
一种高强度大传动比线齿轮传动机构及其设计方法.pdf

Ch****91

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高强度大传动比线齿轮传动机构及其设计方法.pdf
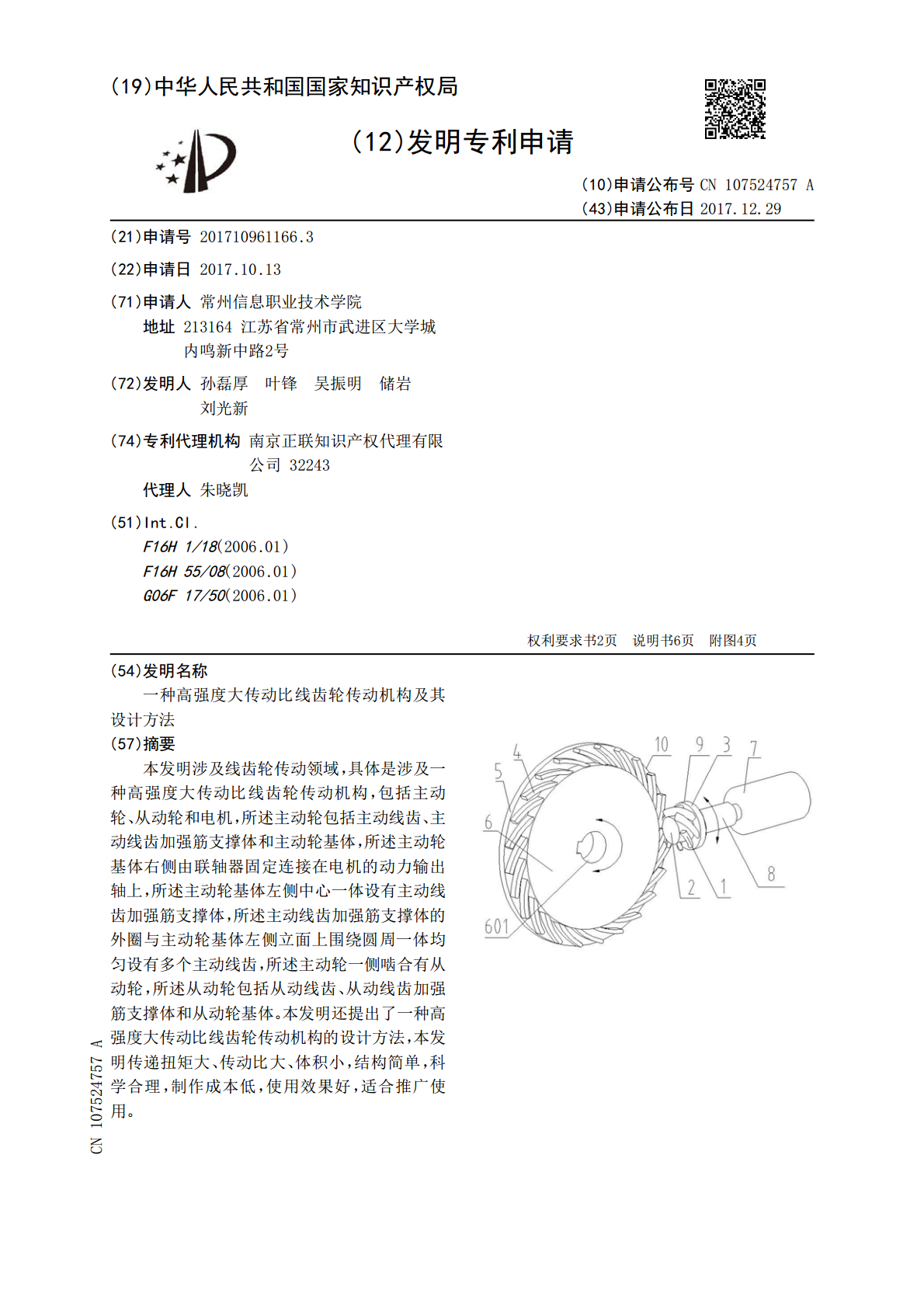
