
一种巡检机器人及其巡检机器人的在线充电定位方法.pdf

是浩****32

1/8

2/8
3/8

4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种巡检机器人及其巡检机器人的在线充电定位方法.pdf
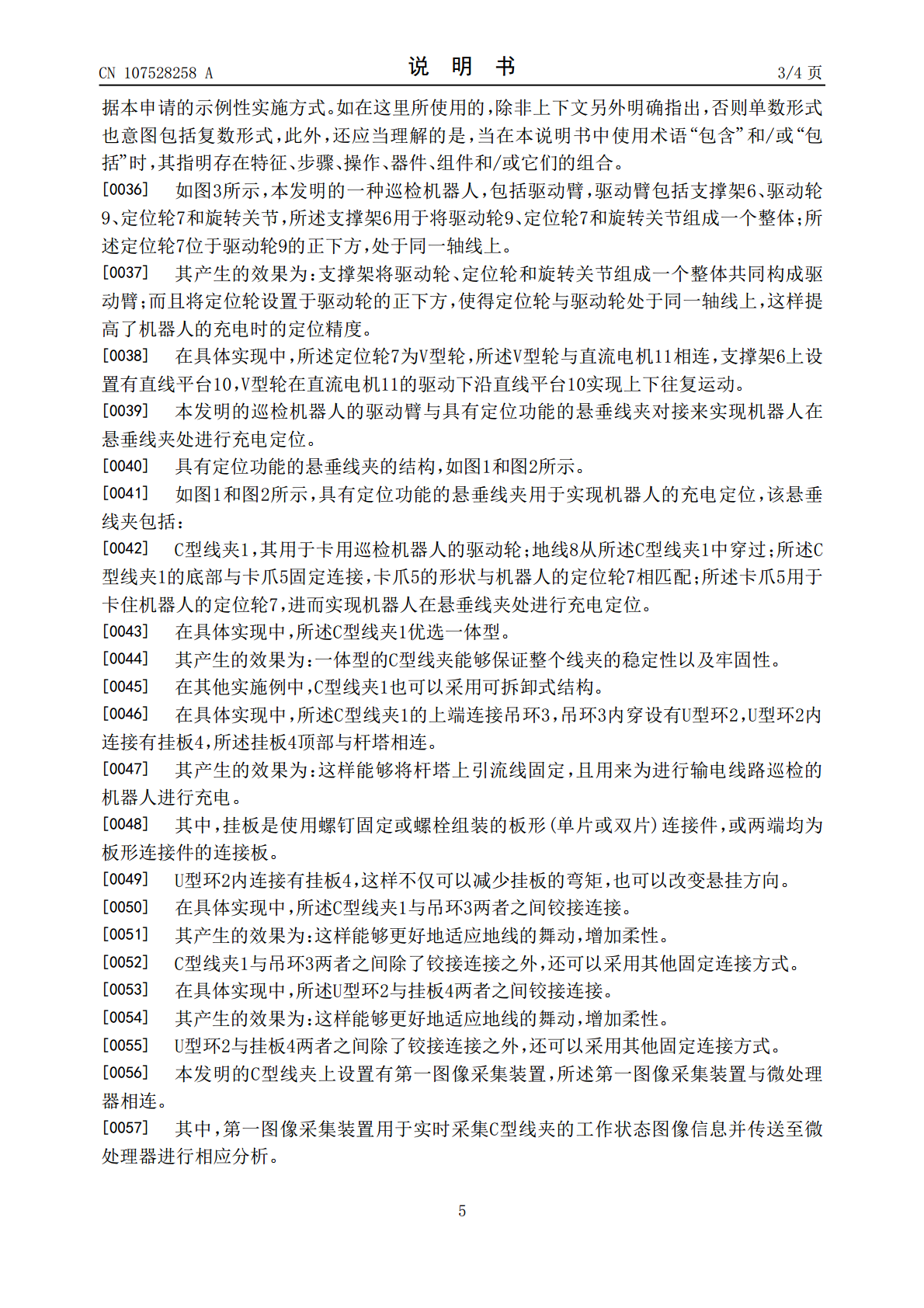
本发明公开了一种巡检机器人及其巡检机器人的在线充电定位方法。其中,巡检机器人,包括驱动臂,所述驱动臂上设置有驱动轮和定位轮,所述定位轮位于驱动轮的正下方,处于同一轴线上;所述驱动臂与具有定位功能的悬垂线夹对接来实现机器人在悬垂线夹处进行充电定位;所述悬垂线夹包括:C型线夹,其用