
独立减震的机器人底盘驱动轮组.pdf

依波****bc

1/6
2/6

3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
独立减震的机器人底盘驱动轮组.pdf
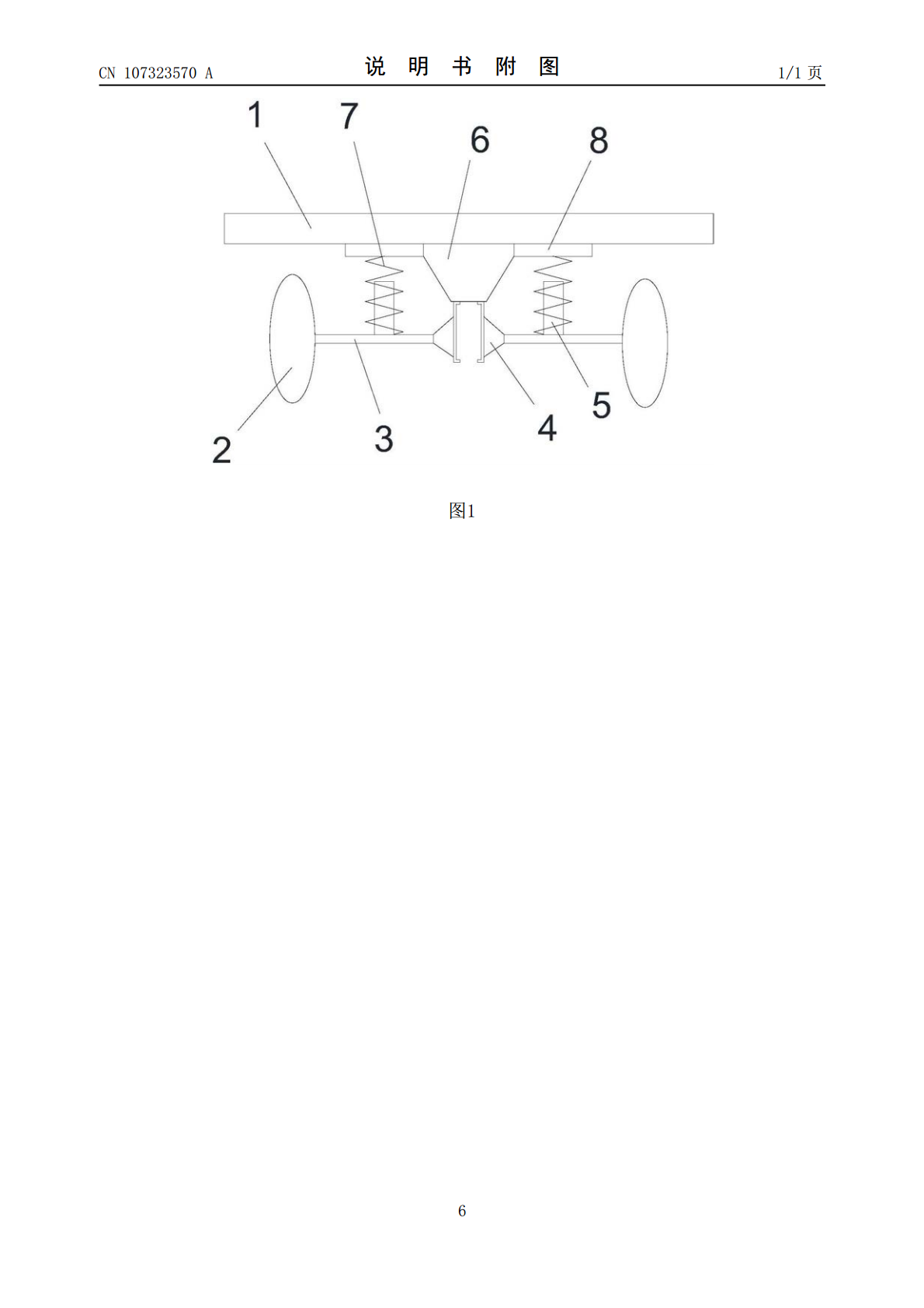
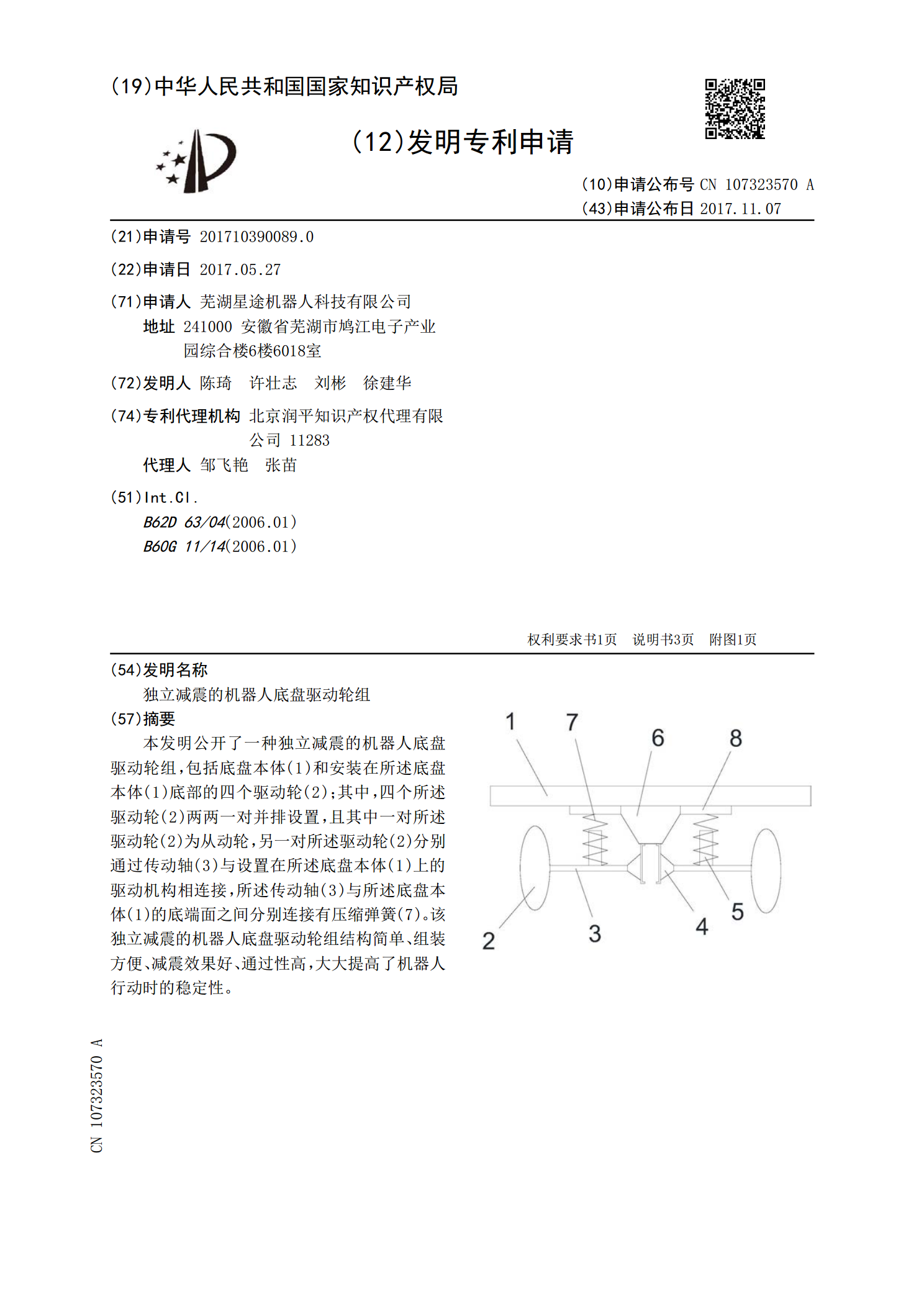
本发明公开了一种独立减震的机器人底盘驱动轮组,包括底盘本体(1)和安装在所述底盘本体(1)底部的四个驱动轮(2);其中,四个所述驱动轮(2