
一种纯电动汽车滑行控制方法.pdf

兴朝****45

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种纯电动汽车滑行控制方法.pdf
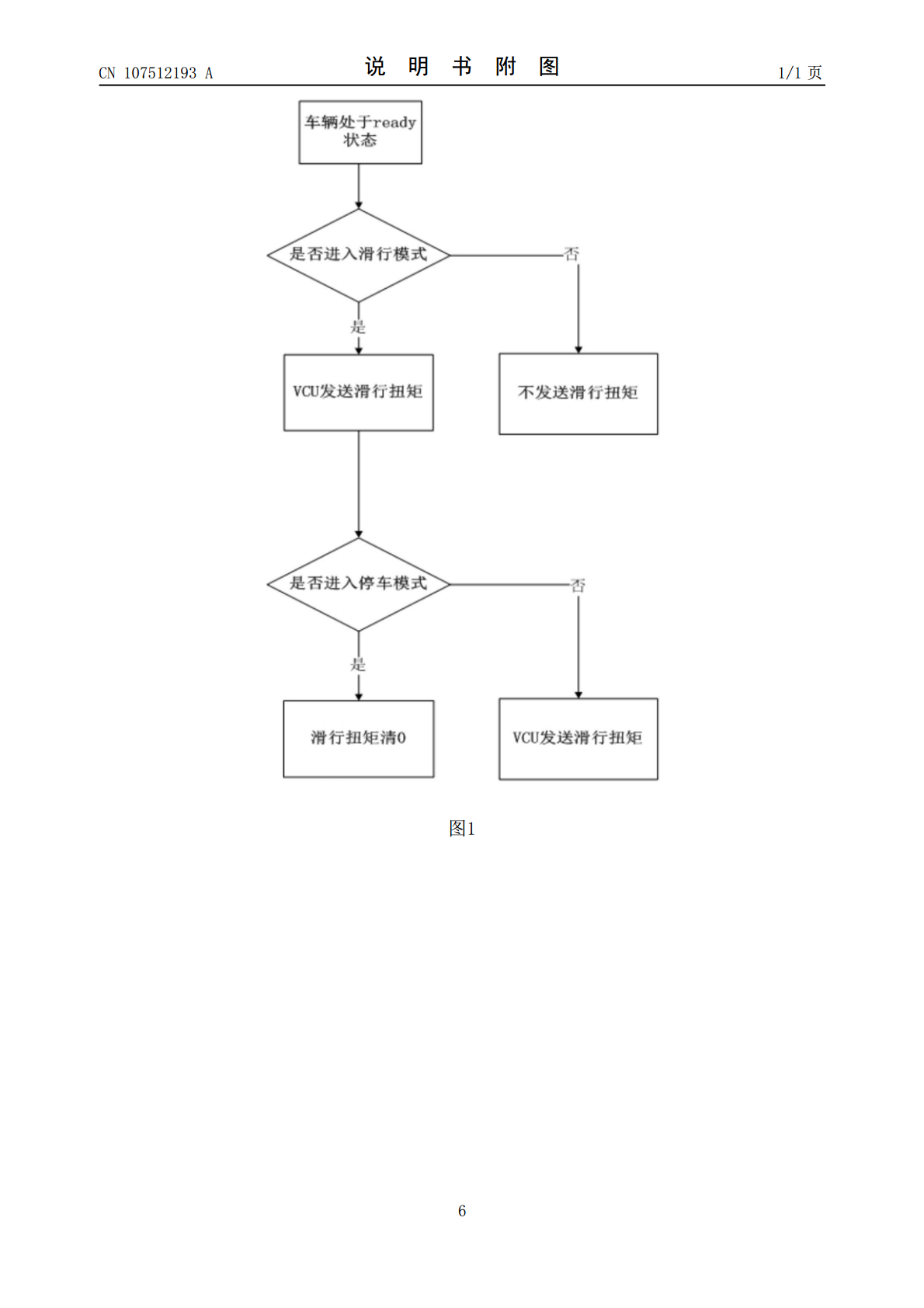
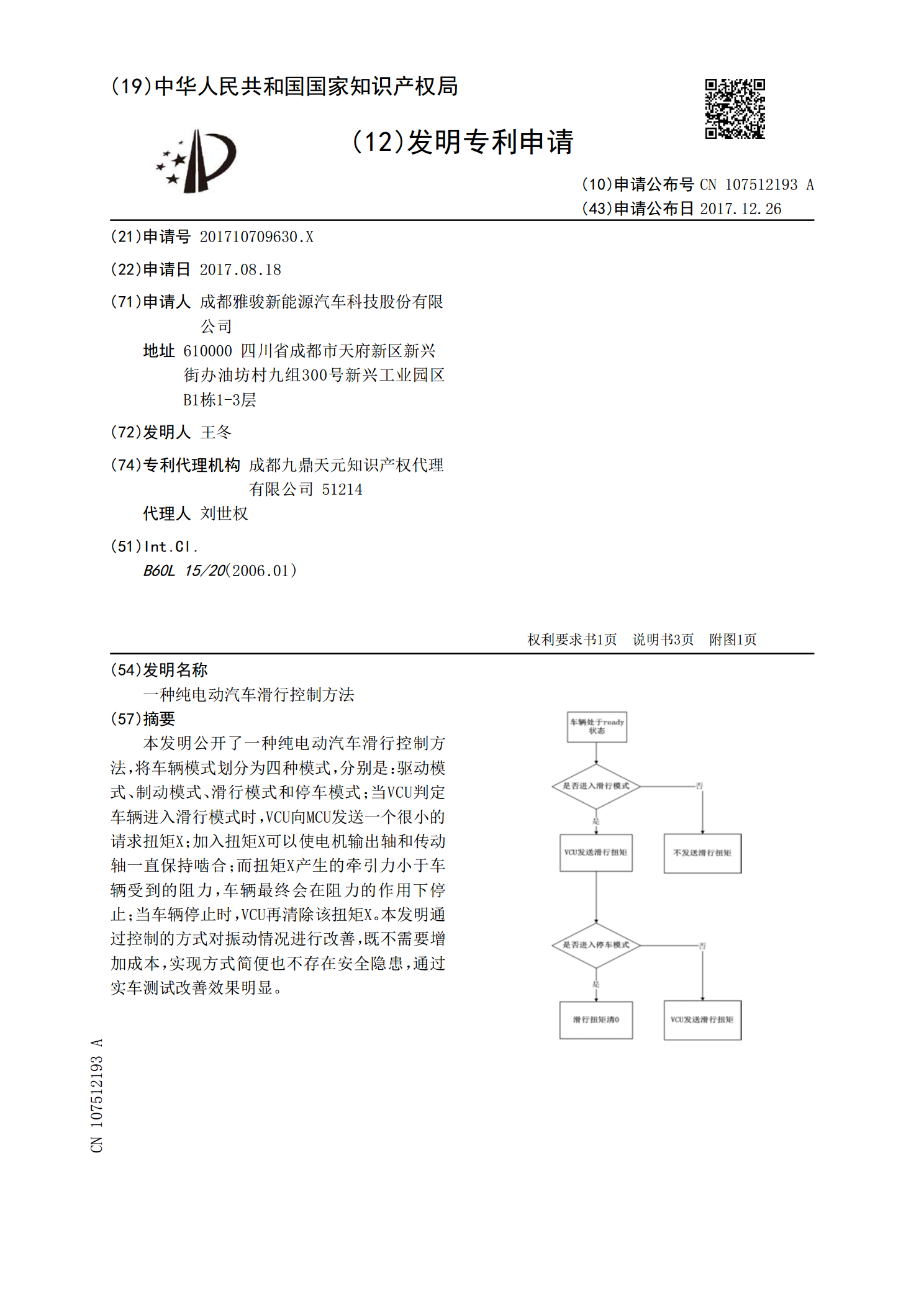
本发明公开了一种纯电动汽车滑行控制方法,将车辆模式划分为四种模式,分别是:驱动模式、制动模式、滑行模式和停车模式;当VCU判定车辆进入滑行模式时,VCU向MCU发送一个很小的请求扭矩X;加入扭矩X可以使电机输出轴和传动轴一直保持啮合;而扭矩X产生的牵引力小于车辆受到的阻力,车辆最终会在阻力的作用下停止;当车辆停止时,VCU再清除该扭矩X。本发明通过控制的方式对振动情况进行改善,既不需要增加成本,实现方式简便也不存在安全隐患,通过实车测试改善效果明显。
一种电动汽车滑行能量回收控制方法.pdf
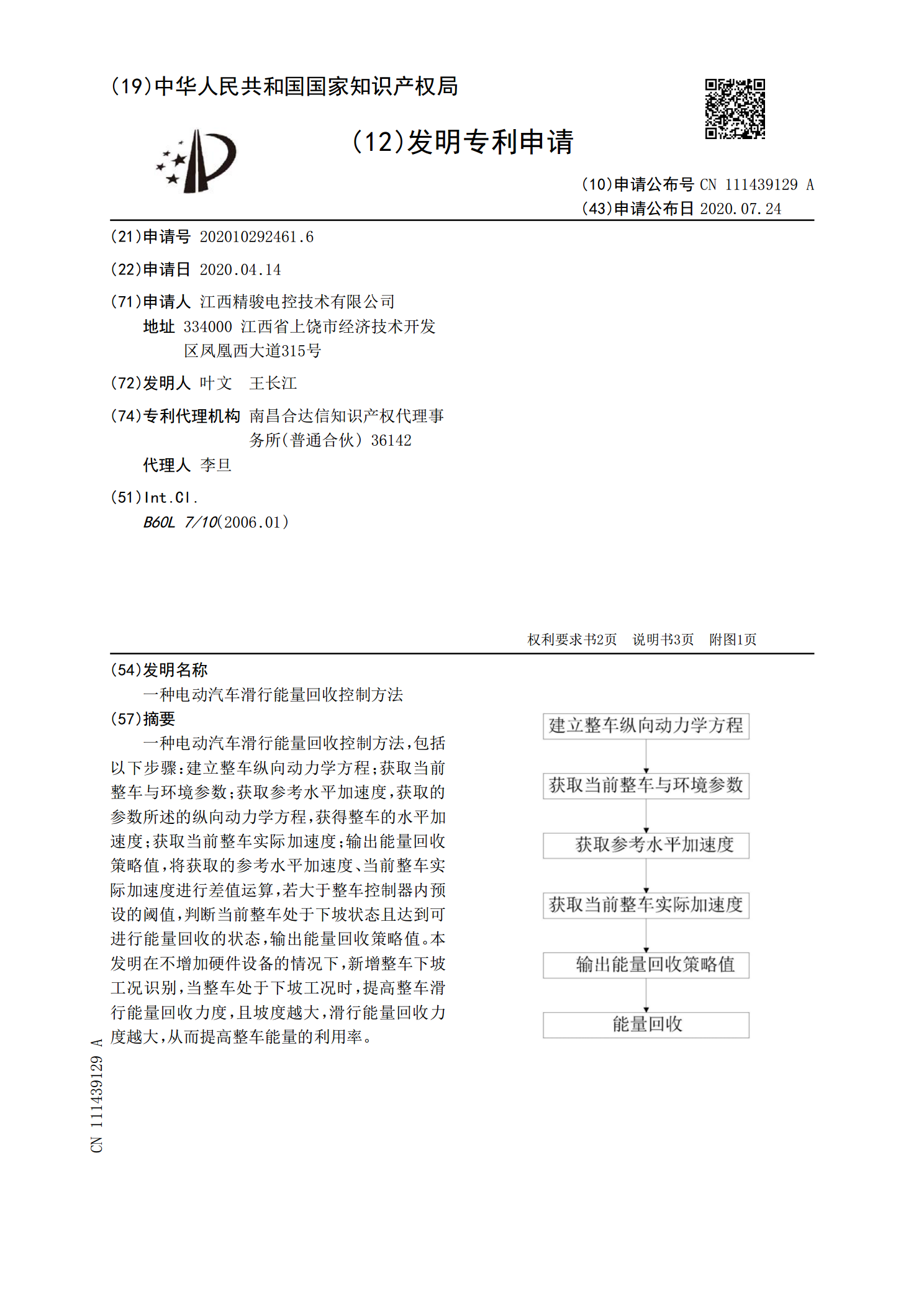
