
一种基于轮毂电机驱动的悬架机构.pdf

努力****星驰


1/7

2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于轮毂电机驱动的悬架机构.pdf
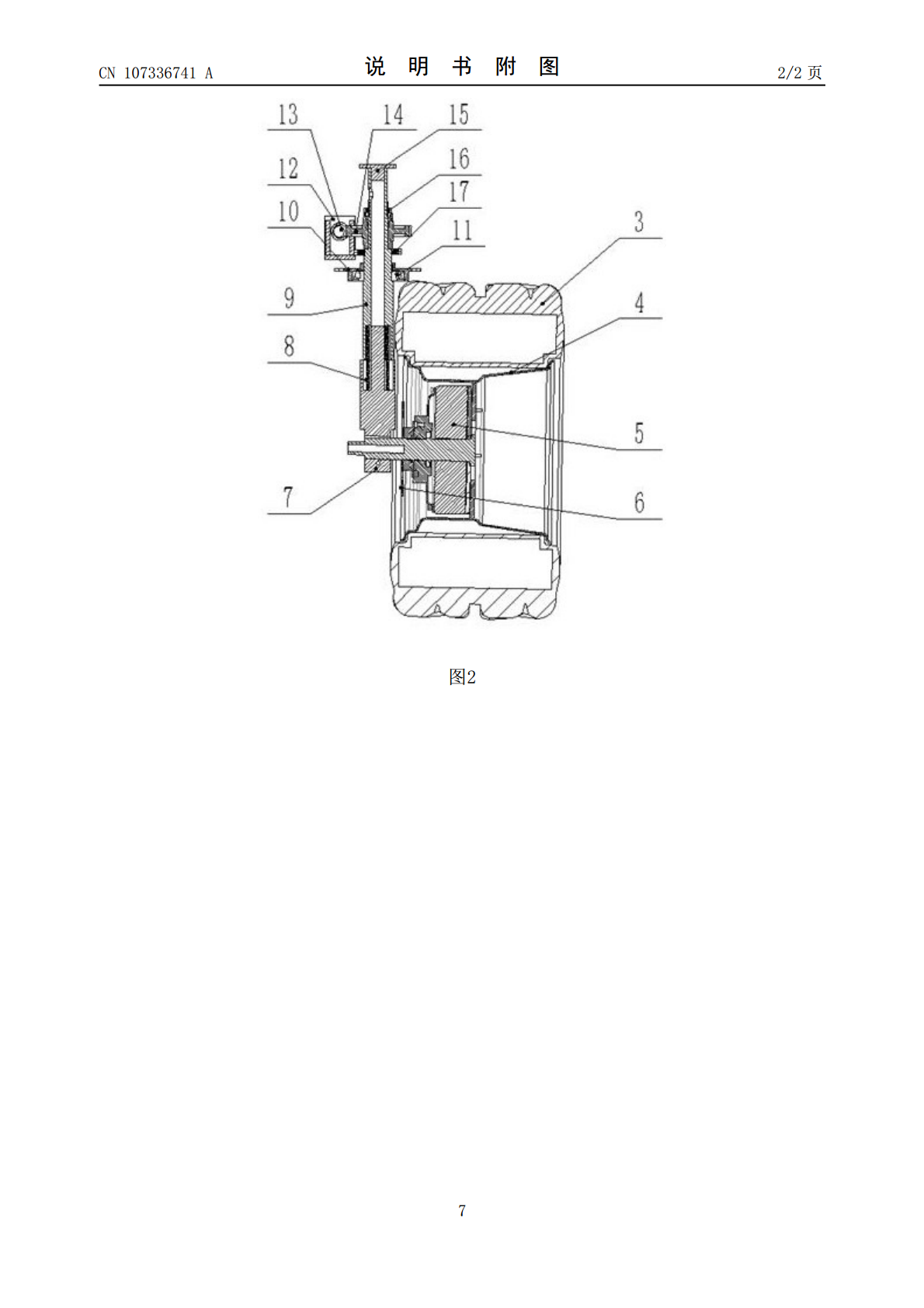
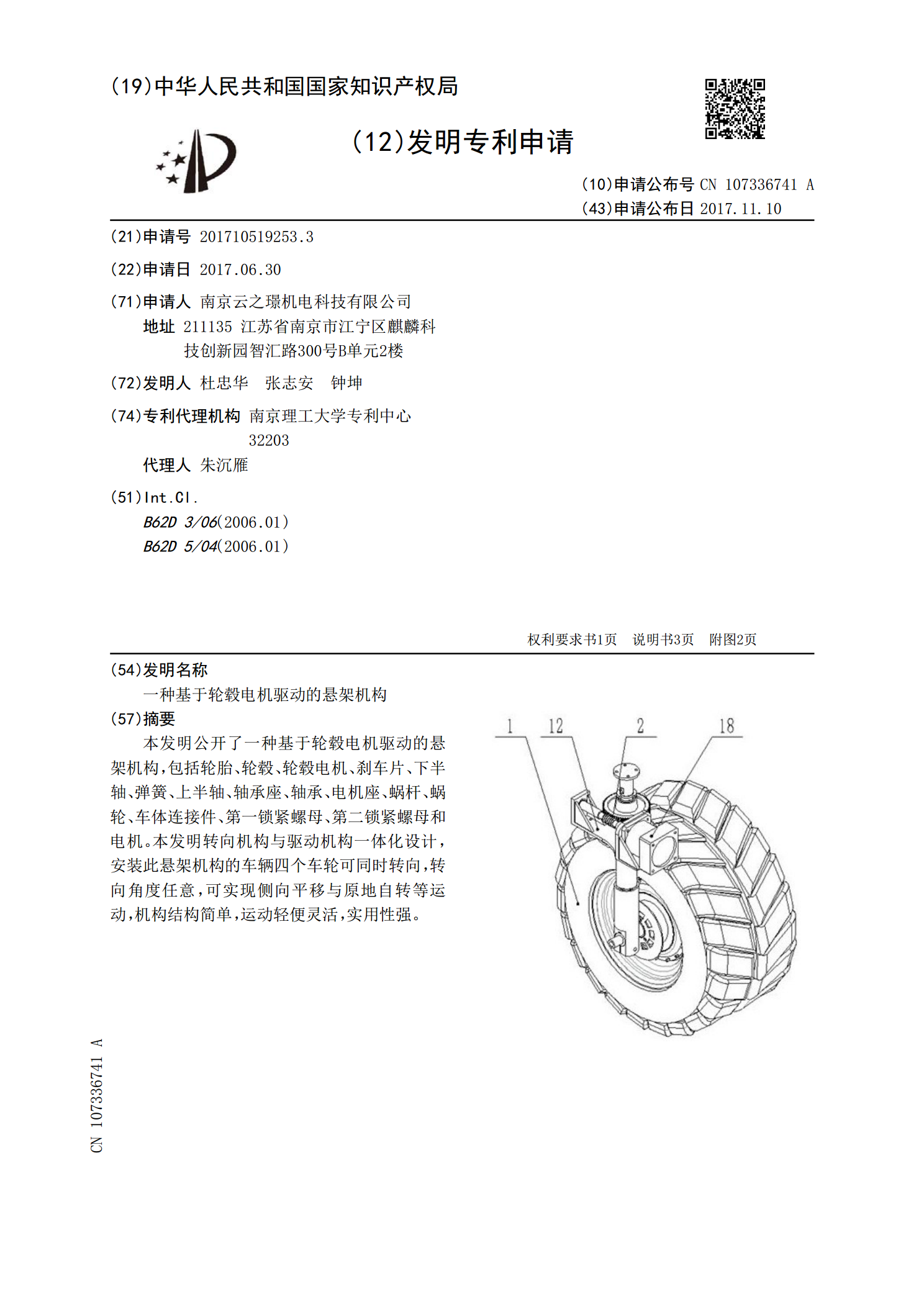
本发明公开了一种基于轮毂电机驱动的悬架机构,包括轮胎、轮毂、轮毂电机、刹车片、