
用于无轨导航AGV的视觉定位方法以及装置和系统.pdf

慧娇****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于无轨导航AGV的视觉定位方法以及装置和系统.pdf
本发明涉及用于无轨导航AGV的视觉定位方法以及装置和系统,该方法包括获取图像数据;对图像数据进行实时自适应二值化处理,获取二值化图像;矫正或扫描二值化图像,检测二值化图像内的轮廓,存储轮廓;剔除存储的轮廓中不符合要求的轮廓;提取符合要求的轮廓的特征以及质心;获取具体的位置信息。本发明通过图像传感器获取图像信息,提取标签信息,并输出给AGV相应的坐标、角度、标签信息,AGV通过提供的信息进行定位,在求平均阈值时采用全局求均值的方法,二值化后图像轮廓比较少,加快后期处理轮廓的速度,通过逻辑方式处理二维码的解码
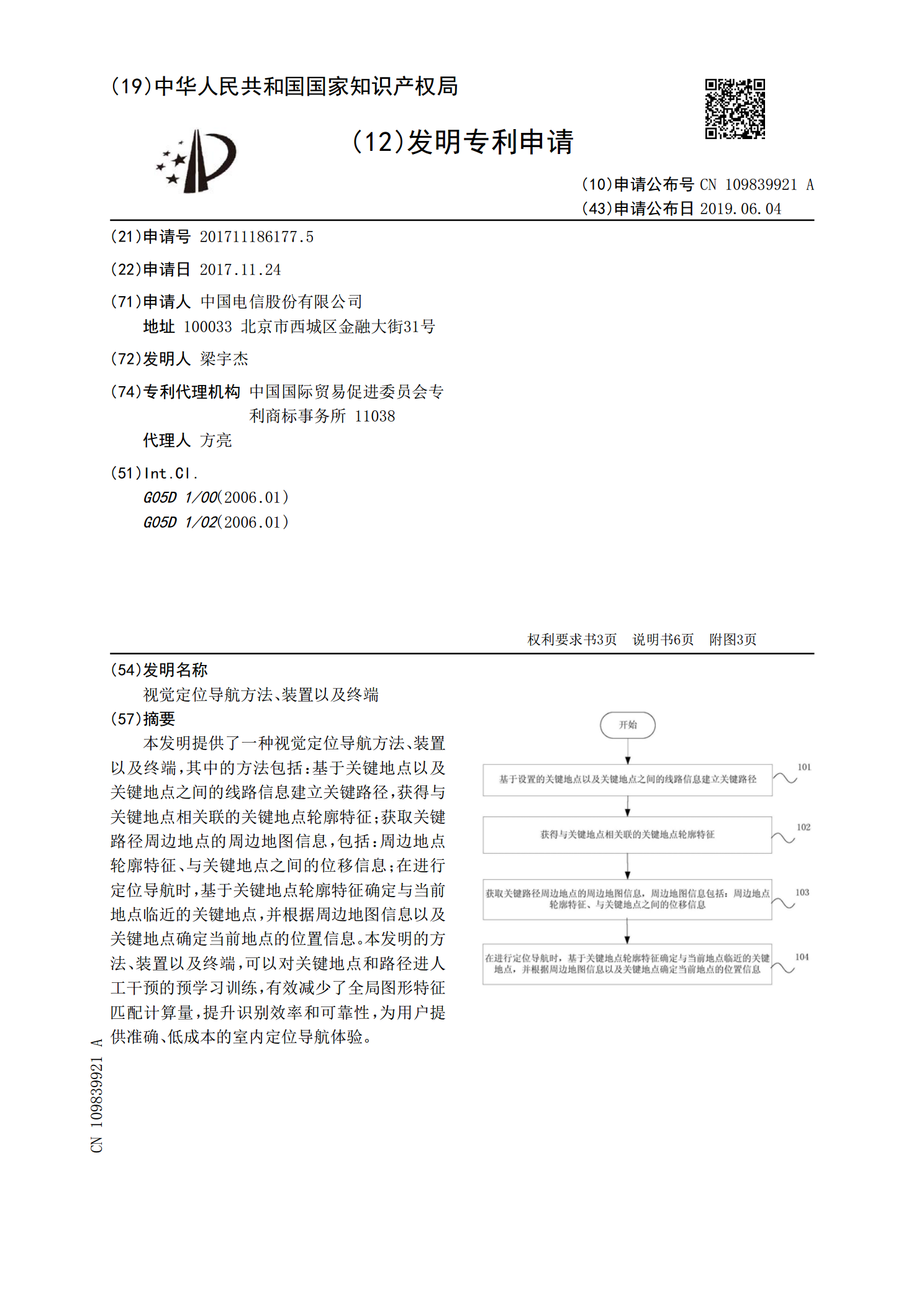
