
一种无轨导航AGV自动进出货车方法.pdf

宜然****找我


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种无轨导航AGV自动进出货车方法.pdf
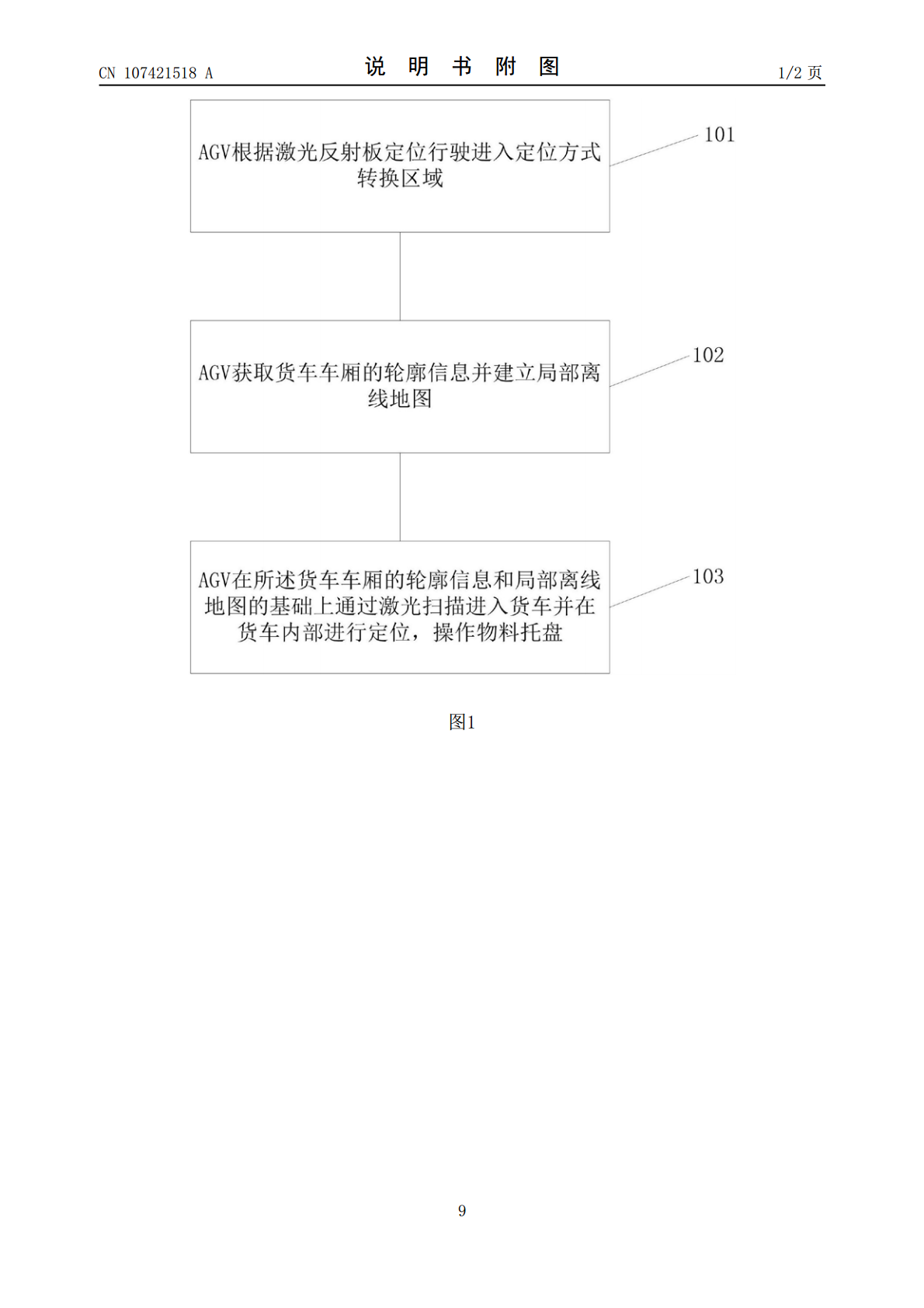
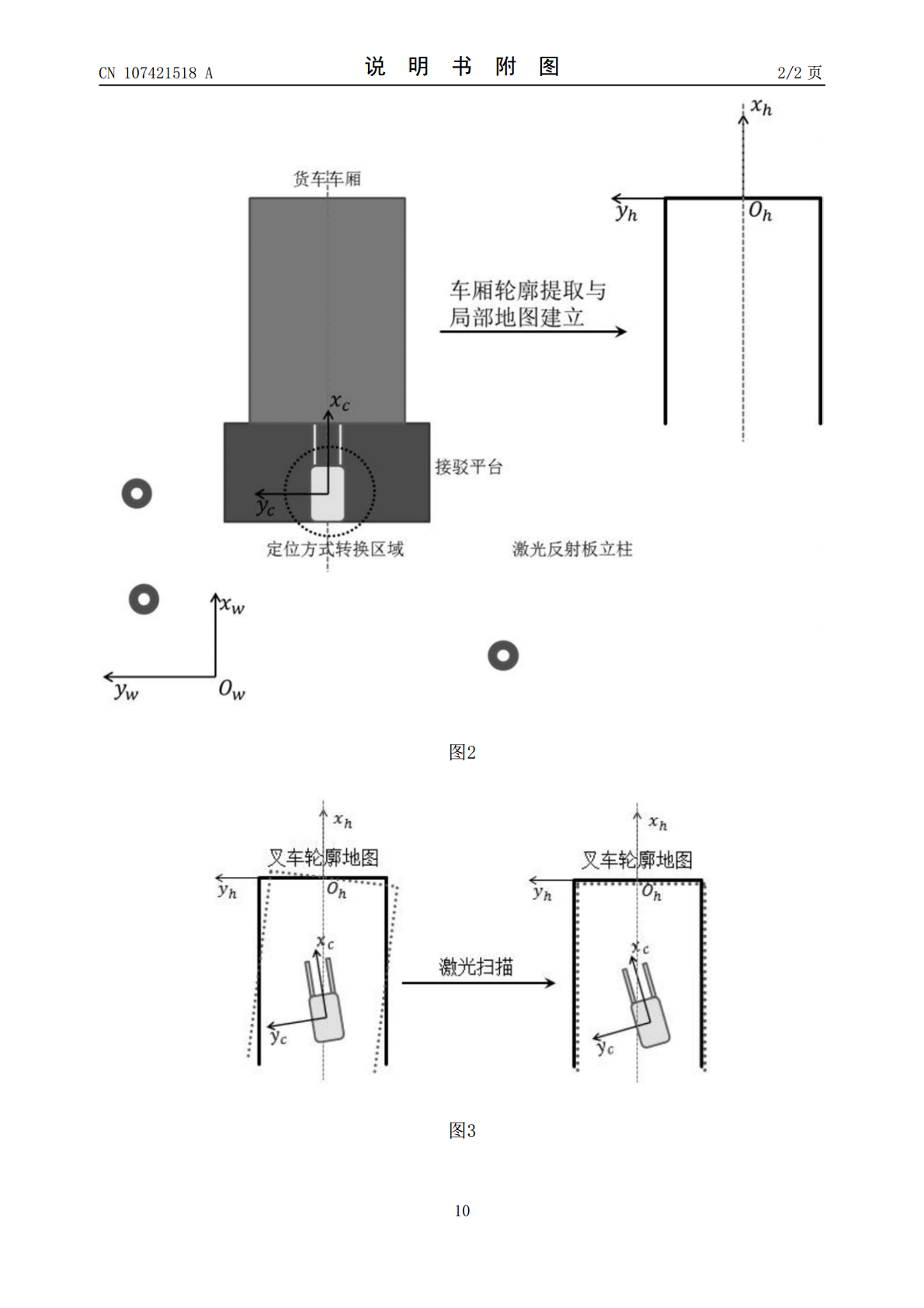
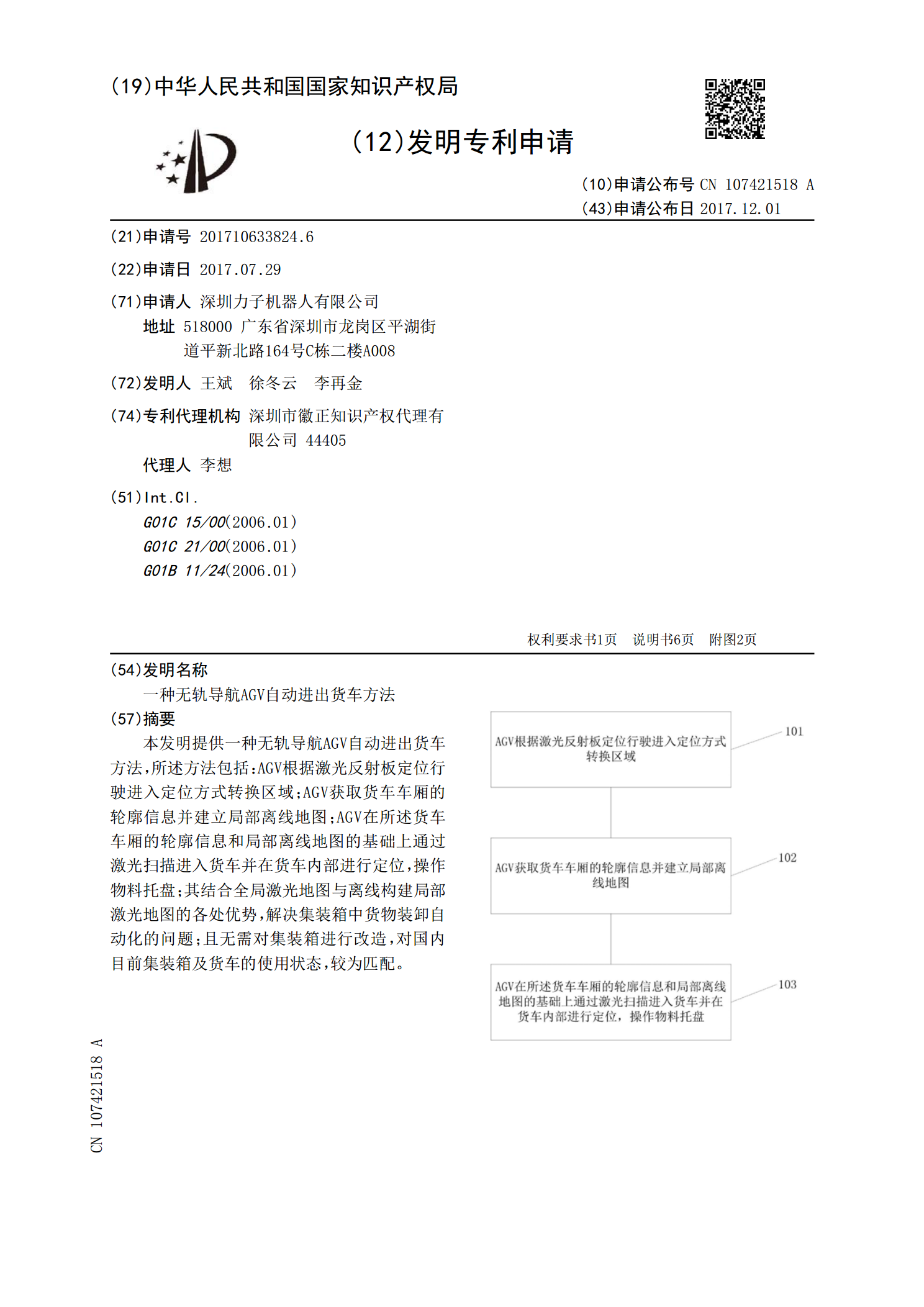
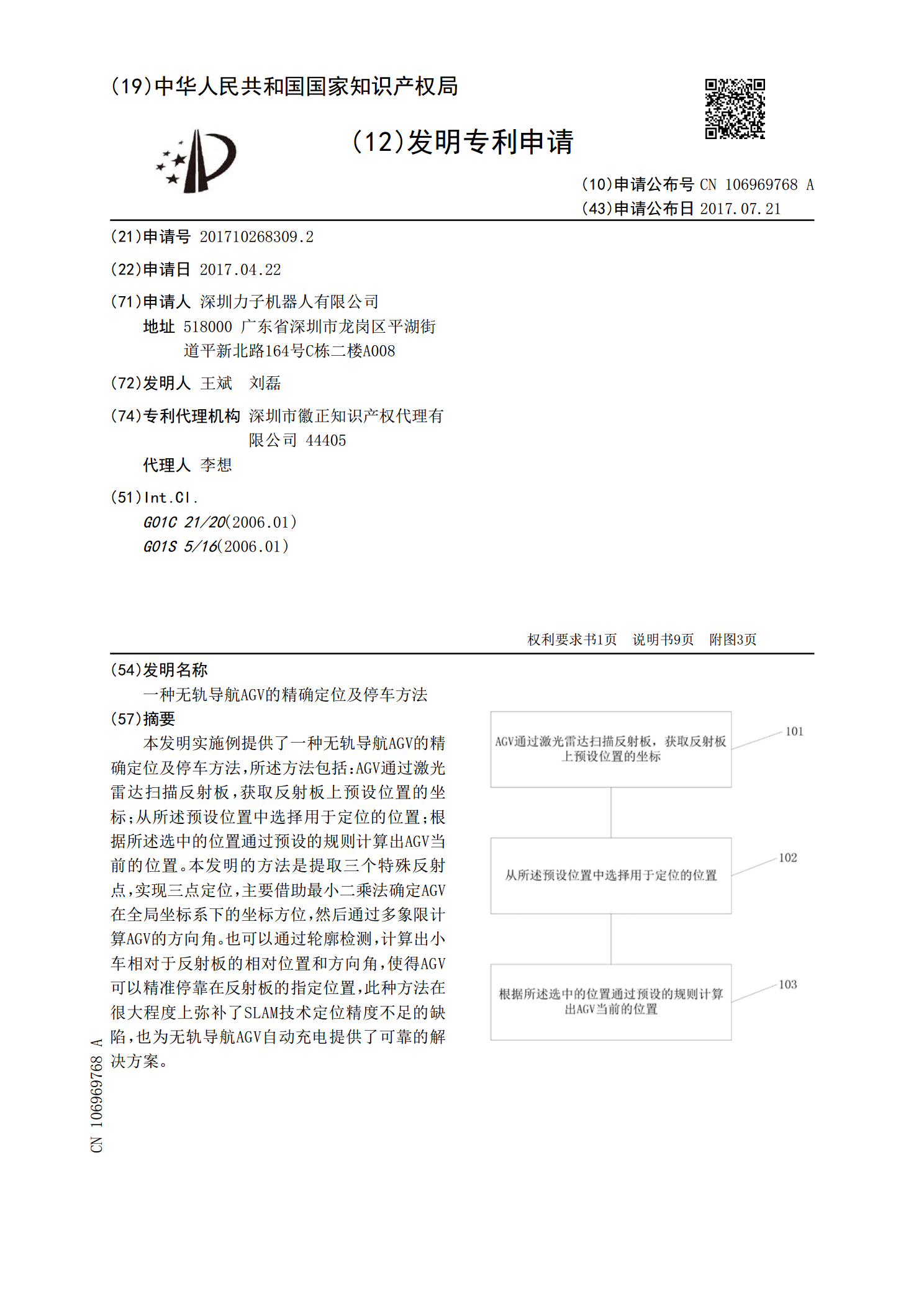