于卡用巡检机器人的驱动轮;所述C型线夹的底部与卡爪固定连接,卡爪的形状与机器人的定位轮相匹配;所述卡爪用于卡住机器人的定位轮,进而实现机器人在悬垂线夹处的定位。
一种巡检机器人及其巡检方法.pdf
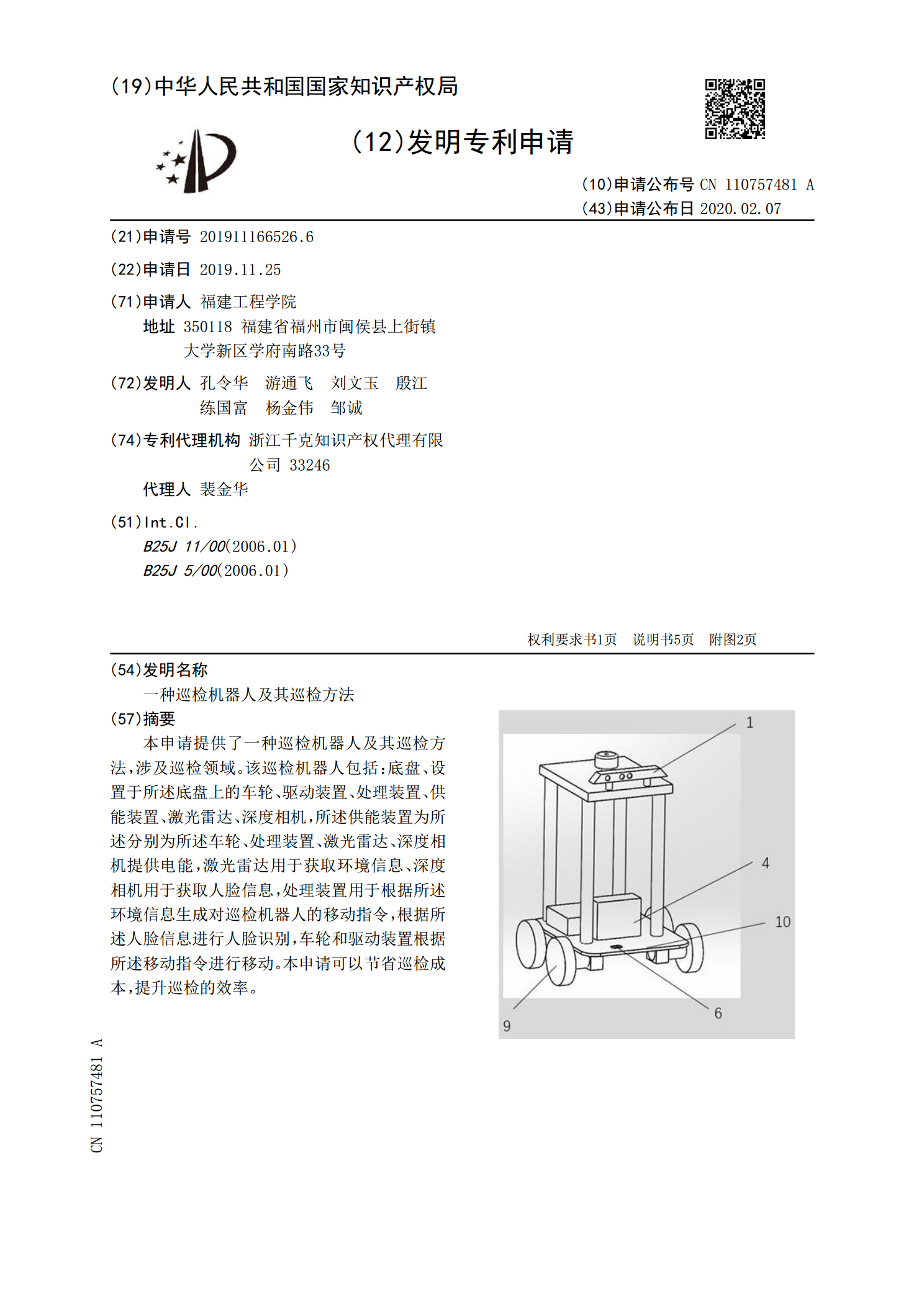
本申请提供了一种巡检机器人及其巡检方法,涉及巡检领域。该巡检机器人包括:底盘、设置于所述底盘上的车轮、驱动装置、处理装置、供能装置、激光雷达、深度相机,所述供能装置为所述分别为所述车轮、处理装置、激光雷达、深度相机提供电能,激光雷达用于获取环境信息、深度相机用于获取人脸信息,处理装置用于根据所述环境信息生成对巡检机器人的移动指令,根据所述人脸信息进行人脸识别,车轮和驱动装置根据所述移动指令进行移动。