)两两一对并排设置,且其中一对所述驱动轮(2)为从动轮,另一对所述驱动轮(2)分别通过传动轴(3)与设置在所述底盘本体(1)上的驱动机构相连接,所述传动轴(3)与所述底盘本体(1)的底端面之间分别连接有压缩弹簧(7)。该独立减震的机器人底盘驱动轮组结构简单、组装方便、减震效果好、通过性高,大大提高了机器人行动时的稳定性。

机器人底盘驱动轮组.pdf
本发明公开了一种机器人底盘驱动轮组,包括底盘本体(1)和安装在所述底盘本体(1)底部的两对驱动轮(2);其中,两对所述驱动轮(2)并排设置,且其中一对所述驱动轮(2)为从动轮,另一对所述驱动轮(2)分别通过传动轴(3)与驱动机构相连接,所述驱动机构通过弹性件与所述底盘本体(1)的底端面相连接。该机器人底盘驱动轮组结构简单、组装方便、减震效果好、通过性高,大大提高了机器人行动时的稳定性。
多弹簧的机器人底盘驱动轮组.pdf
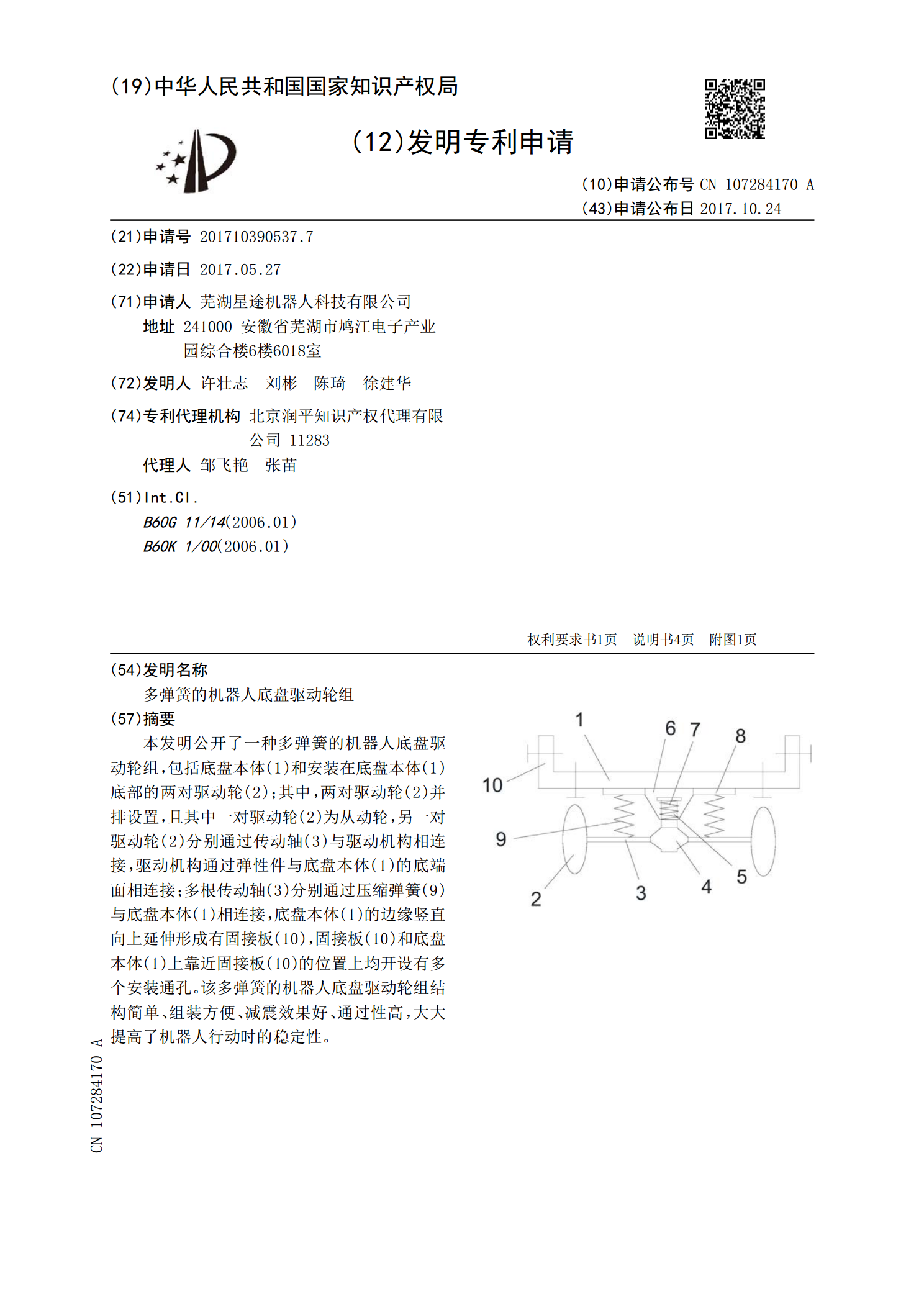
本发明公开了一种多弹簧的机器人底盘驱动轮组,包括底盘本体(1)和安装在底盘本体(1)底部的两对驱动轮(2);其中,两对驱动轮(2)并排设置,且其中一对驱动轮(2)为从动轮,另一对驱动轮(2)分别通过