本发明提供一种无轨导航AGV自动进出货车方法,所述方法包括:AGV根据激光反射板定位行驶进入定位方式转换区域;AGV获取货车车厢的轮廓信息并建立局部离线地图;AGV在所述货车车厢的轮廓信息和局部离线地图的基础上通过激光扫描进入货车并在货车内部进行定位,操作物料托盘;其结合全局激光地图与离线构建局部激光地图的各处优势,解决集装箱中货物装卸自动化的问题;且无需对集装箱进行改造,对国内目前集装箱及货车的使用状态,较为匹配。
一种无轨导航AGV的精确定位及停车方法.pdf
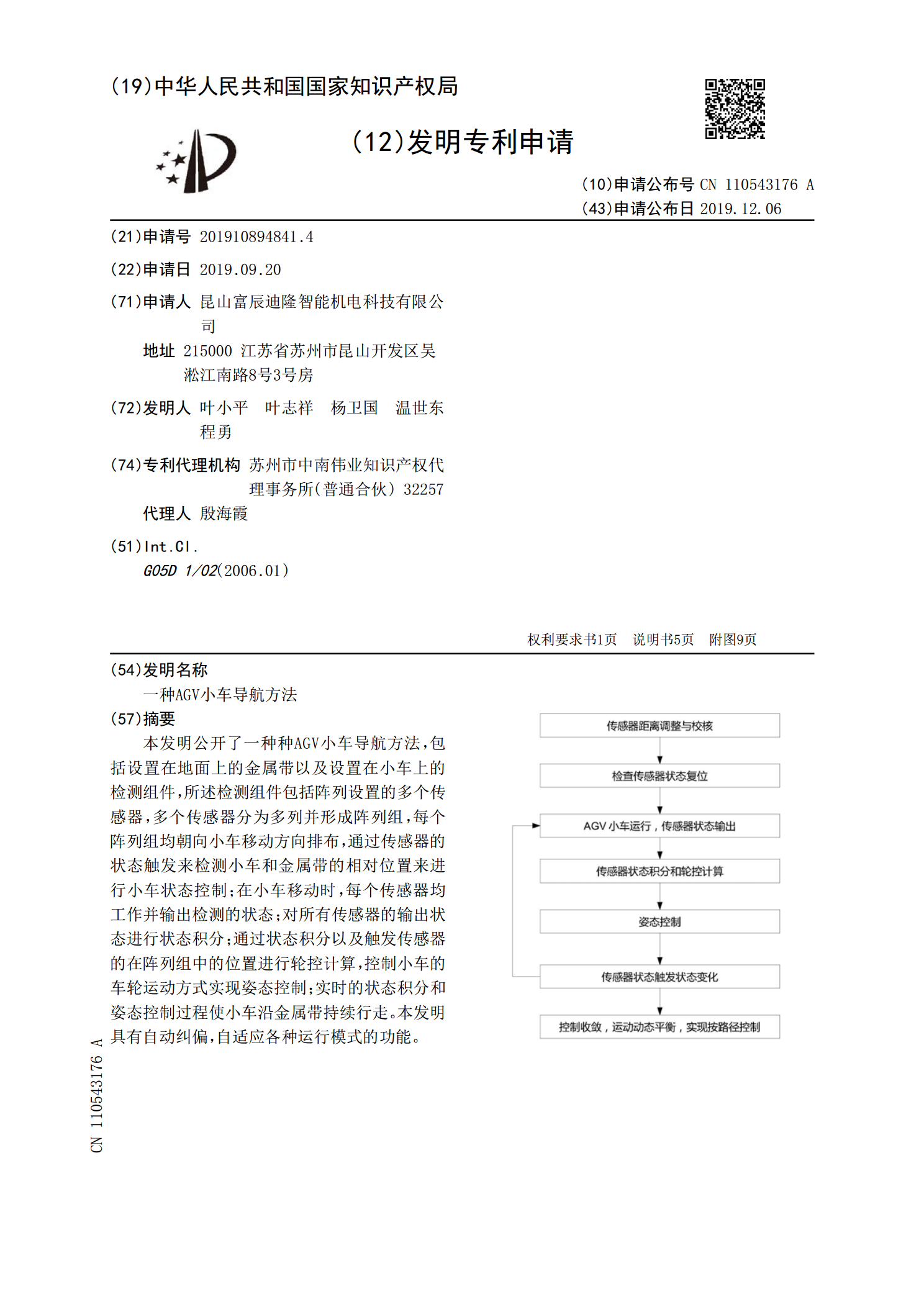
