
一种具有自动抓取功能的无人搬运车.pdf

梅雪****67

1/8
2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有自动抓取功能的无人搬运车.pdf
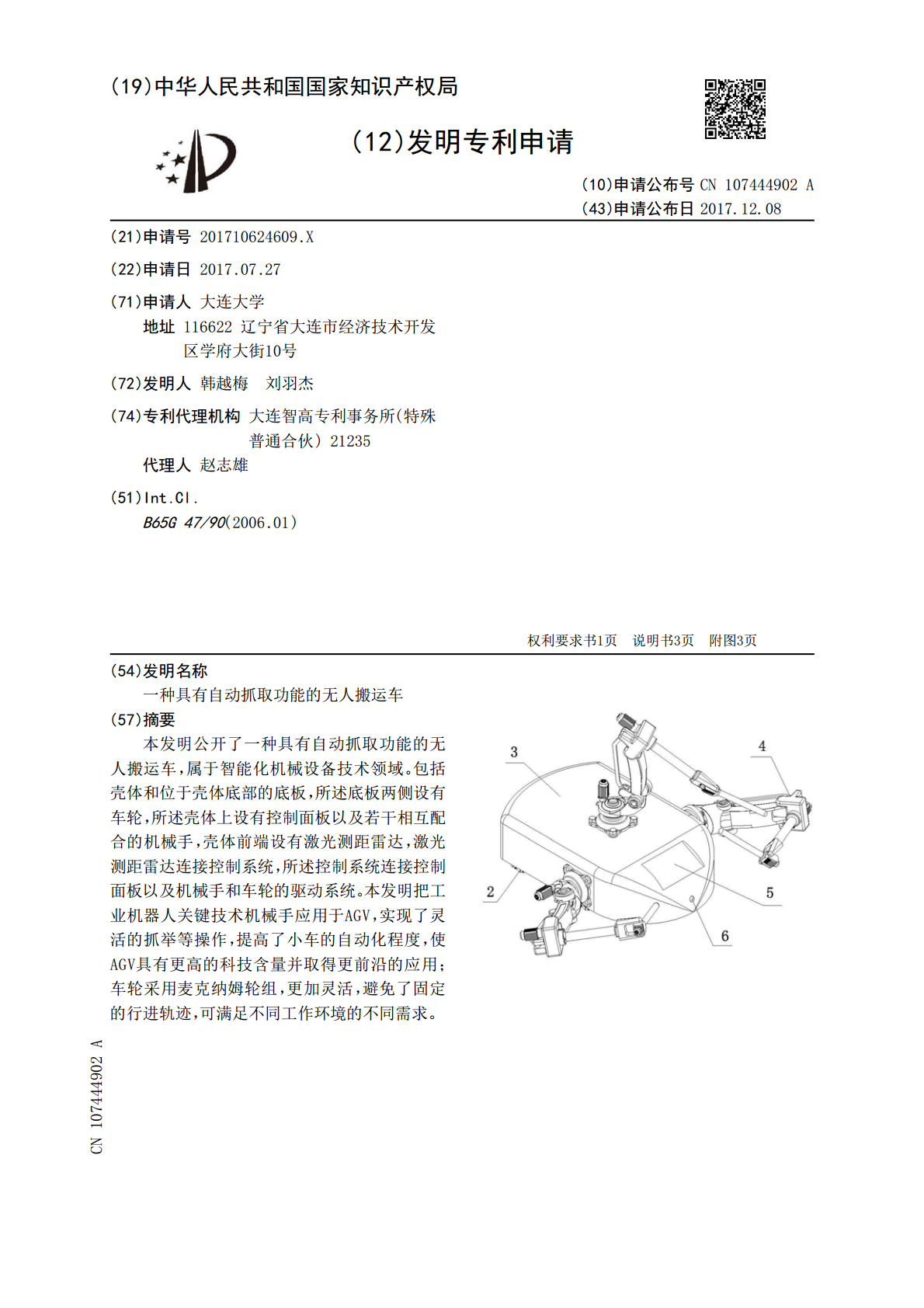
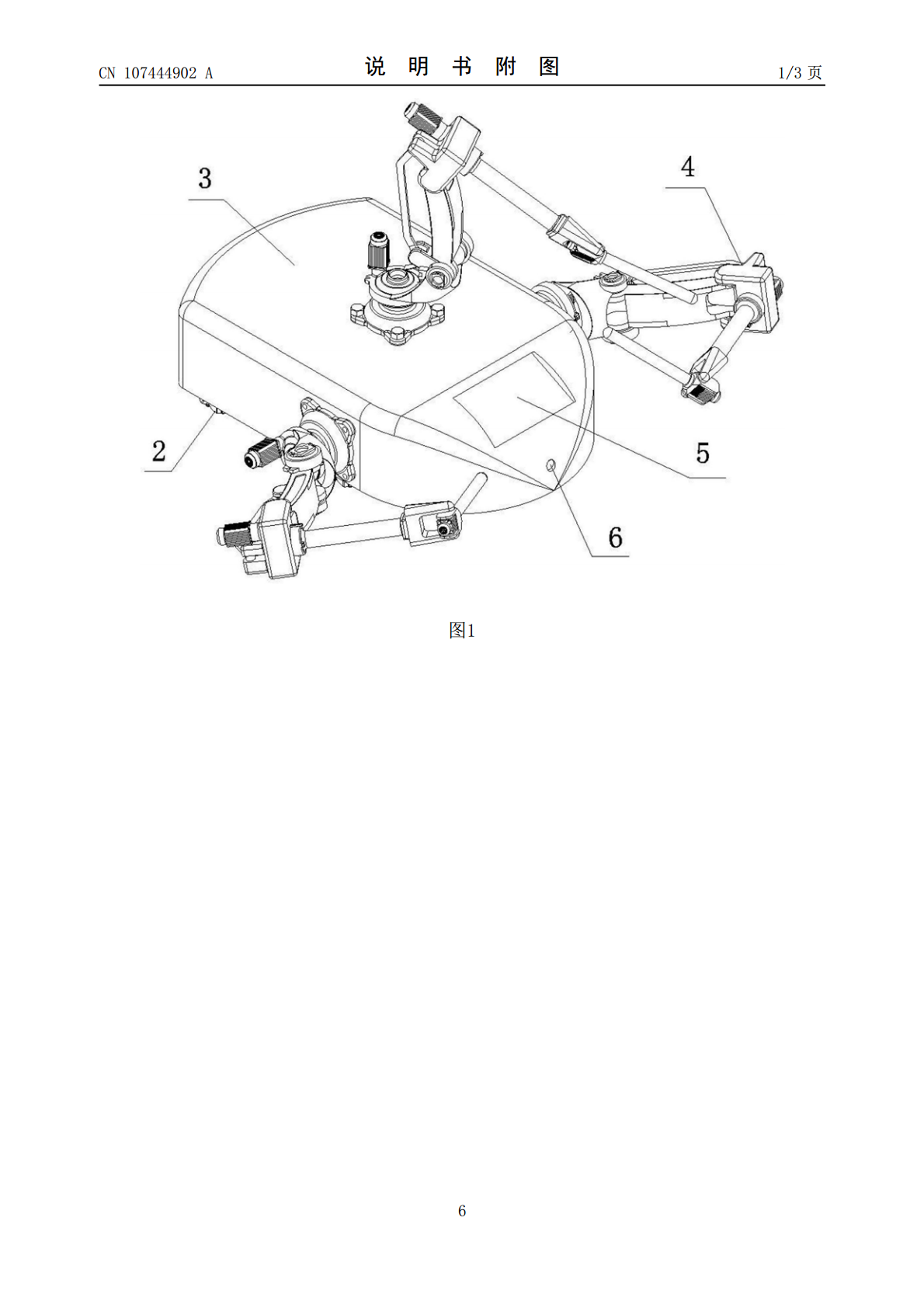
本发明公开了一种具有自动抓取功能的无人搬运车,属于智能化机械设备技术领域。包括壳体和位于壳体底部的底板,所述底板两侧设有车轮,所述壳体上设有控制面板以及若干相互配合的机械手,壳体