
一种四轮驱动电动汽车滑行控制方法及系统.pdf

志信****pp

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种四轮驱动电动汽车滑行控制方法及系统.pdf
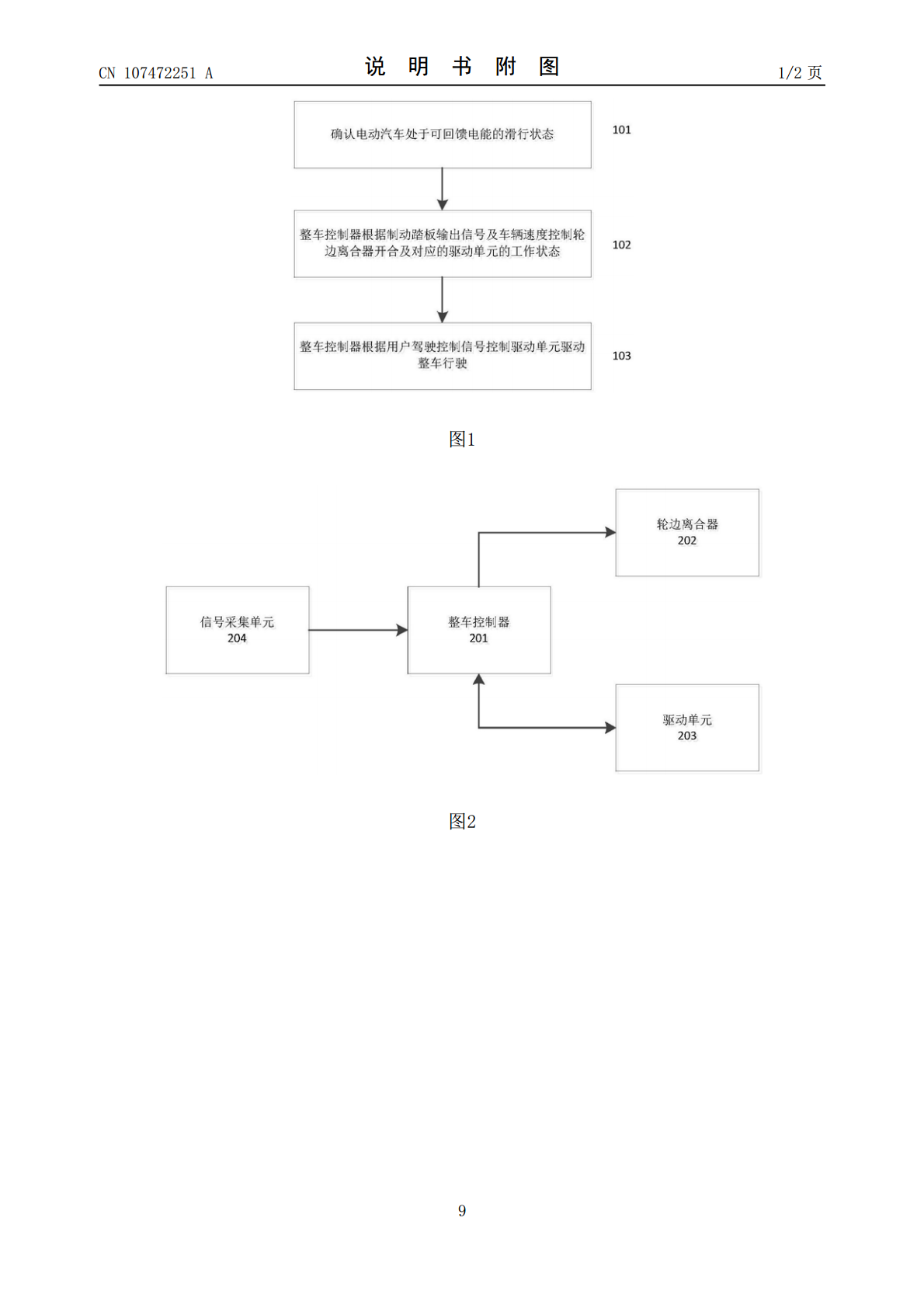
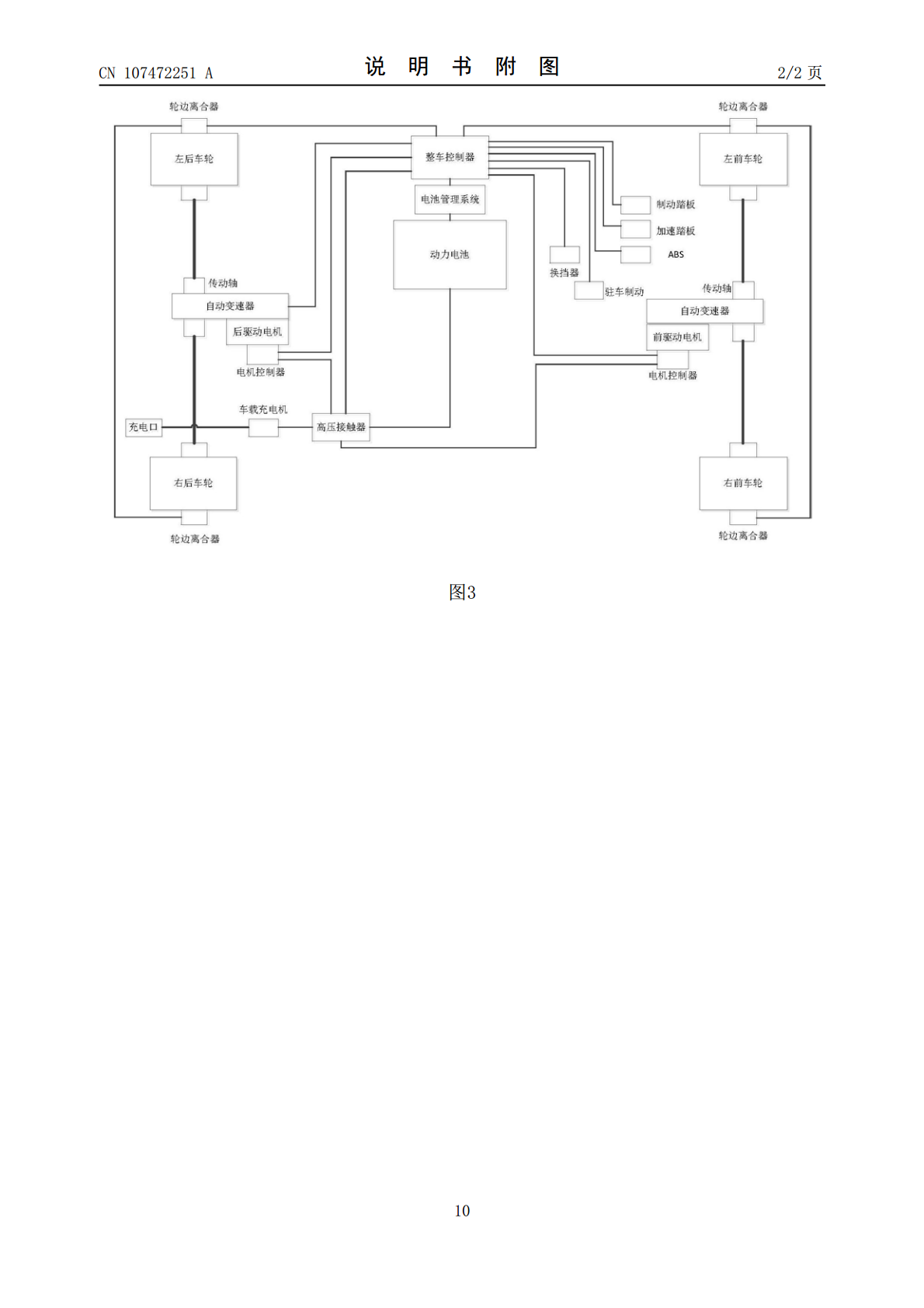
本发明公开了一种四轮驱动电动汽车滑行控制方法及系统,所述方法指确认电动汽车处于可回馈电能的滑行状态,整车控制器根据制动踏板输出信号及车辆速度控制轮边离合器的开合及其对应的驱动单元的工作状态;整车控制器根据用户驾驶控制信号控制驱动单元驱动整车行驶并进行能量回馈;所述系统包括整车控制器、轮边离合器、驱动单元以及信号采集单元;所述整车控制器根据信号采集单元发送的指令控制轮边离合器及驱动单元,所述轮边离合器控制车轮与驱动单元传动轴是否接合,所述驱动单元根据整车控制器指令带动传动轴进行转动;在驾驶动力充足的情况下,