传动轴(3)与驱动机构相连接,驱动机构通过弹性件与底盘本体(1)的底端面相连接;多根传动轴(3)分别通过压缩弹簧(9)与底盘本体(1)相连接,底盘本体(1)的边缘竖直向上延伸形成有固接板(10),固接板(10)和底盘本体(1)上靠近固接板(10)的位置上均开设有多个安装通孔。该多弹簧的机器人底盘驱动轮组结构简单
运动底盘上的驱动轮控制方法、装置、底盘和机器人.pdf
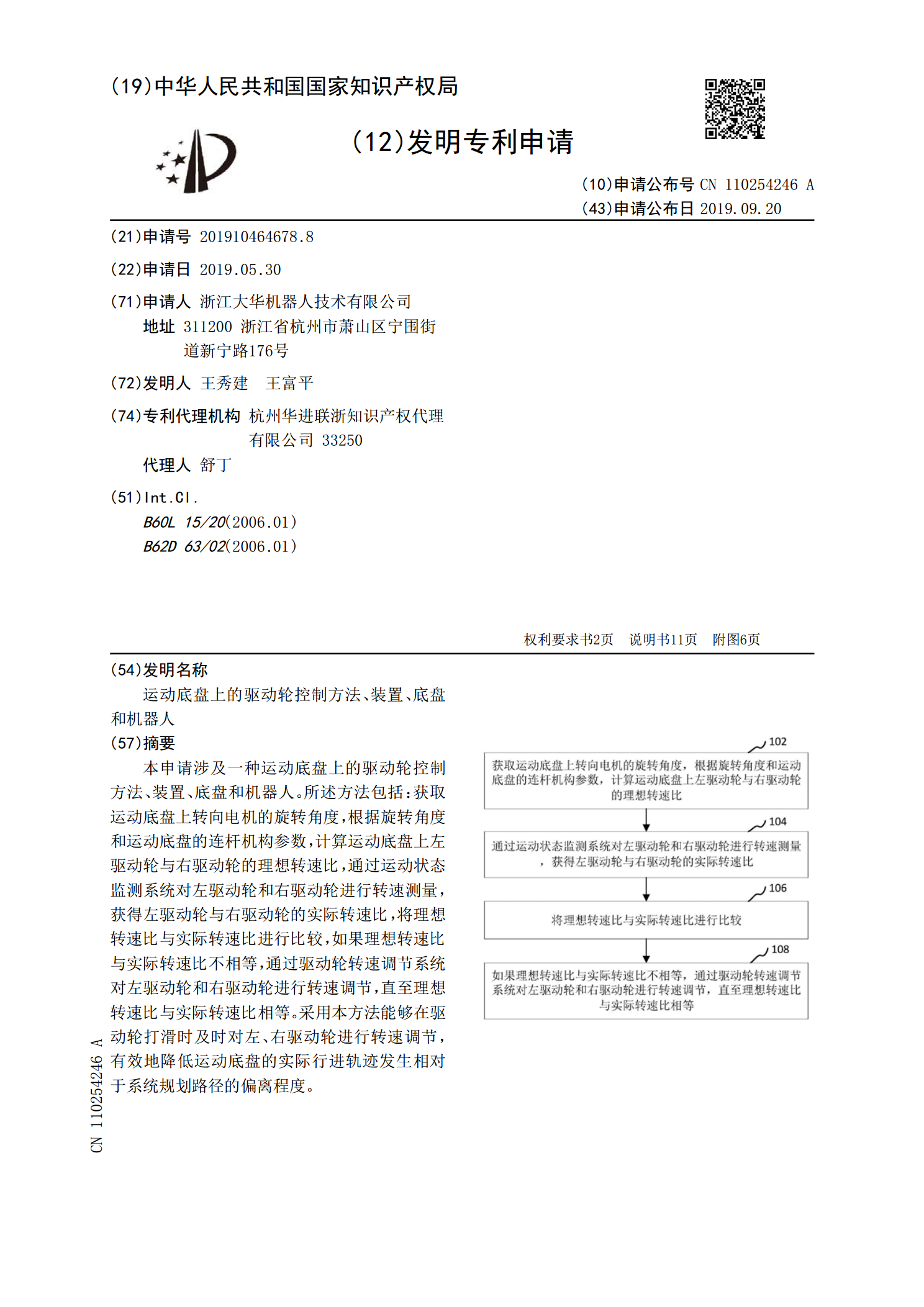
