
一种易实现壁面吸附的幕墙机器人及控制方法.pdf

是你****优呀


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种易实现壁面吸附的幕墙机器人及控制方法.pdf
本发明公开了一种易实现壁面吸附的幕墙机器人及控制方法,所述幕墙机器人包括固定框架、若干个吸盘、若干个滚轮、若干个可伸缩清洁刮板和至少一个风机单元;所述幕墙机器人行走方向上的前端通过楼顶的保险绳悬挂于待吸附壁面一侧;所述风机单元固定于所述固定框架上且吹风方向为远离待吸附的壁面的方向以实现在悬挂时使幕墙机器人整体靠近待吸附的壁面;所述吸盘固定设置于所述固定框架上用于吸附壁面;所述可伸缩清洁刮板分别设置于行走方向上的幕墙机器人的前后两端且可实现垂直于待吸附的壁面方向上的伸缩以配合所述风机单元和所述吸盘完成吸附壁
一种可实现直角壁面过渡的永磁吸附爬壁机器人.pdf
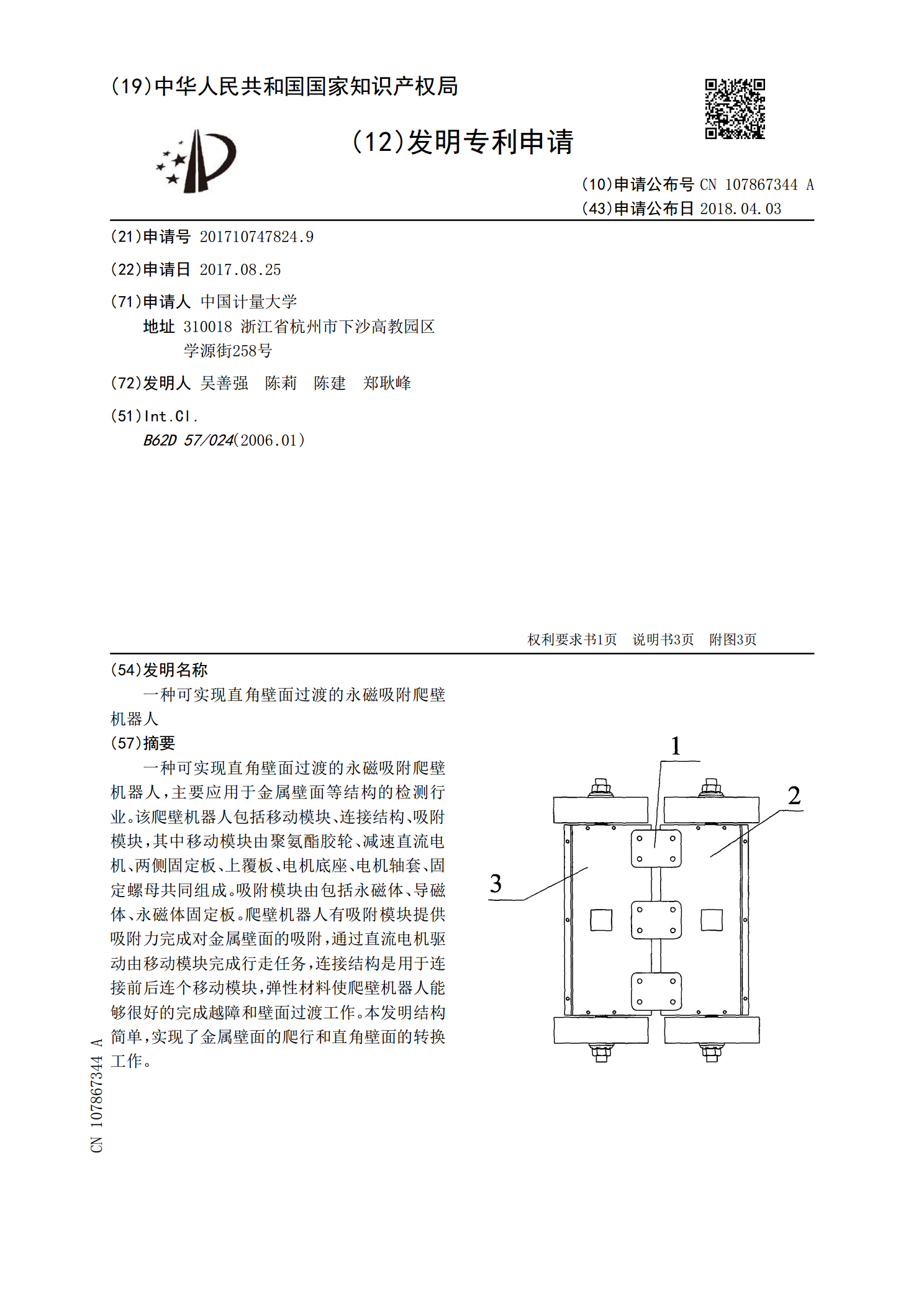
一种可实现直角壁面过渡的永磁吸附爬壁机器人,主要应用于金属壁面等结构的检测行业。该爬壁机器人包括移动模块、连接结构、吸附模块,其中移动模块由聚氨酯胶轮、减速直流电机、两侧固定板、上覆板、电机底座、电机轴套、固定螺母共同组成。