单电机四轮驱动的电动汽车滑行控制方法.pdf
本发明公开了一种单电机四轮驱动的电动汽车滑行控制方法,电动汽车包括整车控制器和一个驱动电机,驱动电机的一端通过前离合器和前驱动减速器相连接,另一端通过后离合器和后驱动减速器相连接,前驱动减速器和前轮相连接,后驱动减速器和后轮相连接;该方法包括以下步骤:整车控制器判断汽车是否处于滑行状态,若判断为汽车处于滑行状态,则直接控制前轮与其轮边离合器相脱离,控制后轮与其轮边离合器相脱离,以及控制驱动电机与前、后离合器相脱离或控制驱动电机停止转动;否则进入正常行驶状态。本发明能够减少滑行状态下的机械损失,更好地节约能
电动汽车的滑行控制系统和方法.pdf
本发明提出一种电动汽车的滑行控制系统和方法,其中,该控制系统包括:变速器,其中,变速器中的输入轴与驱动电机接合以传输驱动电机所产生的动力,输入轴上的动力通过变速器中的一档离合器或二档离合器传递到中间轴上,以通过中间轴传输动力到输出轴,再通过输出部传递至车轮;整车控制器,用于采集电动汽车的状态信息,并根据该状态信息生成滑行行驶指令;变速器控制器,用于在接收到滑行行驶指令时,控制一档离合器和二档离合器脱开,以使输出轴随车轮带动输出部和中间轴旋转。由此,不仅能够使电动汽车同时满足加速时间指标和最高车速指标的要求
一种纯电动汽车滑行控制方法.pdf
本发明公开了一种纯电动汽车滑行控制方法,将车辆模式划分为四种模式,分别是:驱动模式、制动模式、滑行模式和停车模式;当VCU判定车辆进入滑行模式时,VCU向MCU发送一个很小的请求扭矩X;加入扭矩X可以使电机输出轴和传动轴一直保持啮合;而扭矩X产生的牵引力小于车辆受到的阻力,车辆最终会在阻力的作用下停止;当车辆停止时,VCU再清除该扭矩X。