本申请涉及一种运动底盘上的驱动轮控制方法、装置、底盘和机器人。所述方法包括:获取运动底盘上转向电机的旋转角度,根据旋转角度和运动底盘的连杆机构参数,计算运动底盘上左驱动轮与右驱动轮的理想转速比,通过运动状态监测系统对左驱动轮和右驱动轮进行转速测量,获得左驱动轮与右驱动轮的实际转速比,将理想转速比与实际转速比进行比较,如果理想转速比与实际转速比不相等,通过驱动轮转速调节系统对左驱动轮和右驱动轮进行转速调节,直至理想转速比与实际转速比相等。采用本方法能够在驱动轮打滑时及时对左、右驱动轮进行转速调节,有效地降低
一种送菜机器人的减震底盘.pdf
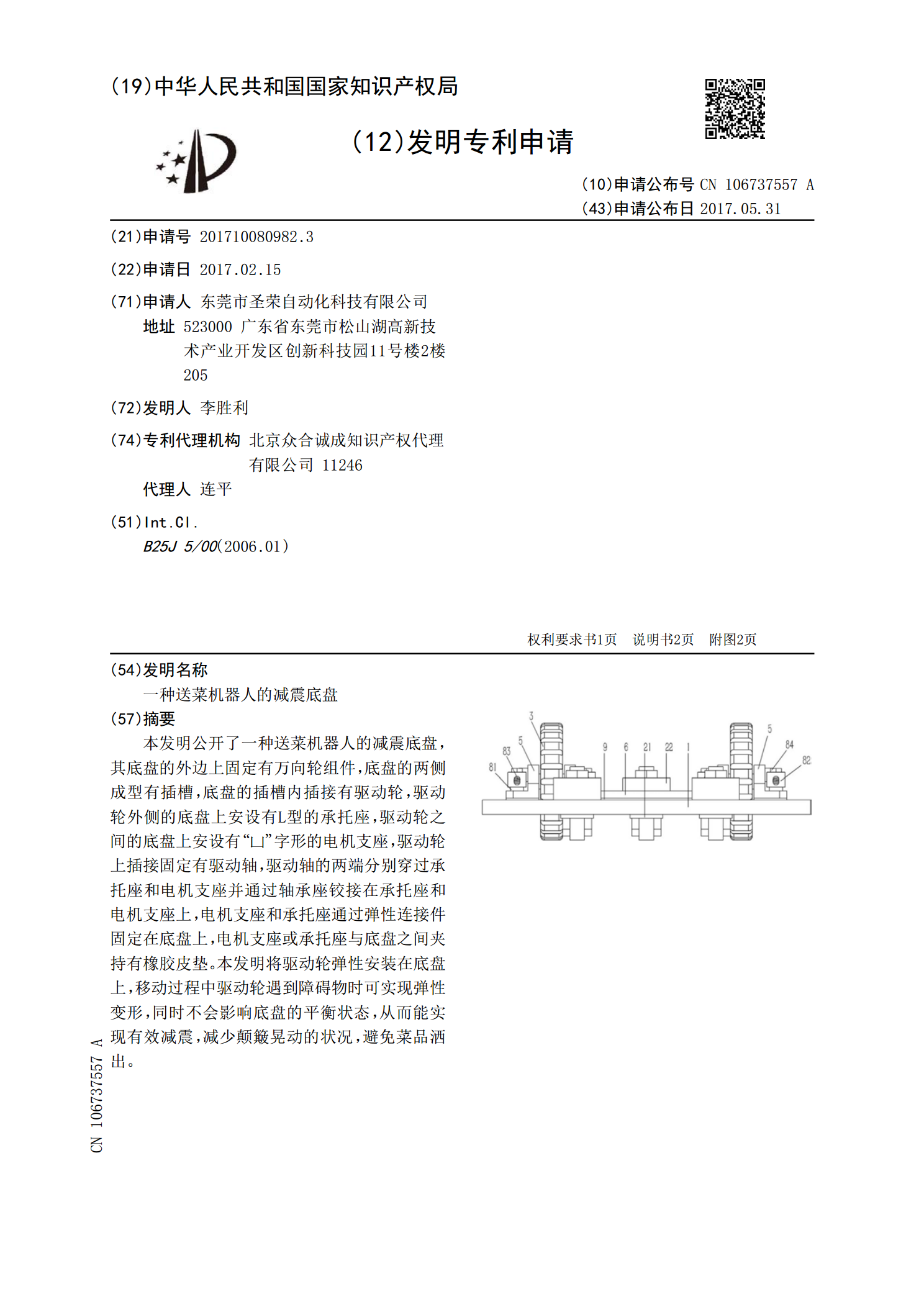
本发明公开了一种送菜机器人的减震底盘,其底盘的外边上固定有万向轮组件,底盘的两侧成型有插槽,底盘的插槽内插接有驱动轮,驱动轮外侧的底盘上安设有L型的承托座,驱动轮之间的底盘上安设有“凵”字形的电机支座,驱动轮上插接固定有驱动轴,驱动轴的两端分别穿过承托座和电机支座并通过轴承座铰接在承托座和电机支座上,电机支座和承托座通过弹性连接件固定在底盘上,电机支座或承托座与底盘之间夹持有橡胶皮垫。本发明将驱动轮弹性安装在底盘上,移动过程中驱动轮遇到障碍物时可实现弹性变形,同时不会影响底盘的平衡状态,从而能实现有效减震