
一种仿人手肩关节的新型三自由度并联机器人.pdf

灵波****ng

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种仿人手肩关节的新型三自由度并联机器人.pdf
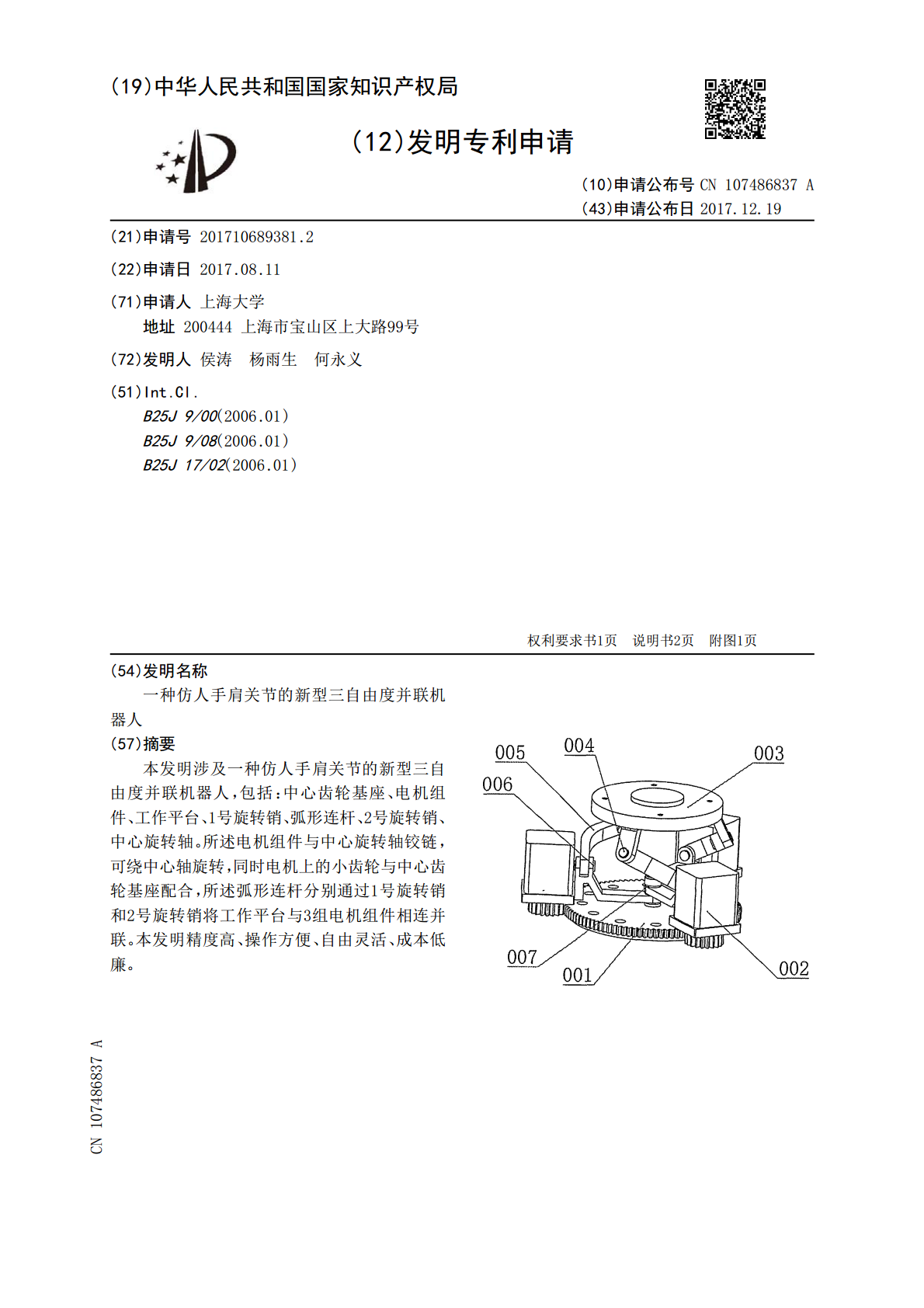
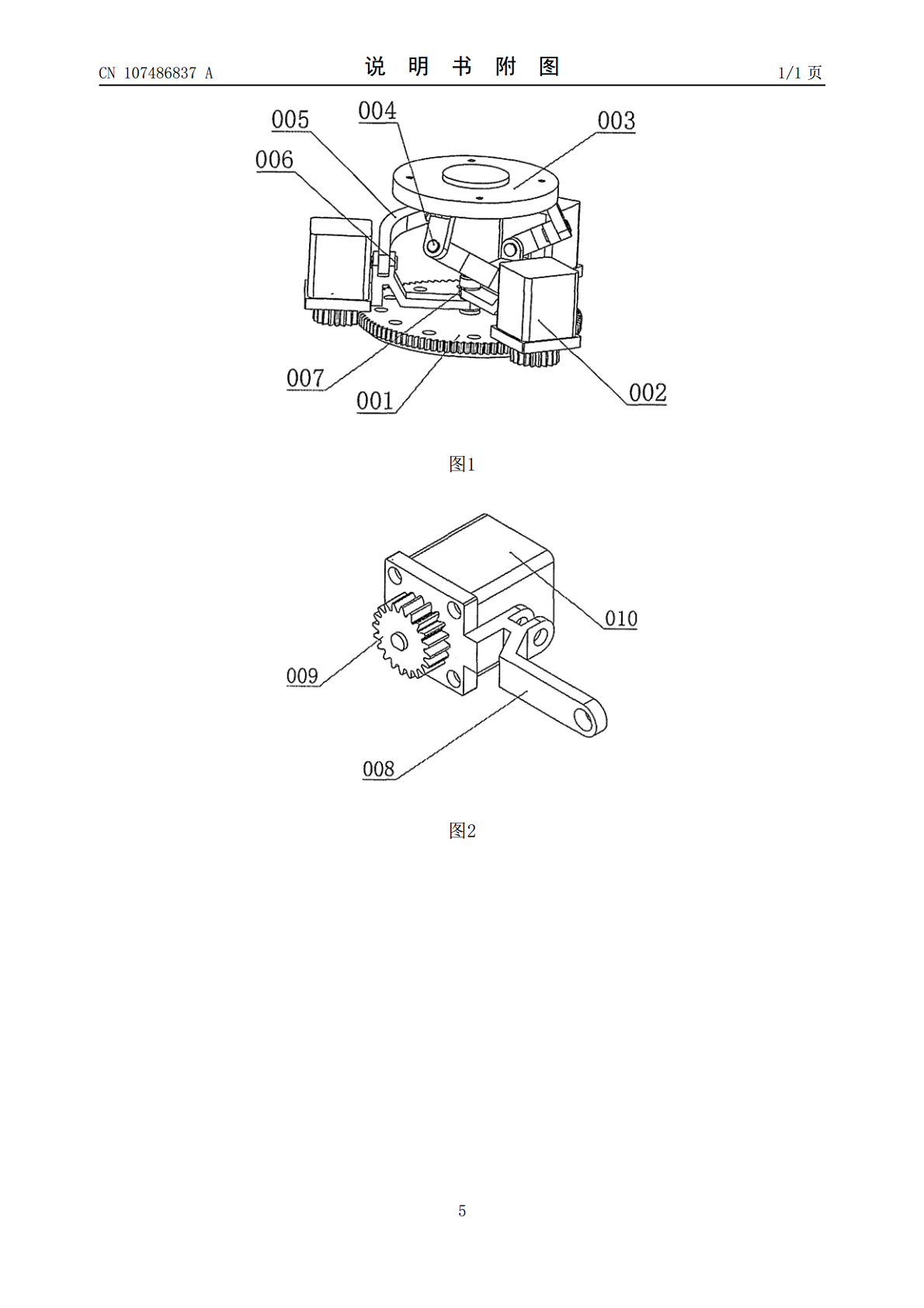
本发明涉及一种仿人手肩关节的新型三自由度并联机器人,包括:中心齿轮基座、电机组件、工作平台、1号旋转销、弧形连杆、2号旋转销、中心旋转轴。所述电机组件与中心旋转轴铰链,可绕中心轴旋转,同时电机上的小齿轮与中心齿轮基座配合,所述弧形连杆分别通过1号旋转销和2号旋转销将工作平台与3组电机组件相连并联。本发明精度高、操作方便、自由灵活、成本低廉。