吸附模块由包括永磁体、导磁体、永磁体固定板。爬壁机器人有吸附模块提供吸附力完成对金属壁面的吸附,通过直流电机驱动由移动模块完成行走任务,连接结构是用于连接前后连个移动模块,弹性材料使爬壁机器人能够很好的完成越障和壁面过渡工作。本发明结构简单,实现了金属壁面的爬行和直角壁面的转换工作。

一种壁面检测救援机器人及其控制方法.pdf
本发明公开了一种壁面检测救援机器人及其控制方法,总体结构包括机器人本体、控制系统、楼顶安全保护系统。机器人本体包括旋转台、驱动轮、驱动电机、吸盘、机械臂、摄像头、喷涂装置等;楼顶安全保护装置包括随动小车、卷扬机构和钢丝绳等,承受系统的一部分自重,并随机器人一起运动。本发明能够实现机器人在高层建筑物表面实时检测瓷砖和玻璃等的贴合情况以及裂缝状况,并且当瓷砖或玻璃松动时可以利用自身携带的喷涂装置自动将松动处涂上颜料标记出来,方便维修人员更换,此外,当紧急状况发生时,可以破窗进入室内,展开救援。
一种具有壁面过渡能力的履带式磁吸附爬壁机器人.pdf
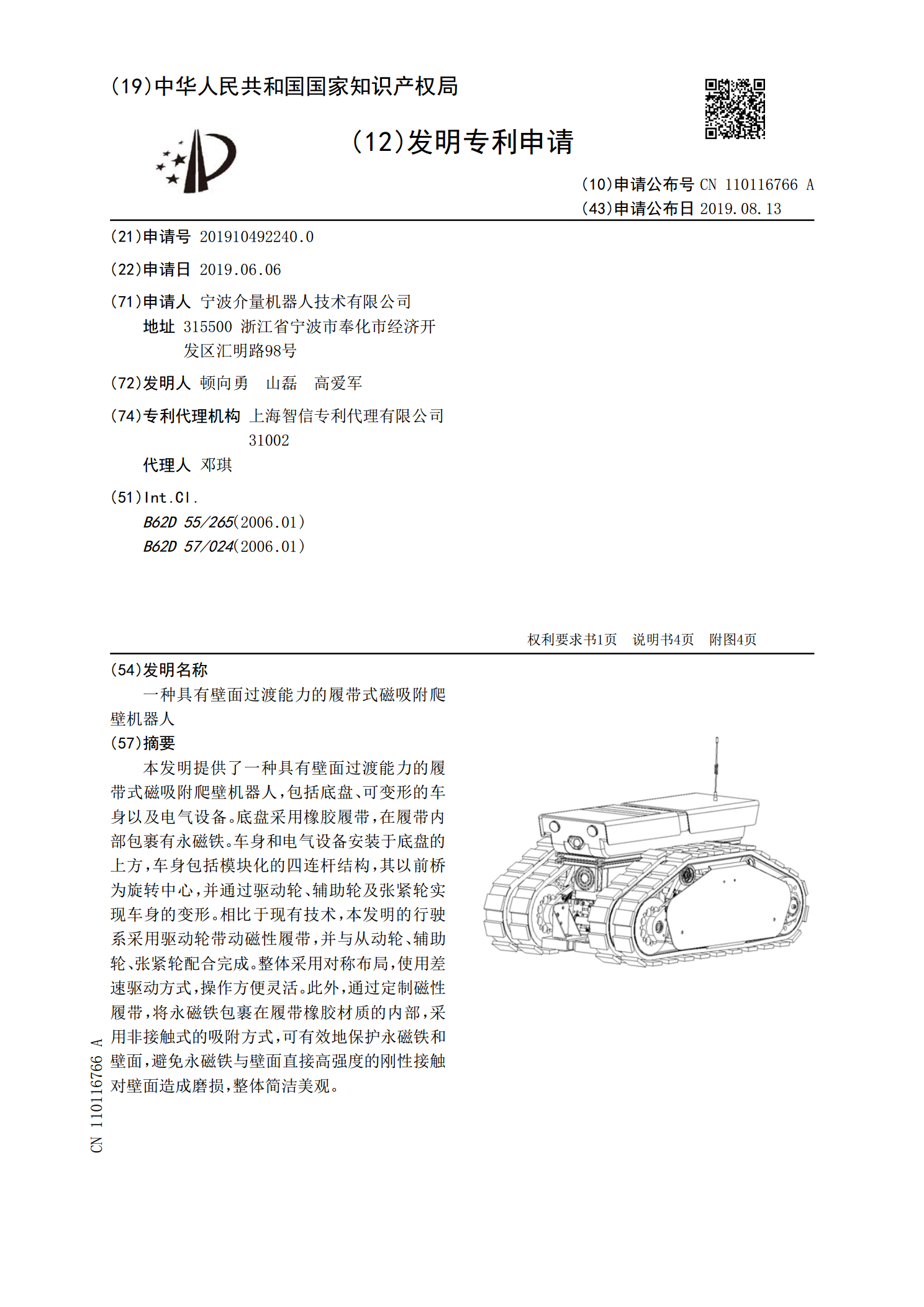