本申请可以节省巡检成本,提升巡检的效率。

巡检机器人及其巡检方法.pdf
本发明涉及一种巡检机器人及其巡检方法,巡检机器人包括:飞控设备箱,飞行机构,包括可转动的旋翼;行走机构,包括连接支架与行走支撑轮,连接支架连接于飞控设备箱,行走支撑轮可转动地设置于连接支架上;引导机构,包括引导杆,引导杆与连接支架共同形成引导路径。上述巡检机器人,控制系统控制飞行机构使其飞行至输电线路上方,然后可控制引导机构与输电线路接触,并使输电线路与引导杆及连接支架保持接触并相对滑动,从而使输电线路沿引导路径与行走支撑轮重合。如此,无需通过人力将巡检机器人送上输电线路,具有较高的工作效率。
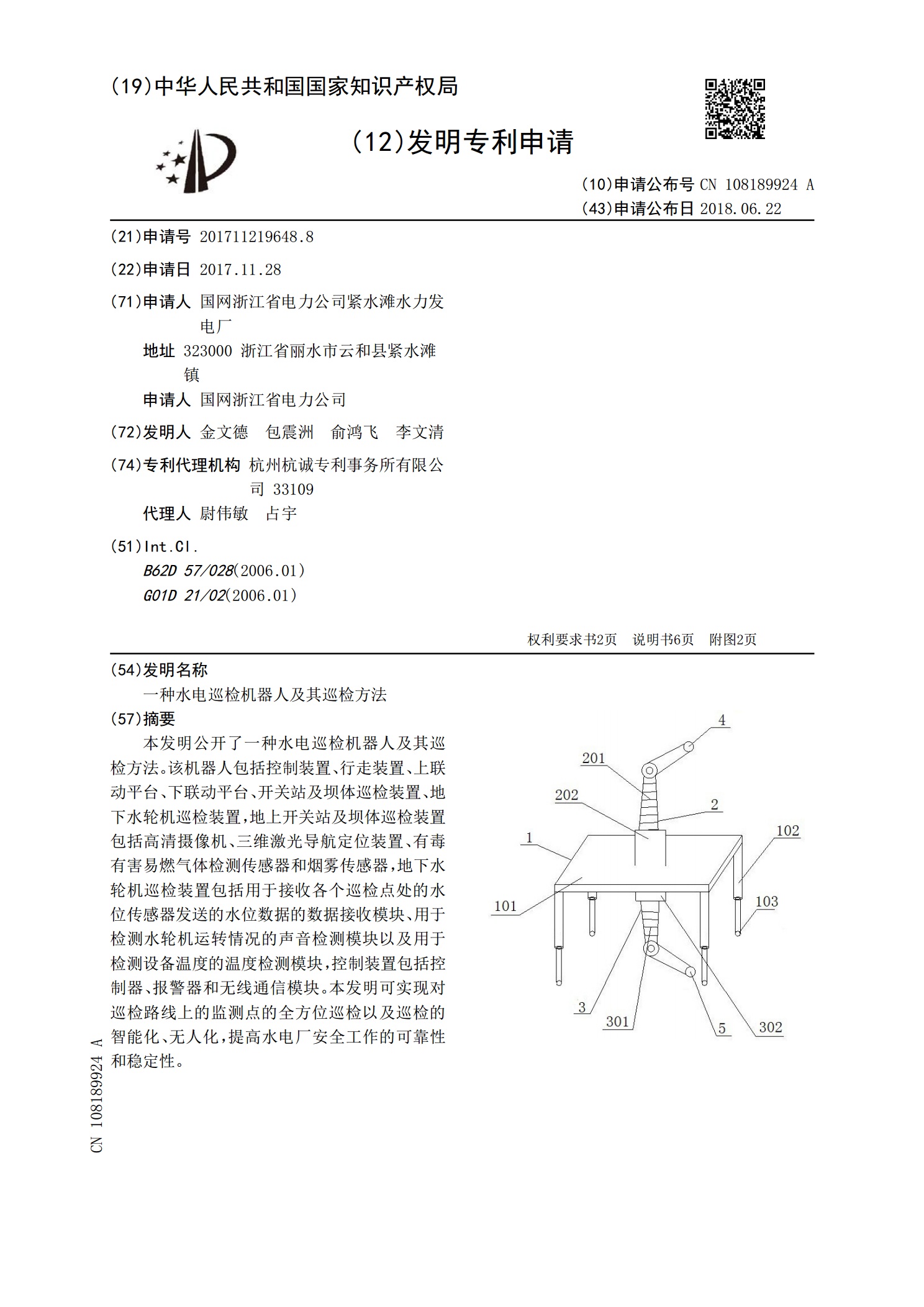
一种水电巡检机器人及其巡检方法.pdf
本发明公开了一种水电巡检机器人及其巡检方法。该机器人包括控制装置、行走装置、上联动平台、下联动平台、开关站及坝体巡检装置、地下水轮机巡检装置,地上开关站及坝体巡检装置包括高清摄像机、三维激光导航定位装置、有毒有害易燃气体检测传感器和烟雾传感器,地下水轮机巡检装置包括用于接收各个巡检点处的水位传感器发送的水位数据的数据接收模块、用于检测水轮机运转情况的声音检测模块以及用于检测设备温度的温度检测模块,控制装置包括控制器、报警器和无线通信模块。本发明可实现对巡检路线上的监测点的全方位巡检以及巡检的智能化、无人化