下半轴、弹簧、上半轴、轴承座、轴承、电机座、蜗杆、蜗轮、车体连接件、第一锁紧螺母、第二锁紧螺母和电机。本发明转向机构与驱动机构一体化设计,安装此悬架机构的车辆四个车轮可同时转向,转向角度任意,可实现侧向平移与原地自转等运动,机构结构简单,运动轻便灵活,实用性强。
一种轮毂电机驱动车辆前后通用的多连杆悬架机构.pdf
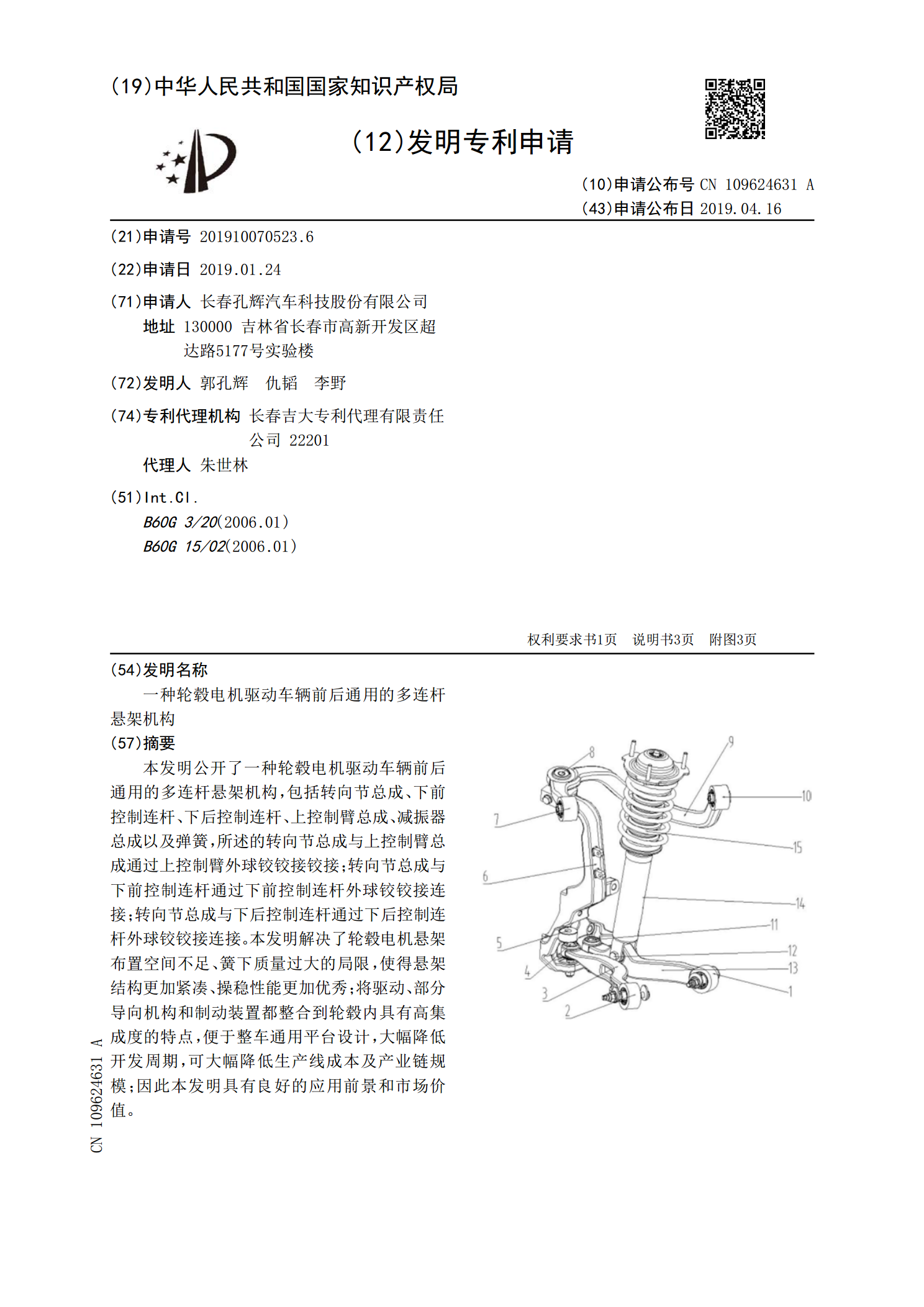