视觉定位导航方法、装置以及终端.pdf
本发明提供了一种视觉定位导航方法、装置以及终端,其中的方法包括:基于关键地点以及关键地点之间的线路信息建立关键路径,获得与关键地点相关联的关键地点轮廓特征;获取关键路径周边地点的周边地图信息,包括:周边地点轮廓特征、与关键地点之间的位移信息;在进行定位导航时,基于关键地点轮廓特征确定与当前地点临近的关键地点,并根据周边地图信息以及关键地点确定当前地点的位置信息。本发明的方法、装置以及终端,可以对关键地点和路径进人工干预的预学习训练,有效减少了全局图形特征匹配计算量,提升识别效率和可靠性,为用户提供准确、低
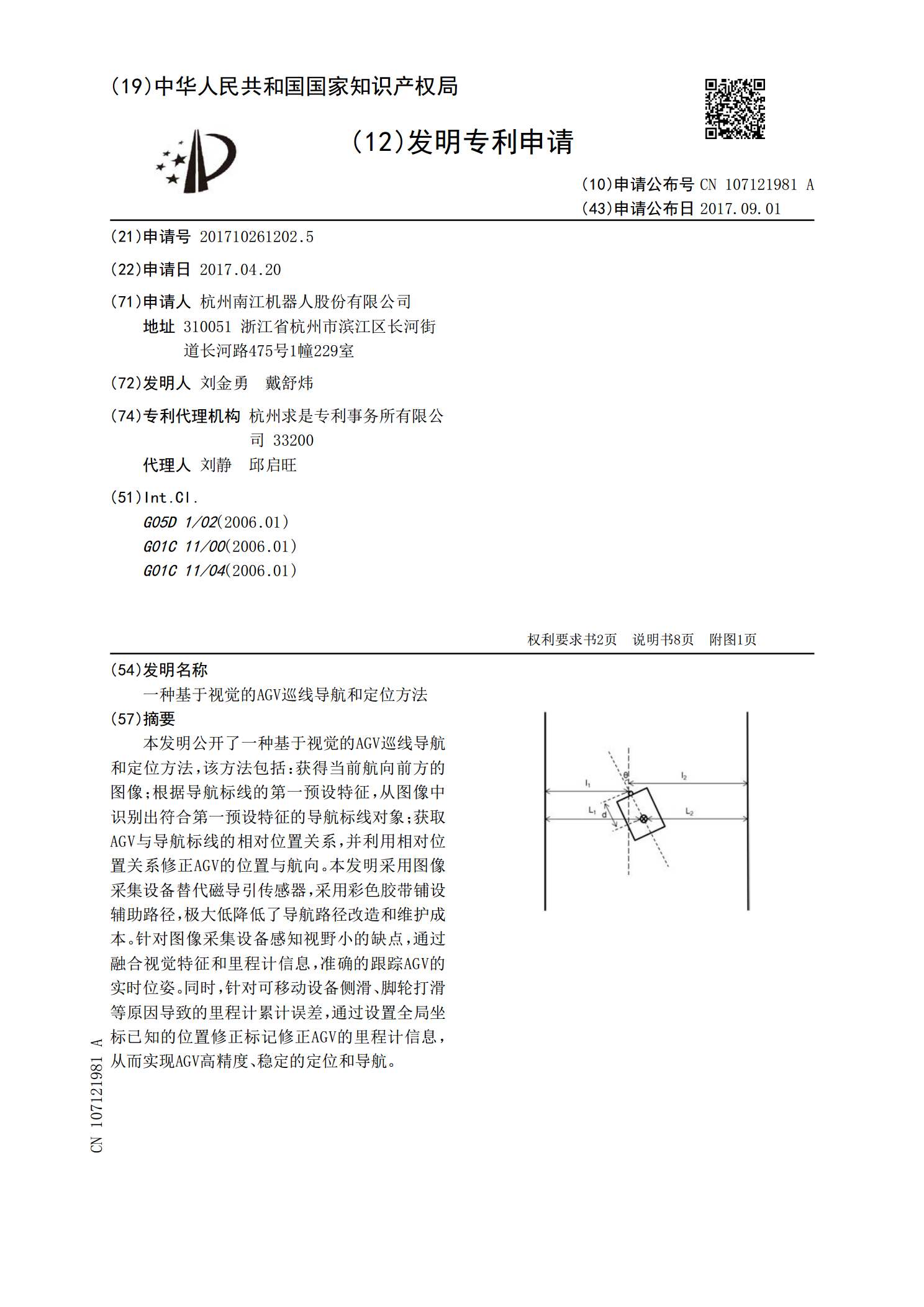
一种基于视觉的AGV巡线导航和定位方法.pdf