前端设有激光测距雷达,激光测距雷达连接控制系统,所述控制系统连接控制面板以及机械手和车轮的驱动系统。本发明把工业机器人关键技术机械手应用于AGV,实现了灵活的抓举等操作,提高了小车的自动化程度,使AGV具有更高的科技含量并取得更前沿的应用;车轮采用麦克纳姆轮组,更加灵活,避免了固定的行进轨迹,可满足不同工作环境的不同需求。

一种具有抓取功能的无人机装置.pdf
本发明公开了一种具有抓取功能的无人机装置,包括外框,所述外框的顶部固定连接有顶板,所述顶板的两侧均固定连接有第一电机,所述第一电机输出轴的一端固定连接有机翼,所述外框内壁的顶部固定连接有第二电机,所述第二电机输出轴的一端固定连接有第一锥形齿轮,所述第一锥形齿轮的两侧均啮合有第二锥形齿轮,所述第二锥形齿轮的轴心处固定连接有丝杆,本发明涉及无人机技术领域。该具有抓取功能的无人机装置,便于对物品进行抓取,便于对不同大小的物品进行抓取,提高了装置的适用范围,提高了对物品的固定效果,防止物品的掉落,同时可以对物品进
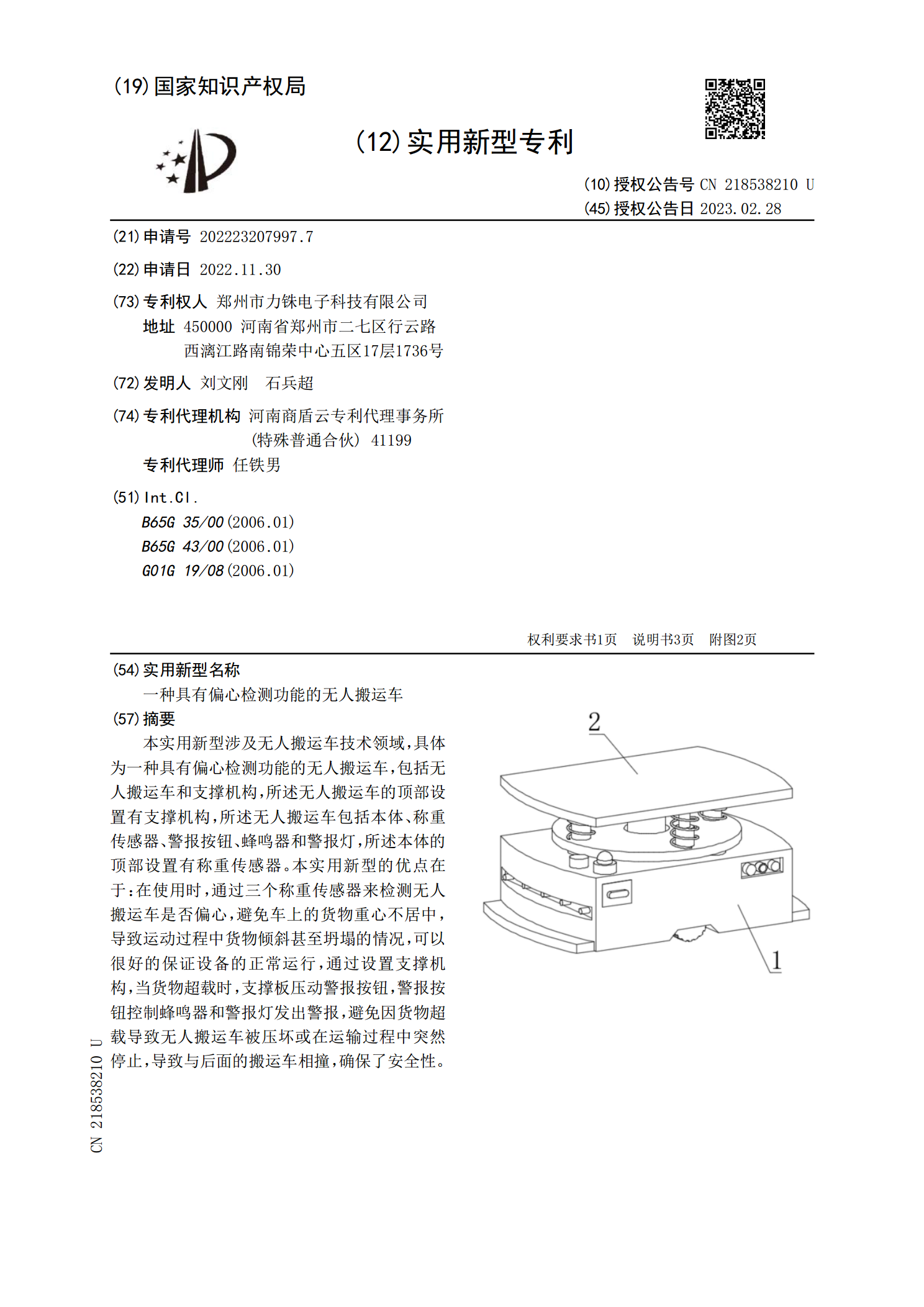
一种具有偏心检测功能的无人搬运车.pdf
本实用新型涉及无人搬运车技术领域,具体为一种具有偏心检测功能的无人搬运车,包括无人搬运车和支撑机构,所述无人搬运车的顶