本发明公开了一种轮毂电机驱动车辆前后通用的多连杆悬架机构,包括转向节总成、下前控制连杆、下后控制连杆、上控制臂总成、减振器总成以及弹簧,所述的转向节总成与上控制臂总成通过上控制臂外球铰铰接铰接;转向节总成与下前控制连杆通过下前控制连杆外球铰铰接连接;转向节总成与下后控制连杆通过下后控制连杆外球铰铰接连接。本发明解决了轮毂电机悬架布置空间不足、簧下质量过大的局限,使得悬架结构更加紧凑、操稳性能更加优秀;将驱动、部分导向机构和制动装置都整合到轮毂内具有高集成度的特点,便于整车通用平台设计,大幅降低开发周期,可
一种适合轮毂电机驱动的悬架强度检测装置.pdf
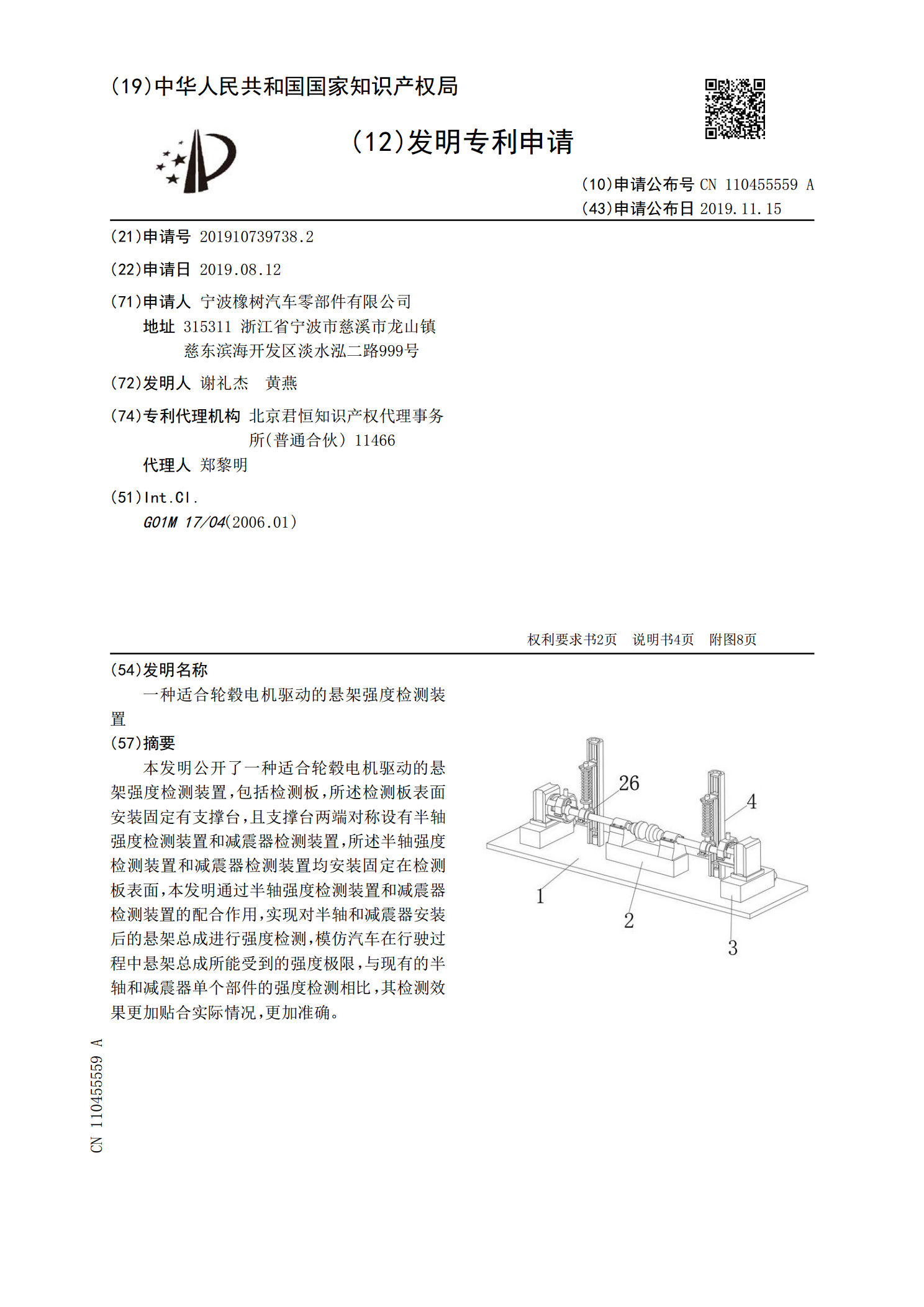
本发明公开了一种适合轮毂电机驱动的悬架强度检测装置,包括检测板,所述检测板表面安装固定有支撑台,且支撑台两端对称设有半轴强度检测装置和减震器检测装置,所述半轴强度检测装置和减震器检测装置均安装固定在检测板表面,本发明通过半轴强度检测装置和减震器检测装置的配合作用,实现对半轴和减震器安装后的悬架总成进行强度检测,模仿汽车在行驶过程中悬架总成