本发明提供了一种具有壁面过渡能力的履带式磁吸附爬壁机器人,包括底盘、可变形的车身以及电气设备。底盘采用橡胶履带,在履带内部包裹有永磁铁。车身和电气设备安装于底盘的上方,车身包括模块化的四连杆结构,其以前桥为旋转中心,并通过驱动轮、辅助轮及张紧轮实现车身的变形。相比于现有技术,本发明的行驶系采用驱动轮带动磁性履带,并与从动轮、辅助轮、张紧轮配合完成。整体采用对称布局,使用差速驱动方式,操作方便灵活。此外,通过定制磁性履带,将永磁铁包裹在履带橡胶材质的内部,采用非接触式的吸附方式,可有效地保护永磁铁和壁面,避

一种弧面自贴合磁吸附爬壁检测机器人.pdf
本发明公开了一种弧面自贴合磁吸附爬壁检测机器人,其特征在于该机器人包括中间主车架、安全防护机构、浮动车架、摆动磁吸附轮组、编码器轮浮动机构和无损检测往复机构。该机器人为框架式开放结构,重量轻,吸附力更大,运动更灵活,行走更稳定,检测更准确,易于加工,易于拆装。由于本机器人具有较多的被动自由度,加装弹簧限制过于灵活的被动自由度,且能起到减震作用,因而无论壁面为何种弧面,机器人处于任何位姿,机器人四个磁吸附轮都能垂直于曲面切面行走。当磁轮垂直于曲面切面即夹角为90度时,磁吸附单元的磁利用率最高,磁力也最大,机