本发明公开了一种基于视觉的AGV巡线导航和定位方法,该方法包括:获得当前航向前方的图像;根据导航标线的第一预设特征,从图像中识别出符合第一预设特征的导航标线对象;获取AGV与导航标线的相对位置关系,并利用相对位置关系修正AGV的位置与航向。本发明采用图像采集设备替代磁导引传感器,采用彩色胶带铺设辅助路径,极大低降低了导航路径改造和维护成本。针对图像采集设备感知视野小的缺点,通过融合视觉特征和里程计信息,准确的跟踪AGV的实时位姿。同时,针对可移动设备侧滑、脚轮打滑等原因导致的里程计累计误差,通过设置全局坐

车辆定位导航系统和车辆以及车辆定位导航方法.pdf
本发明公开一种车辆定位导航系统和车辆以及车辆定位导航方法,车辆定位导航系统包括:卫星定位天线,用于接收车辆定位信息;卫星定位行驶记录仪,与卫星定位天线连接,用于响应于定位信息请求信号发送车辆定位信息;车载多媒体系统,车载多媒体系统与卫星定位行驶记录仪连接,车载多媒体系统包括导航模块,车载多媒体系统用于发送定位信息请求信号,并获取车辆定位信息,导航模块根据车辆定位信息生成导航信息并显示。