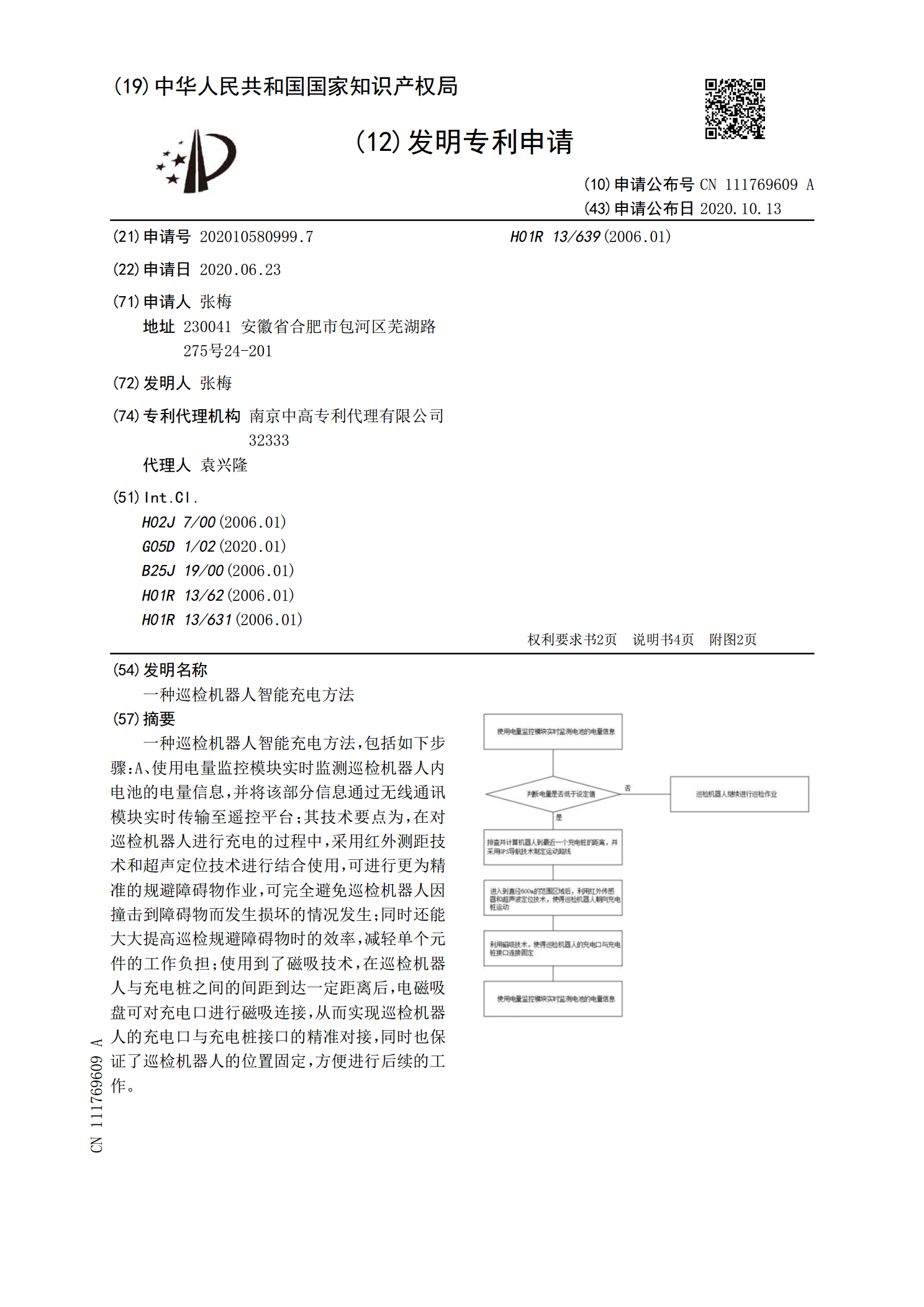
一种巡检机器人智能充电方法.pdf
一种巡检机器人智能充电方法,包括如下步骤:A、使用电量监控模块实时监测巡检机器人内电池的电量信息,并将该部分信息通过无线通讯模块实时传输至遥控平台;其技术要点为,在对巡检机器人进行充电的过程中,采用红外测距技术和超声定位技术进行结合使用,可进行更为精准的规避障碍物作业,可完全避免巡检机器人因撞击到障碍物而发生损坏的情况发生;同时还能大大提高巡检规避障碍物时的效率,减轻单个元件的工作负担;使用到了磁吸技术,在巡检机器人与充电桩之间的间距到达一定距离后,电磁吸盘可对充电口进行磁吸连接,从而实现巡检机器人的充电