所能受到的强度极限,与现有的半轴和减震器单个部件的强度检测相比,其检测效果更加贴合实际情况,更加准确。
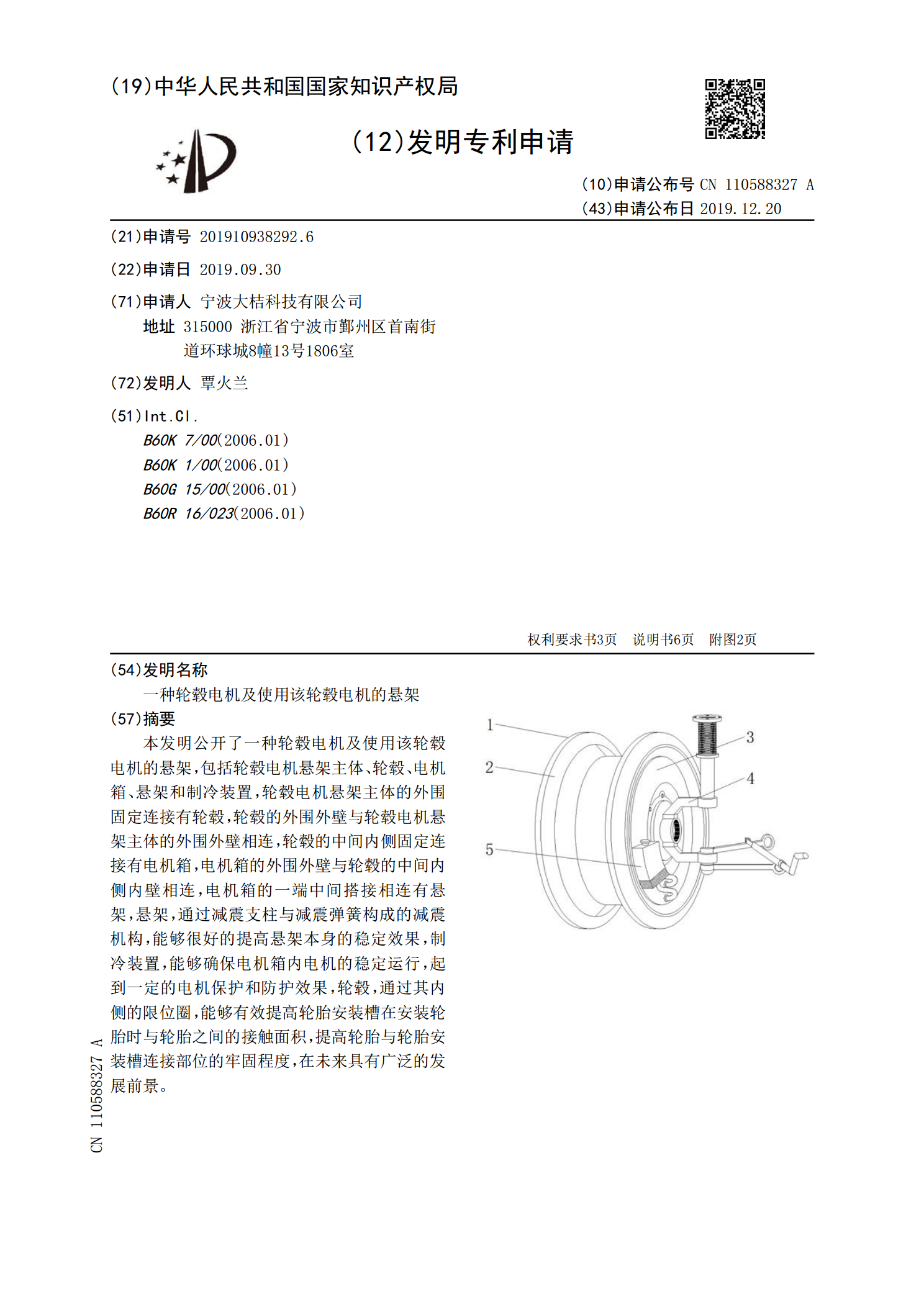
一种轮毂电机及使用该轮毂电机的悬架.pdf
本发明公开了一种轮毂电机及使用该轮毂电机的悬架,包括轮毂电机悬架主体、轮毂、电机箱、悬架和制冷装置,轮毂电机悬架主体的外围固定连接有轮毂,轮毂的外围外壁与轮毂电机悬架主体的外围外壁相连,轮毂的中间内侧固定连接有电机箱,电机箱的外围