本发明实施例的车辆定位导航系统,无需设置与车载多媒体系统直接连接的卫星定位天线,从而节省一根卫星定位天线,降低了成本。
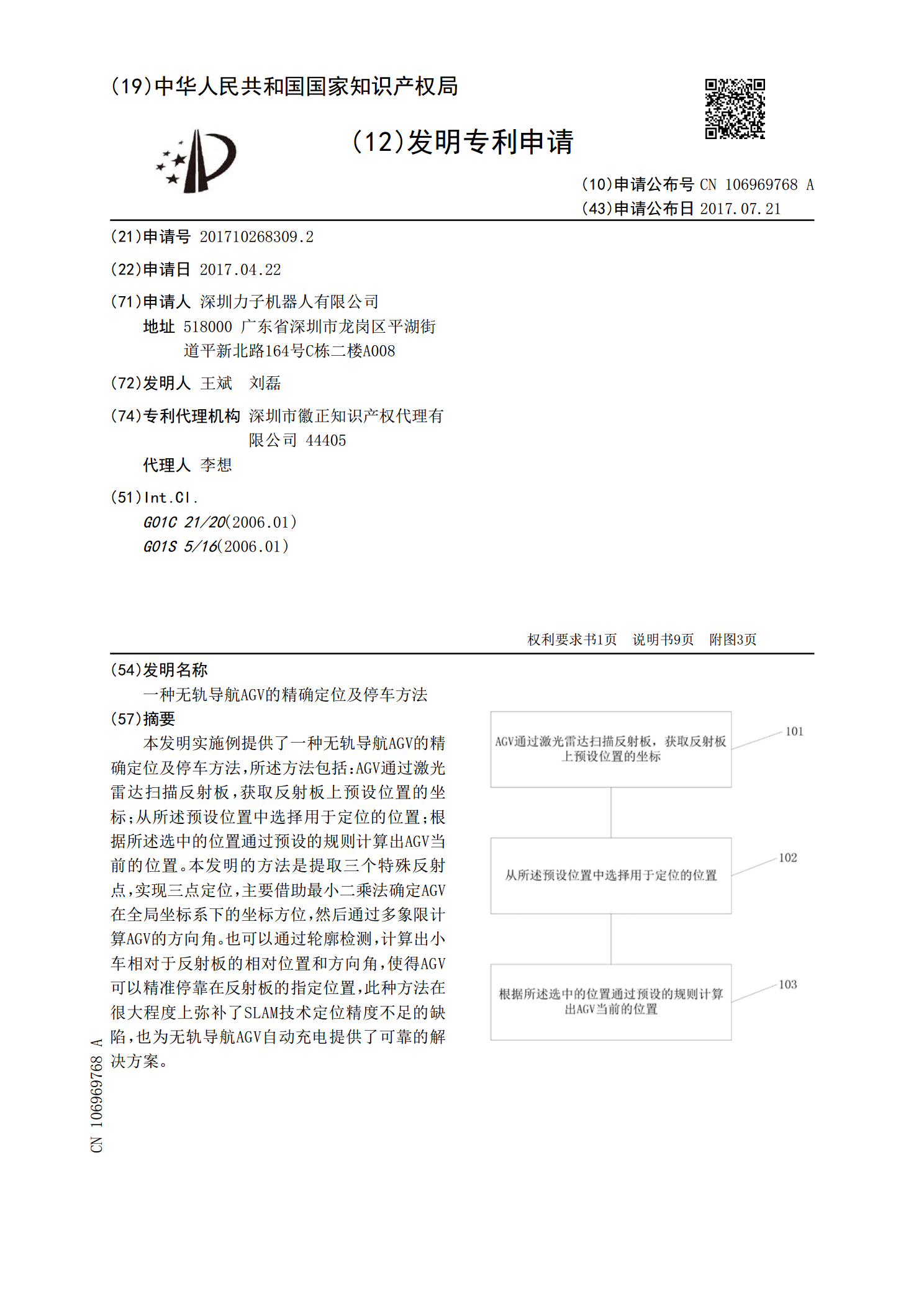
一种无轨导航AGV的精确定位及停车方法.pdf
本发明实施例提供了一种无轨导航AGV的精确定位及停车方法,所述方法包括:AGV通过激光雷达扫描反射板,获取反射板上预设位置的坐标;从所述预设位置中选择用于定位的位置;根据所述选中的位置通过预设的规则计算出AGV当前的位置。本发明的方法是提取三个特殊反射点,实现三点定位,主要借助最小二乘法确定AGV在全局坐标系下的坐标方位,然后通过多象限计算AGV的方向角。也可以通过轮廓检测,计算出小车相对于反射板的相对位置和方向角,使得AGV可以精准停靠在反射板的指定位置,此种方法在很大程度上弥补了SLAM技术定位精度不