一种电动汽车滑行能量回收控制方法,包括以下步骤:建立整车纵向动力学方程;获取当前整车与环境参数;获取参考水平加速度,获取的参数所述的纵向动力学方程,获得整车的水平加速度;获取当前整车实际加速度;输出能量回收策略值,将获取的参考水平加速度、当前整车实际加速度进行差值运算,若大于整车控制器内预设的阈值,判断当前整车处于下坡状态且达到可进行能量回收的状态,输出能量回收策略值。本发明在不增加硬件设备的情况下,新增整车下坡工况识别,当整车处于下坡工况时,提高整车滑行能量回收力度,且坡度越大,滑行能量回收力度越大,从
一种纯电动汽车的制动灯控制方法、系统及纯电动汽车.pdf
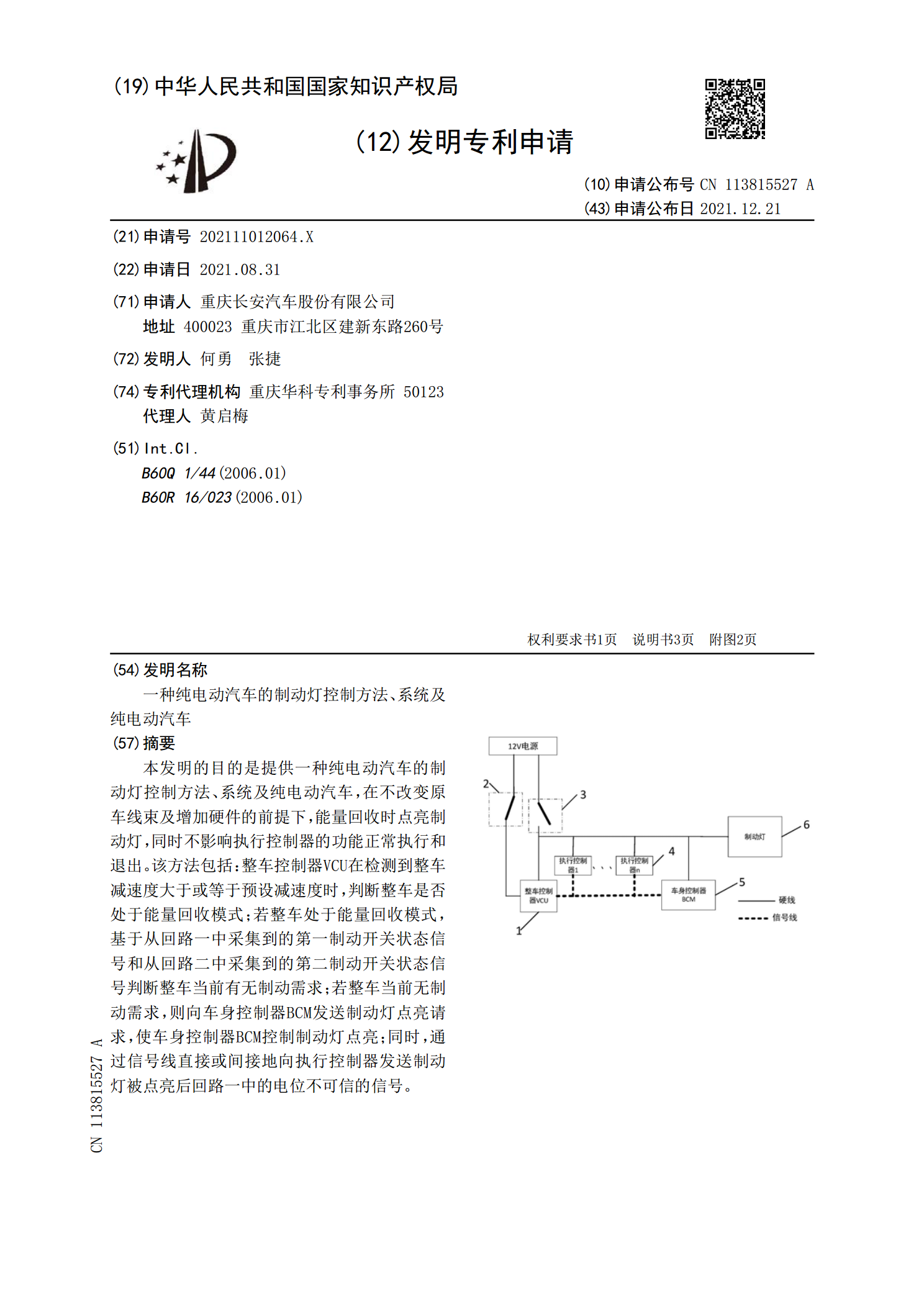
本发明的目的是提供一种纯电动汽车的制动灯控制方法、系统及纯电动汽车,在不改变原车线束及增加硬件的前提下,能量回收时点亮制动灯,同时不影响执行控制器的功能正常执行和退出。该方法包括:整车控制器VCU在检测到整车减速度大于或等于预设减速度时,判断整车是否处于能量回收模式;若整车处于能量回收模式,基于从回路一中采集到的第一制动开关状态信号和从回