外壁与轮毂的中间内侧内壁相连,电机箱的一端中间搭接相连有悬架,悬架,通过减震支柱与减震弹簧构成的减震机构,能够很好的提高悬架本身的稳定效果,制冷装置,能够确保电机箱内电机的稳定运行,起到一定的电机保护和防护效果,轮毂,通过其内侧的限位圈,能够有效提高轮胎安装槽在安装轮胎时与轮胎之
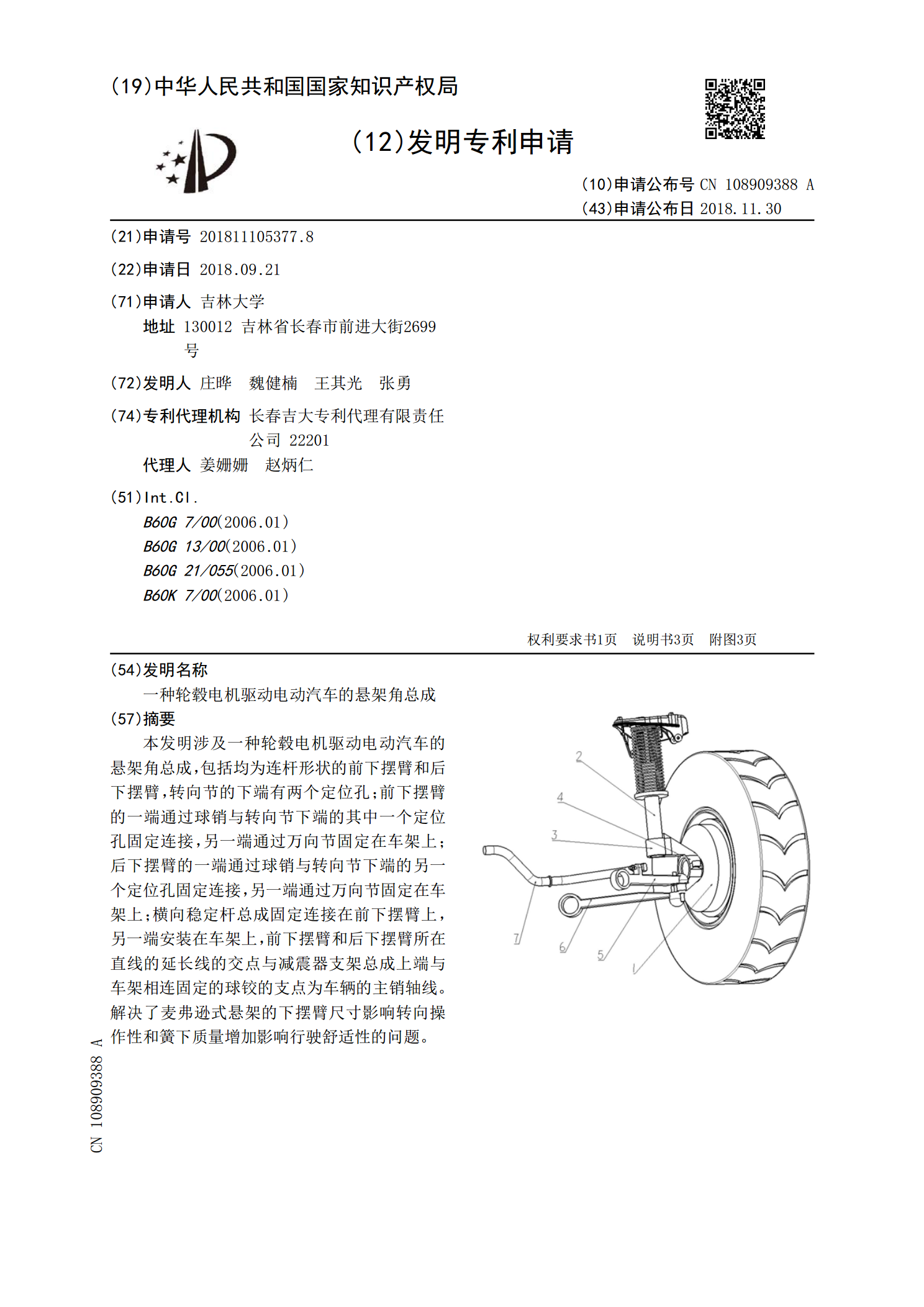
一种轮毂电机驱动电动汽车的悬架角总成.pdf
本发明涉及一种轮毂电机驱动电动汽车的悬架角总成,包括均为连杆形状的前下摆臂和后下摆臂,转向节的下端有两个定位孔;前下摆臂的一端通过球销与转向节下端的其中一个定位孔固定连接,另一端通过万向节固定在车架上;后下摆臂的一端通过球销与转向节下端的另一个定位孔固定连接,另一端通过万向节固定在车架上;横向稳定杆总成固定连接在前下摆臂上,另一端安装在车架上,前下摆臂和后下摆臂所在直线的延长线的交点与减震器支架总成上端与车架相连固定的球铰的支点为车辆的主销轴线。解决了麦弗逊式悬架的下摆臂尺寸影响转向操作性和簧下质量增加影