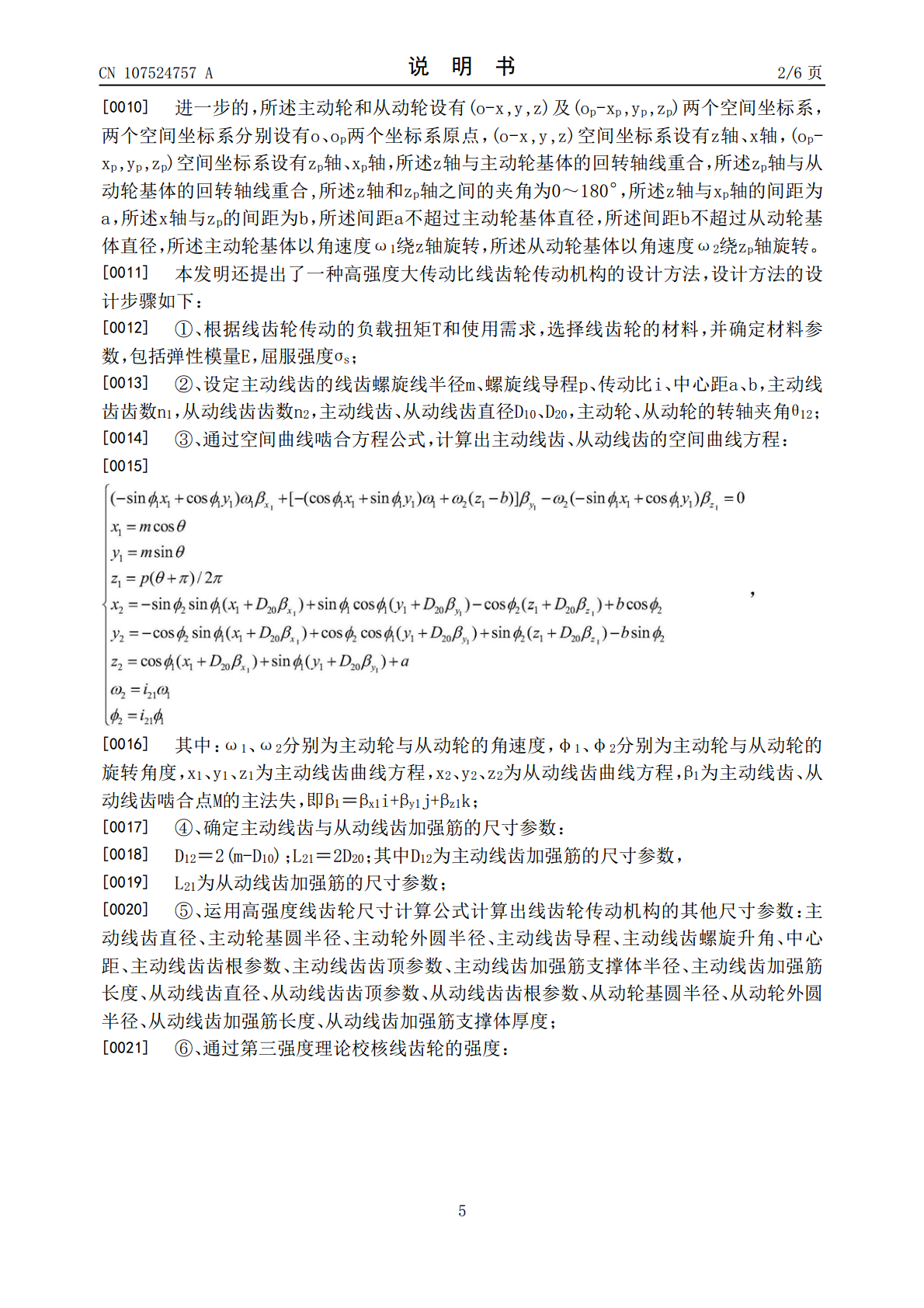