路二中采集到的第二制动开关状态信号判断整车当前有无制动需求;若整车当前无制动需求,则向车身控制器BCM发送制动灯点亮请求,使车身控制器BCM控制制动灯点亮;同时,通过信号
一种纯电动汽车动力控制装置及其控制方法.pdf
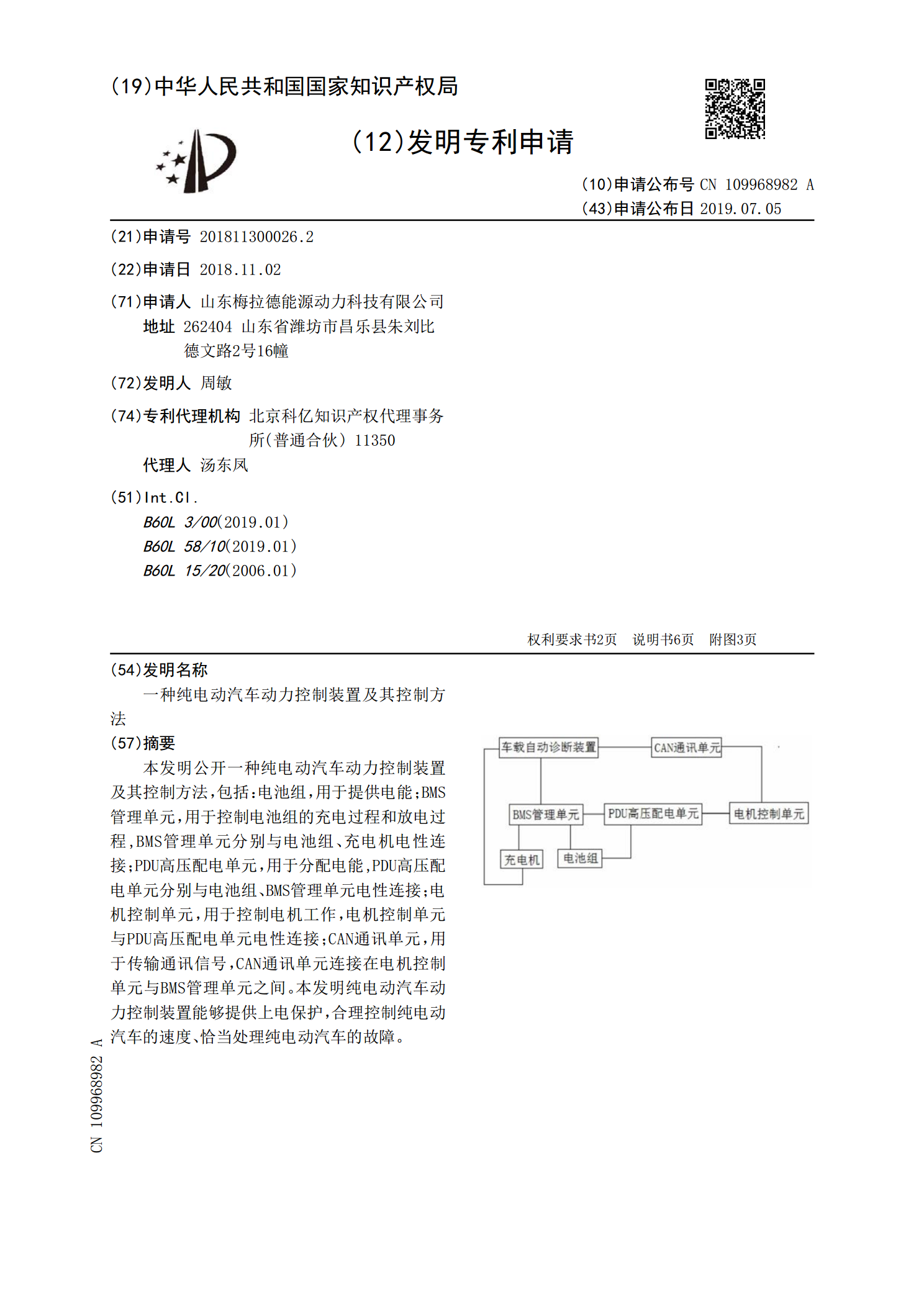
本发明公开一种纯电动汽车动力控制装置及其控制方法,包括:电池组,用于提供电能;BMS管理单元,用于控制电池组的充电过程和放电过程,BMS管理单元分别与电池组、充电机电性连接;PDU高