本发明实施例提供了一种无轨导航AGV的精确定位及停车方法,所述方法包括:AGV通过激光雷达扫描反射板,获取反射板上预设位置的坐标;从所述预设位置中选择用于定位的位置;根据所述选中的位置通过预设的规则计算出AGV当前的位置。本发明的方法是提取三个特殊反射点,实现三点定位,主要借助最小二乘法确定AGV在全局坐标系下的坐标方位,然后通过多象限计算AGV的方向角。也可以通过轮廓检测,计算出小车相对于反射板的相对位置和方向角,使得AGV可以精准停靠在反射板的指定位置,此种方法在很大程度上弥补了SLAM技术定位精度不

用于无轨导航AGV的视觉定位方法以及装置和系统.pdf
本发明涉及用于无轨导航AGV的视觉定位方法以及装置和系统,该方法包括获取图像数据;对图像数据进行实时自适应二值化处理,获取二值化图像;矫正或扫描二值化图像,检测二值化图像内的轮廓,存储轮廓;剔除存储的轮廓中不符合要求的轮廓;提取符合要求的轮廓的特征以及质心;获取具体的位置信息。本发明通过图像传感器获取图像信息,提取标签信息,并输出给AGV相应的坐标、角度、标签信息,AGV通过提供的信息进行定位,在求平均阈值时采用全局求均值的方法,二值化后图像轮廓比较少,加快后期处理轮廓的速度,通过逻辑方式处理二维码的解码

