
一种无人车多源传感器信息仿真平台.pdf

琰琬****买买

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人车多源传感器信息仿真平台.pdf
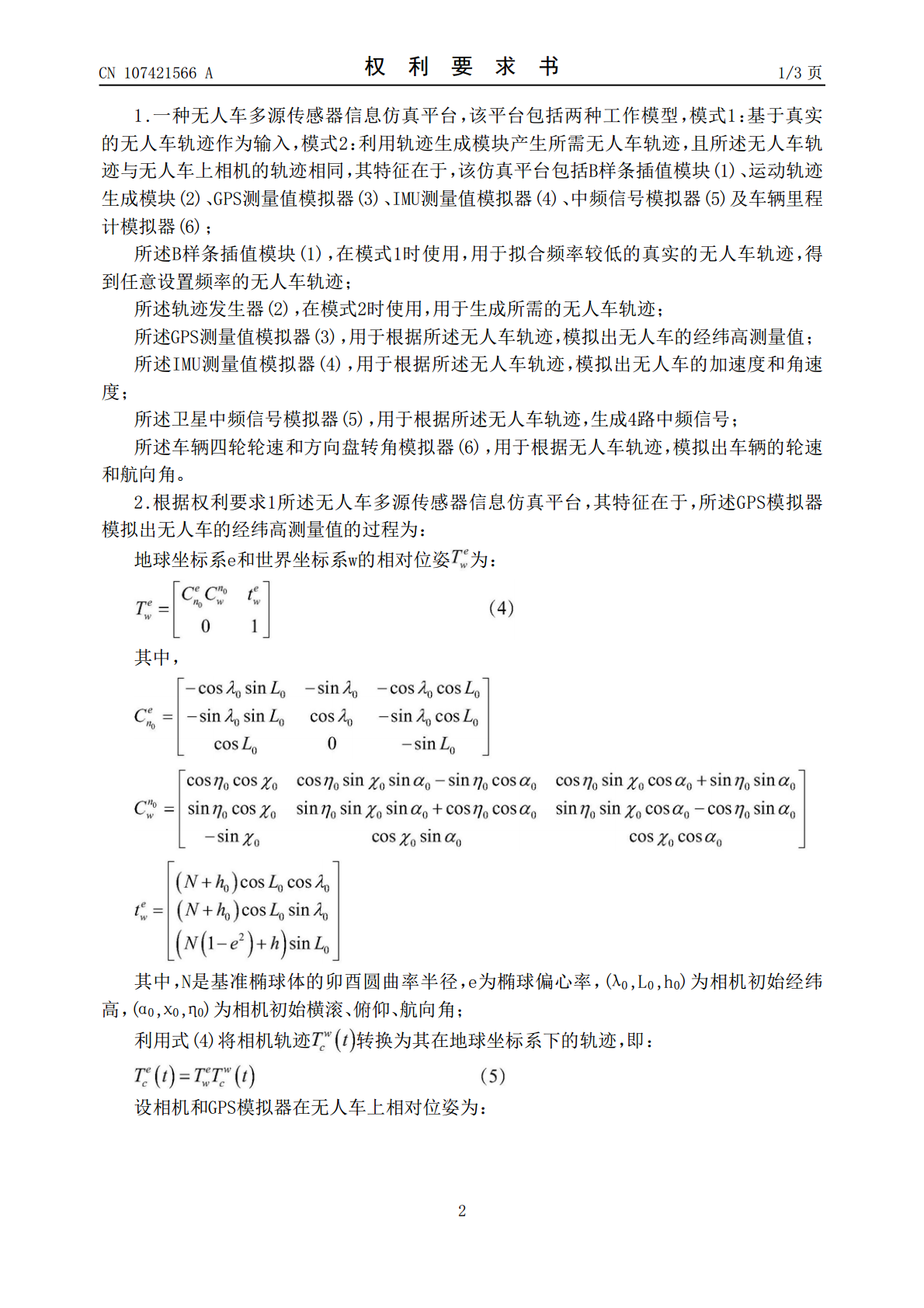
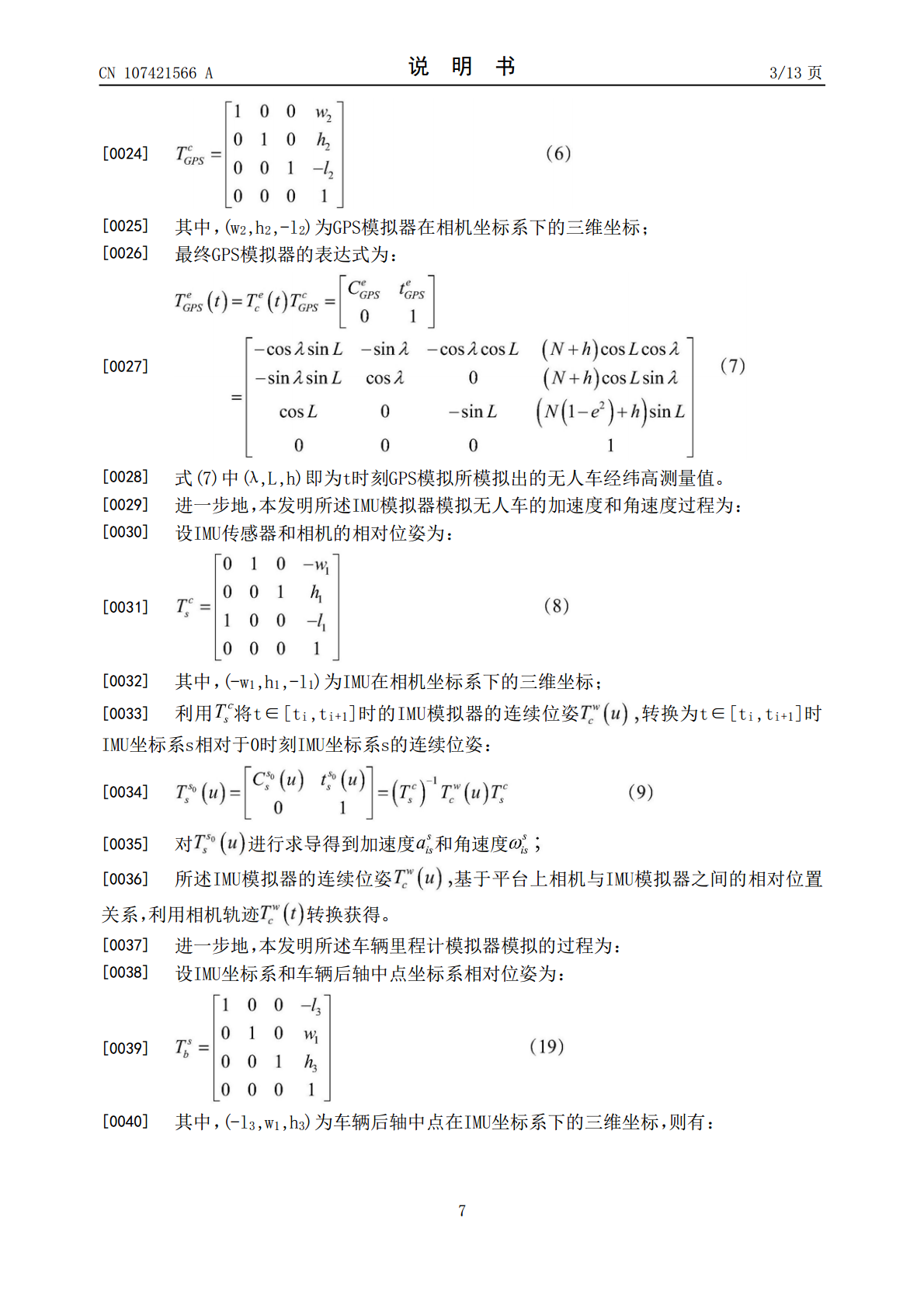
本发明一种无人车多源传感器信息仿真平台,包括B样条插值模块、运动轨迹生成模块、GPS测量值模拟器、IMU测量值模拟器、中频信号模拟器及车辆里程计模拟器;B样条插值模块,用于拟合频率较低的真实的无人车轨迹,得到任意设置频率的无人车轨迹;轨迹发生器,用于生成所需的无人车轨迹;GPS测量值模拟器,用于根据无人车轨迹,模拟出无人车的经纬高测量值;IMU测量值模拟器,用于根据无人车轨迹,模拟出无人车的加速度和角速度;卫星中频信号模拟器,用于根据无人车轨迹,生成4路中频信号;车辆里程计模拟器,用于根据无人车轨迹,模拟