本发明通过控制的方式对振动情况进行改善,既不需要增加成本,实现方式简便也不存在安全隐患,通过实车测试改善效果明显。
一种四轮驱动电动汽车启停控制方法及系统.pdf
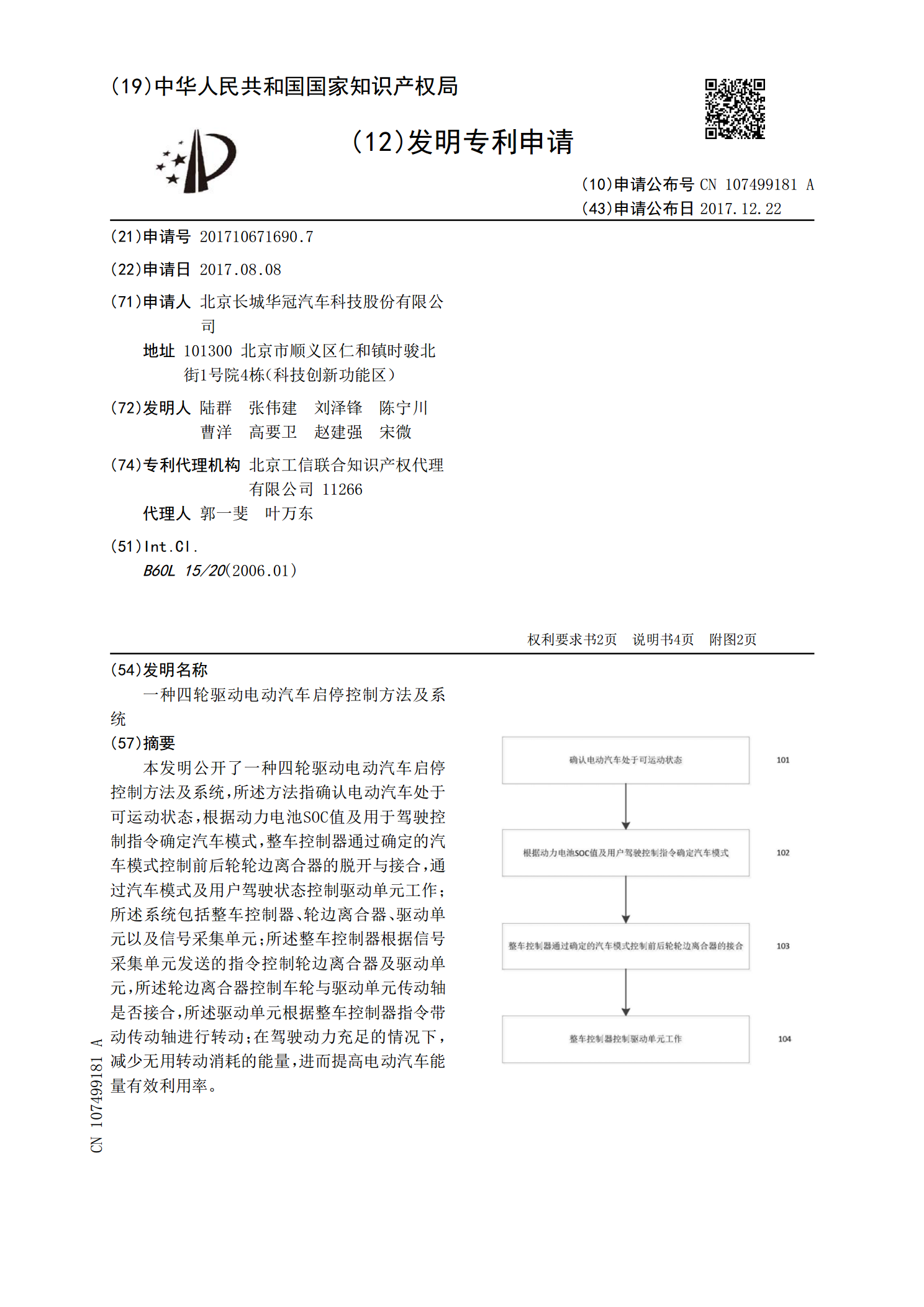
本发明公开了一种四轮驱动电动汽车启停控制方法及系统,所述方法指确认电动汽车处于可运动状态,根据动力电池SOC值及用于驾驶控制指令确定汽车模式,整车控制器通过确定的汽车模式控制前后轮轮边离合器的脱开与接合,通过汽车模式及用户驾驶状态控制驱动单元工作;所述系统包括整车控制器、轮边离合器、驱动单元以及信号采集单元;所述整车控制器根据信号采集单元发送的指令控制轮边离合器及驱动单元,所述轮边离合器控制车轮与驱动单元传动轴是否接合,所述驱动单元根据整车控制器指令带动传动轴进行转动;在驾驶动力充足的情况下,减少无用转动