一种自动导航AGV运输小车.pdf
本发明公开了一种自动导航AGV运输小车,包括AGV小车和RFID标签;所述的AGV小车主要由控制器、RFID读写器、前轮、前轮驱动装置、充电电池、后轮驱动装置、后轮、车架、减震弹簧、货物板、货物后挡板、货物侧挡板组成;所述的AGV小车行走的道路上铺有RFID标签;所述的RFID读写器可以阅读铺设在仓库道路上的RFID标签,并将阅读的RFID标签的数据传送给控制器,控制器通过接收的RFID标签的数据信息计算出AGV小车的位置;所述的控制器根据系统预设的目的地位置向前轮驱动装置发送指令,驱动前轮转动改变AGV
一种AGV小车导航方法.pdf
本发明公开了一种种AGV小车导航方法,包括设置在地面上的金属带以及设置在小车上的检测组件,所述检测组件包括阵列设置的多个传感器,多个传感器分为多列并形成阵列组,每个阵列组均朝向小车移动方向排布,通过传感器的状态触发来检测小车和金属带的相对位置来进行小车状态控制;在小车移动时,每个传感器均工作并输出检测的状态;对所有传感器的输出状态进行状态积分;通过状态积分以及触发传感器的在阵列组中的位置进行轮控计算,控制小车的车轮运动方式实现姿态控制;实时的状态积分和姿态控制过程使小车沿金属带持续行走。本发明具有自动纠偏