部设置有支撑机构,所述无人搬运车包括本体、称重传感器、警报按钮、蜂鸣器和警报灯,所述本体的顶部设置有称重传感器。本实用新型的优点在于:在使用时,通过三个称重传感器来检测无人搬运车是否偏心,避免车上的货物重心不居中,导致运动过程中货物倾斜甚至坍塌的情况,可以很好的保证设备的正常运行,通过设置支撑机构,当货物超载时,支撑板压动警报按钮,警报按钮控制蜂鸣器和警报灯发出警报,避免因货物超载导致无人
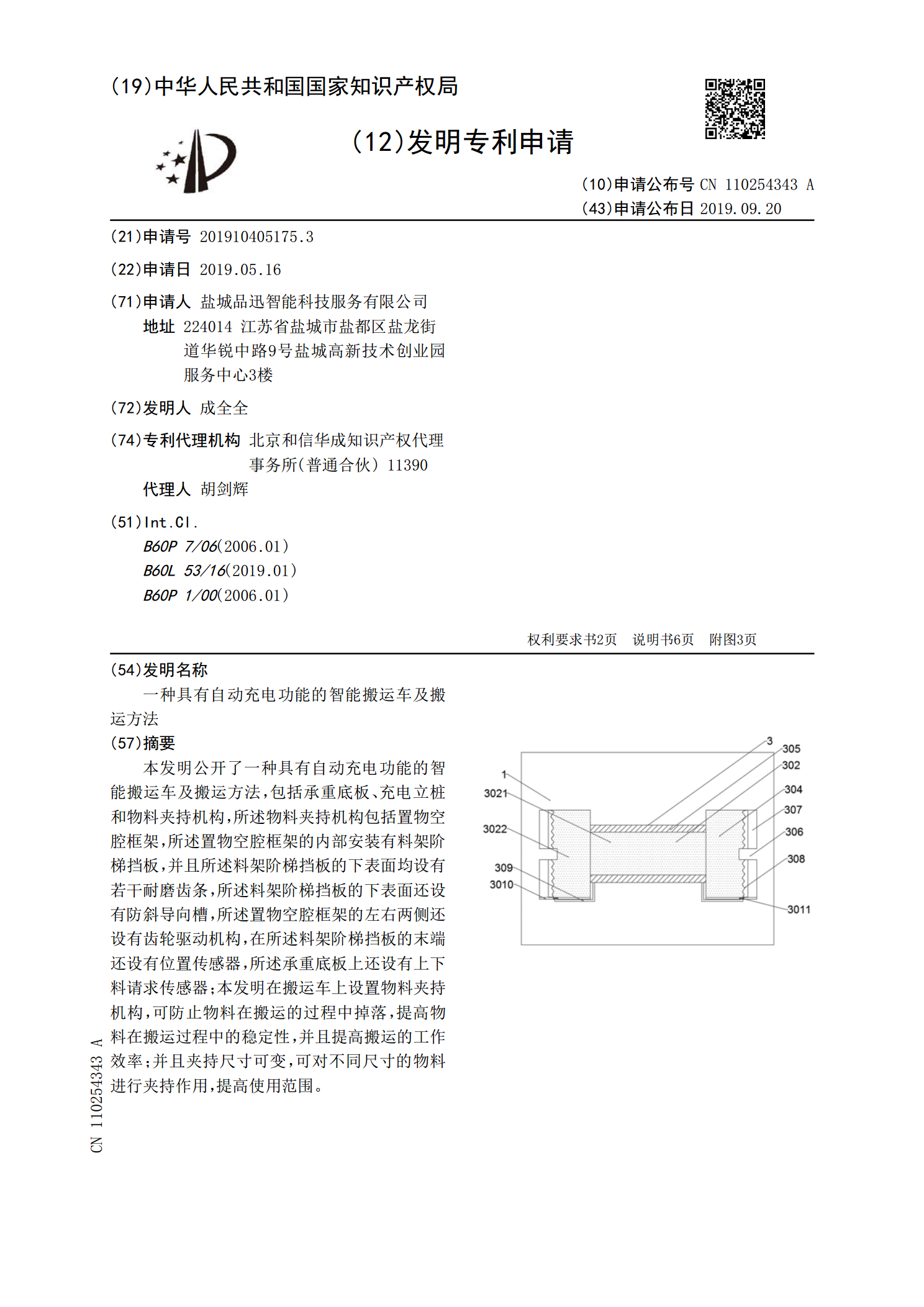
一种具有自动充电功能的智能搬运车及搬运方法.pdf