压配电单元,用于分配电能,PDU高压配电单元分别与电池组、BMS管理单元电性连接;电机控制单元,用于控制电机工作,电机控制单元与PDU高压配电单元电性连接;CAN通讯单元,用于传输通讯信号,CAN通讯单元连接在电机控制单元与BMS管理单元之间。本发明纯电动汽车动力控制装置能够提供上电保护,合理控制纯电动汽车的速度、恰当处理纯电
一种纯电动汽车整车控制系统及控制方法.pdf
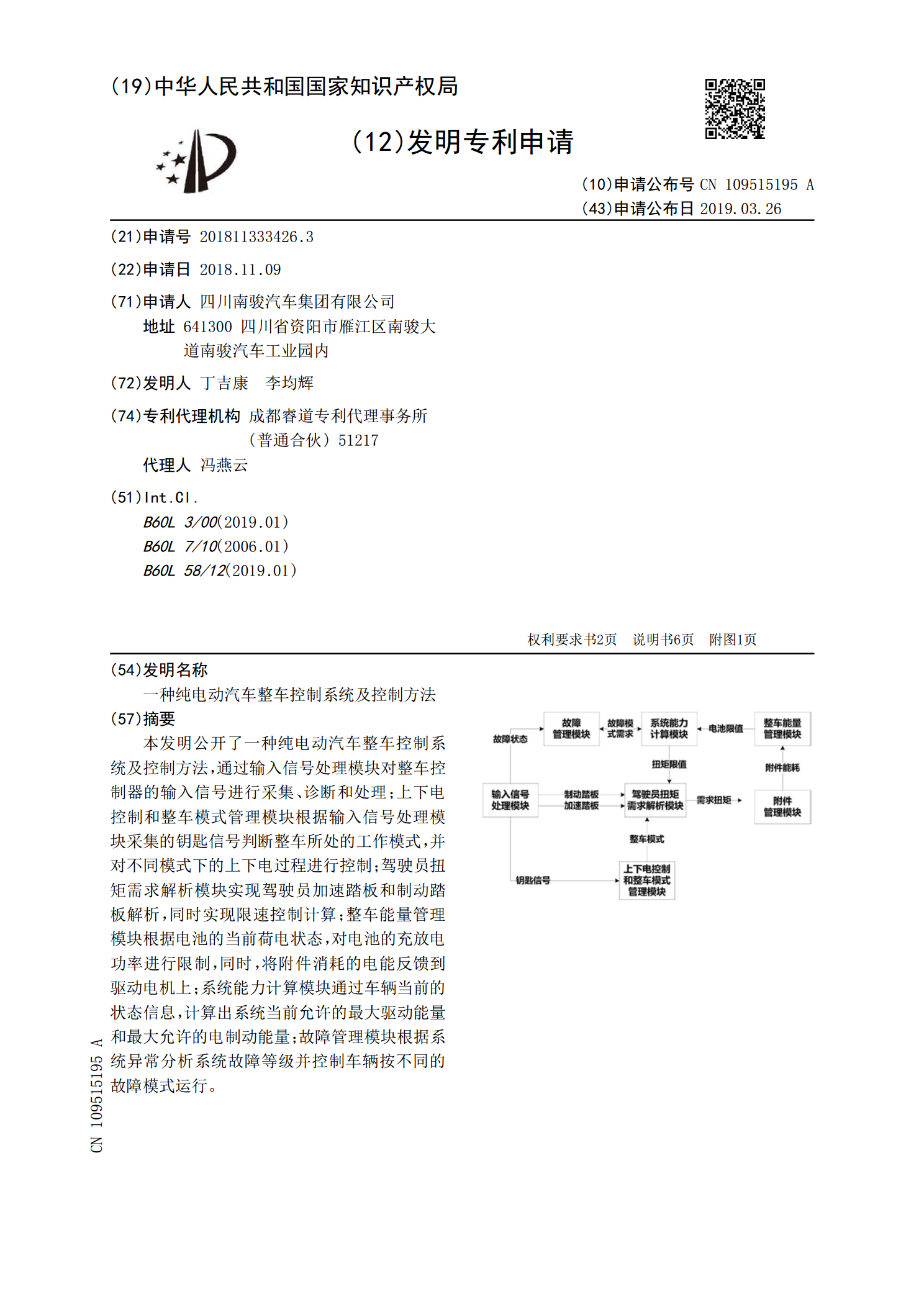
本发明公开了一种纯电动汽车整车控制系统及控制方法,通过输入信号处理模块对整车控制器的输入信号进行采集、诊断和处理;上下电控制和整车模式管理模块根据输入信号处理模块采集的钥匙信号判断整车所处的工作模式,并对不同模式下的上下电过程进行控制;驾驶员扭矩需求解析模块实现驾驶员加速踏板和制动踏板解析,同时实现限速控制计算;整车能量管理模块根据电池的当前荷电状态,对电池的充放电功率进行限制,同时,将附件消耗的电能反馈到驱动电机上;系统能力计算模块通过车辆当前的状态信息,计算出系统当前允许的最大驱动能量和最大允许的电制