一种融合多源传感器信息的无人车定位方法.pdf
本发明涉及一种融合多源传感器信息的无人车定位方法,该方法包括以下步骤:步骤1:获取待控制车辆的GPS位置信息和IMU信息,并将待控制车辆结合惯性导航系统与GPS信号获得的厘米级精度定位作为真值;步骤2:建立线性模型;步骤3:获取线性模型下的融合多源传感器信息的无人车定位算法,并得到线性模型下的融合定位结果;步骤4:建立非线性模型;步骤5:获取运动学模型下的融合多源传感器信息的无人车定位算法,并得到非线性模型下的融合定位结果;步骤6:建立单车模型;步骤7:获取单车模型下的融合多源传感器信息的无人车定位算法,
一种融合多源传感器信息的无人车定位方法.pdf
本发明涉及一种融合多源传感器信息的无人车定位方法,该方法包括以下步骤:步骤1:获取待控制车辆的GPS位置信息和IMU信息,并将待控制车辆结合惯性导航系统与GPS信号获得的厘米级精度定位作为真值;步骤2:建立线性模型;步骤3:获取线性模型下的融合多源传感器信息的无人车定位算法,并得到线性模型下的融合定位结果;步骤4:建立非线性模型;步骤5:获取运动学模型下的融合多源传感器信息的无人车定位算法,并得到非线性模型下的融合定位结果;步骤6:建立单车模型;步骤7:获取单车模型下的融合多源传感器信息的无人车定位算法,
一种具有多传感器布局的无人车.pdf
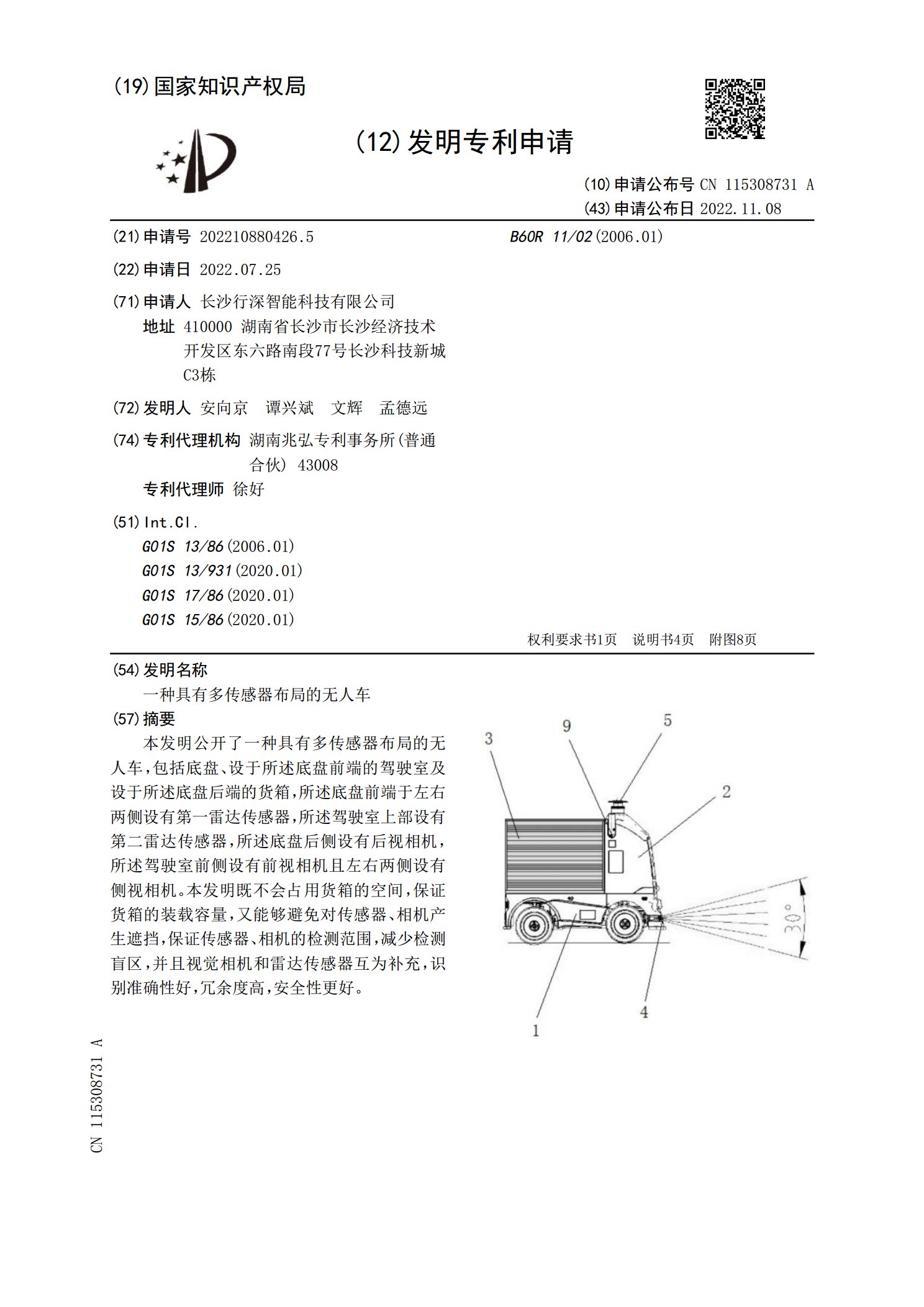
本发明公开了一种具有多传感器布局的无人车,包括底盘、设于所述底盘前端的驾驶室及设于所述底盘后端的货箱,所述底盘前端于左右两侧设有第一雷达传感器,所述驾驶室上部设有第二雷达传感器,所述底盘后侧设有后视相机,所述驾驶室前侧设有前视相机且左右两侧设有侧视相机。本发明既不会占用货箱的空间,保证货箱的装载容量,又能够避免对传感器、相机产生遮挡,保证传感器、相机的检测范围,减少检测盲区,并且视觉相机和雷达传感器互为补充,识别准确性好,冗余度高,安全性更好。

多传感器信息融合的无人车导航系统设计研究.docx
多传感器信息融合的无人车导航系统设计研究摘要:随着人类社会的不断进步和科技的不断发展,无人车已经成为了人们关注的焦点。作为一种全新的交通工具,无人车的导航系统是其最核心的技术之一。多传感器信息融合被广泛应用于无人车导航系统中,可以提高系统的精度和可靠性,提高行驶的安全性。本文对多传感器信息融合的无人车导航系统设计进行了研究,详细介绍了其原理、应用价值和优缺点,并结合实际案例进行分析和探讨。关键词:无人车;导航系统;多传感器信息融合一、引言随着城市化进程的不断加快和人口的不断增加,交通和环境问题已经成为了人