一种仿人手腕关节的新型二自由度并联机器人.pdf
本发明涉及一种仿人手腕关节的新型二自由度并联机器人,包括:基座、过渡安装板、电机组件、齿轮、随动指向机构。其特征在于:所述两组电机组件通过螺钉安装在基座中部,所述随动指向机构通过安装在过渡安装板的四个圆孔中,同时随动指向机构通过齿轮与电机组件连接,本发明精度高、操作方便、自由灵活、成本低廉。

一种两自由度仿人手腕装置.pdf
本发明属于仿人机器人领域,特别涉及一种两自由度仿人手腕机械装置,包括翻转机构及旋转机构。所述翻转机构包括基座、第一动力单元、第一传动单元和侧翻平台,可以实现内外翻转运动。所述旋转机构包括第二动力单元、第二传动单元和转动平台,可以实现内外旋转运动。所述翻转机构与所述旋转机构通过所述第二传动单元中的圆孔齿轮连接。所述装置结构紧凑、质量轻,能模拟人手腕内外翻转和内外旋转的动作,可作仿人机器人手腕使用,也可以安装在假肢手上。

仿人机器人两自由度并联低频机械足.pdf
本发明公开了一种仿人机器人两自由度并联低频机械足,属于仿人机器人领域。它包括踝关节、趾关节、脚趾、跖骨板A和跖骨板B;跖骨板A与跖骨板B相互平行装设;脚趾通过趾关节与跖骨板A、跖骨板B相连,小腿杆通过踝关节与跖骨板A、跖骨板B相连;趾关节包括趾关节本体、大齿轮B、第二转轴、小齿轮B和第二电机;趾关节本体的两端分别通过两轴承装设于跖骨板A、跖骨板B上;第二转轴的两端分别装设于跖骨板A、跖骨板B上;踝关节包括踝关节本体、大齿轮A、第一转轴、小齿轮A和第一电机。本发明是一种结构简单、具有两个自由度、低频运动响应

一种新型4自由度高速并联机器人设计方法.docx
一种新型4自由度高速并联机器人设计方法标题:一种新型4自由度高速并联机器人设计方法摘要:本论文提出了一种新型的4自由度高速并联机器人设计方法,该方法以提高机器人运动效率和精度为目标,结合机器人动力学建模与最优化设计技术,对机器人结构进行优化设计。本文首先介绍了并联机器人的基本概念和分类,然后详细阐述了新型4自由度高速并联机器人的设计方法及关键技术,最后通过仿真实验验证了该设计方法的有效性和性能优势。关键词:4自由度高速并联机器人,设计方法,动力学建模,最优化设计,仿真实验一、引言并联机器人是一类具有多个并