本发明公开了一种具有自动充电功能的智能搬运车及搬运方法,包括承重底板、充电立桩和物料夹持机构,所述物料夹持机构包括置物空腔框架,所述置物空腔框架的内部安装有料架阶梯挡板,并且所述料架阶梯挡板的下表面均设有若干耐磨齿条,所述料架阶梯挡板的下表面还设有防斜导向槽,所述置物空腔框架的左右两侧还设有齿轮驱动机构,在所述料架阶梯挡板的末端还设有位置传感器,所述承重底板上还设有上下料请求传感器;本发明在搬运车上设置物料夹持机构,可防止物料在搬运的过程中掉落,提高物料在搬运过程中的稳定性,并且提高搬运的工作效率;并且夹
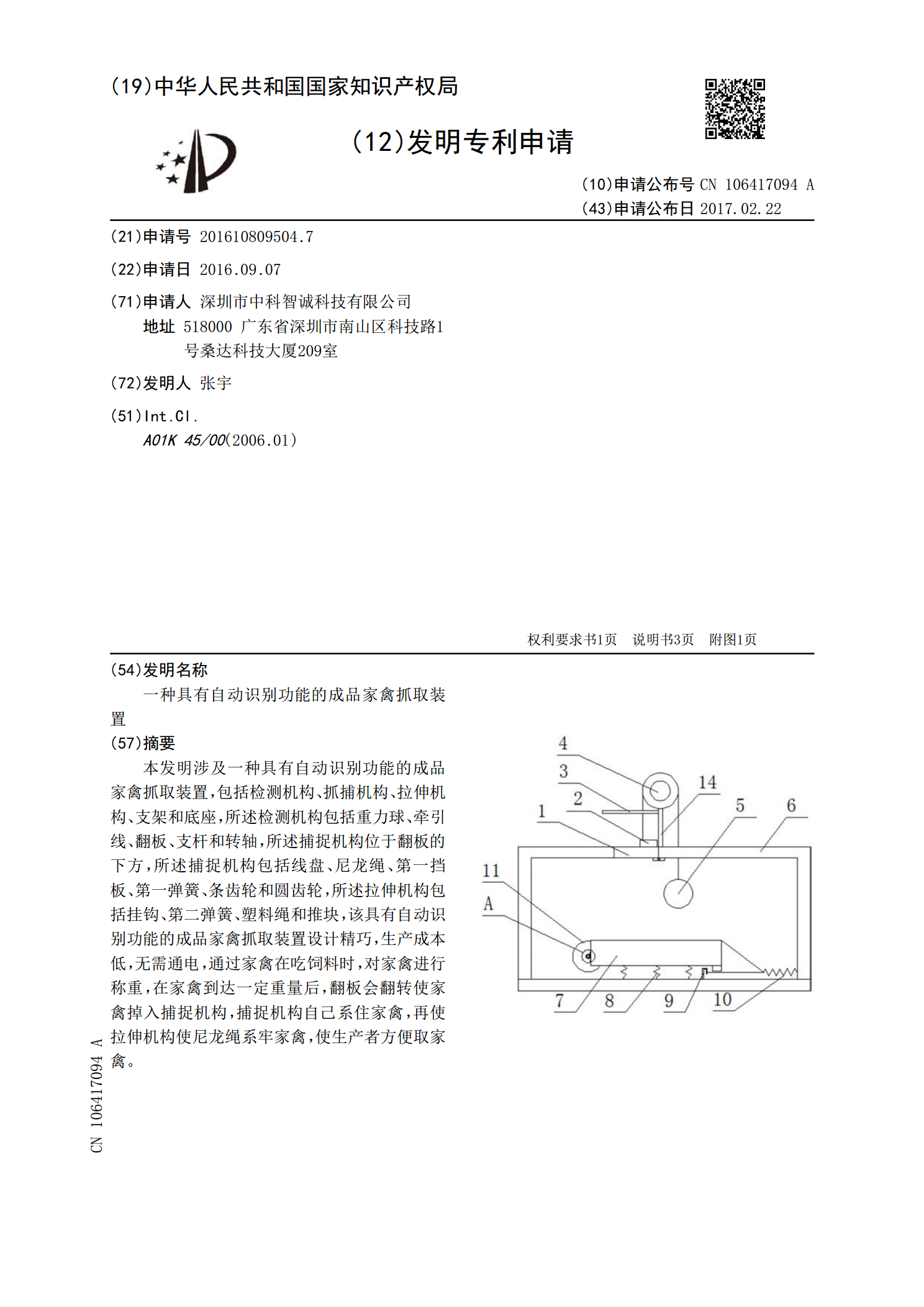
一种具有自动识别功能的成品家禽抓取装置.pdf
本发明涉及一种具有自动识别功能的成品家禽抓取装置,包括检测机构、抓捕机构、拉伸机构、支架和底座,所述检测机构包括重力球、牵引线、翻板、支杆和转轴,所述捕捉机构位于翻板的下方,所述捕捉机构包括线盘、尼龙绳、第一挡板、第一弹簧、条齿轮和圆齿轮,所述拉伸机构包括挂钩、第二弹簧、塑料绳和推块,该具有自动识别功能的成品家禽抓取装置设计精巧,生产成本低,无需通电,通过家禽在吃饲料时,对家禽进行称重,在家禽到达一定重量后,翻板会翻转使家禽掉入捕捉机构,捕捉机构自己系住家禽,再使拉伸机构使尼龙绳系牢家禽,使生产者方便取家