行走装置具有行走轮,行走轮在导线上滚动。本申请结构简单,容易操作,主要应用于新建线路验收或由于运行不当、大型车辆刮碰导线等造成导线损伤时,机器人能够在近距离观察导线情况,并通过无线视频系统回传到显示器上,供检查人员分析,减少了人员在线路作业的危险性,提高了输电线路

一种带电导线行走装置.pdf
一种带电导线行走装置,涉及一种导线行走装置,轮子的外表面设置为橡胶轮(9),所述橡胶轮(9)的轮面设有环绕的U形轮槽(2),在橡胶轮(9)内设有轴承套,轴承(11)设置在轴承套内,“7”形挂杆(4)上部形成的水平轴(3)连接轴承套内所述轴承(11)的内圈,“7”形挂杆(4)下端连接手柄(5)的上端,所述手柄(5)的下端设有钩子(6),钩子(6)下部为牵引片(7);本发明利用轮子外部的橡胶轮与形成导线的柔性接触,方便了在带电导线上运送物品。