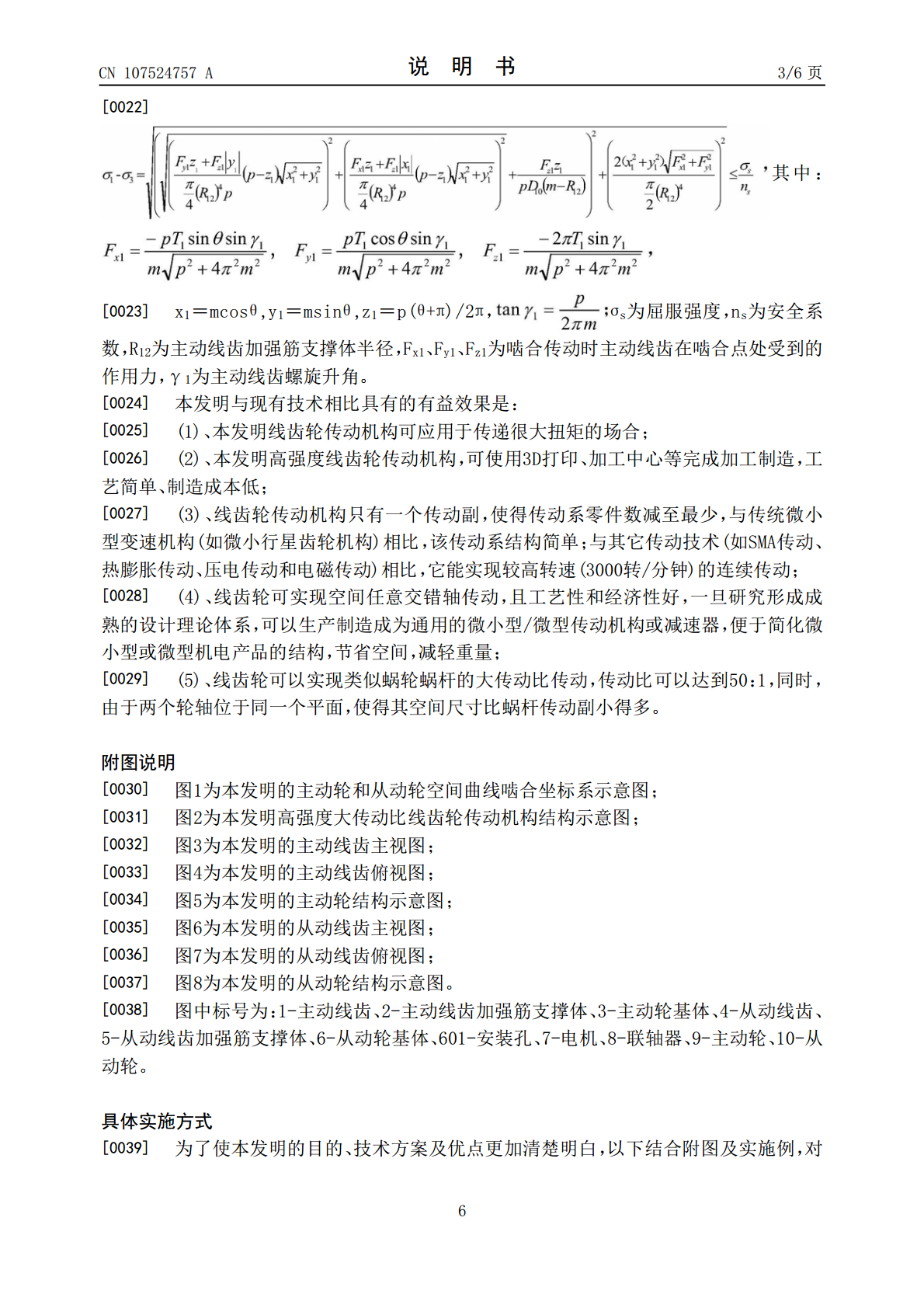
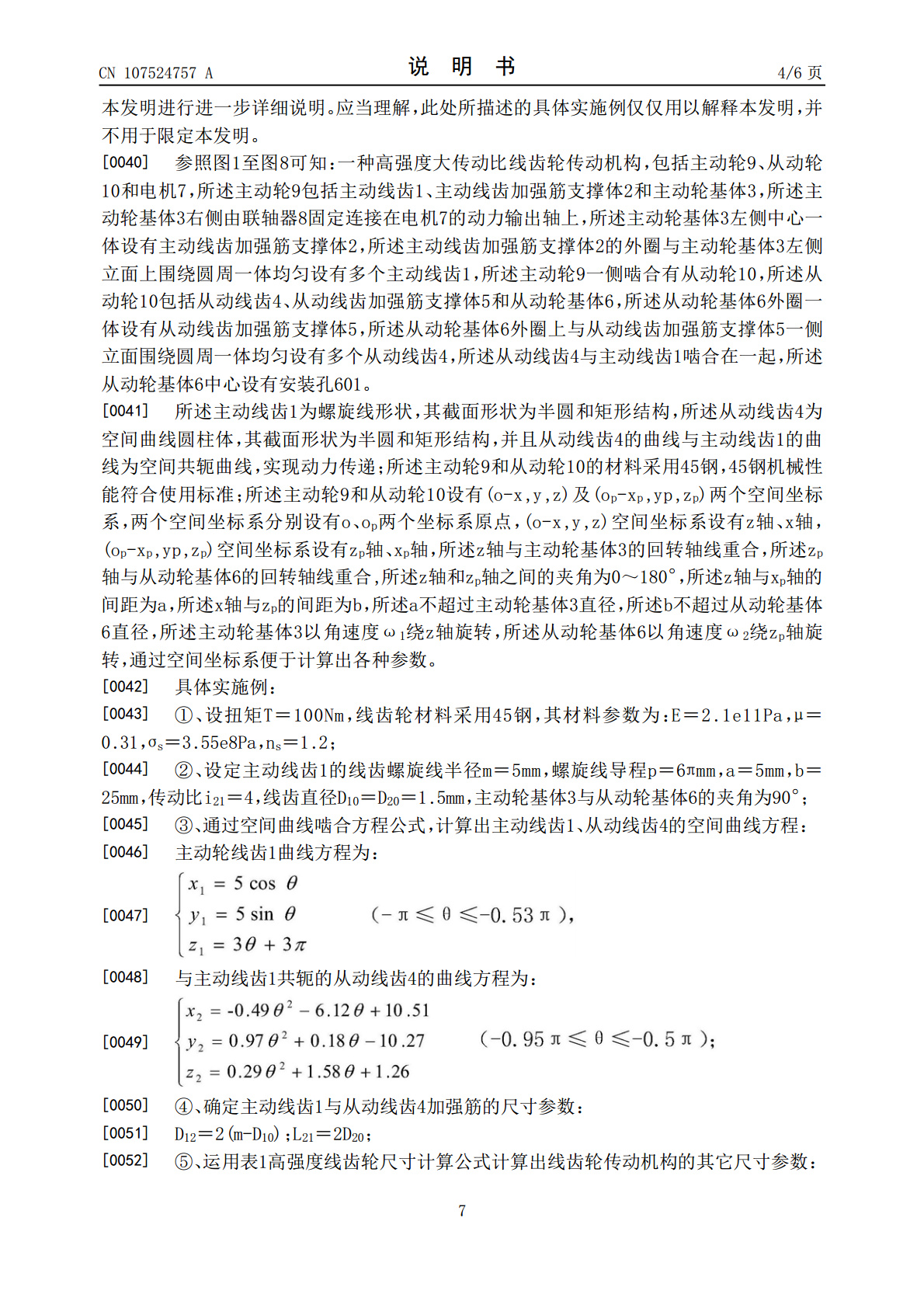
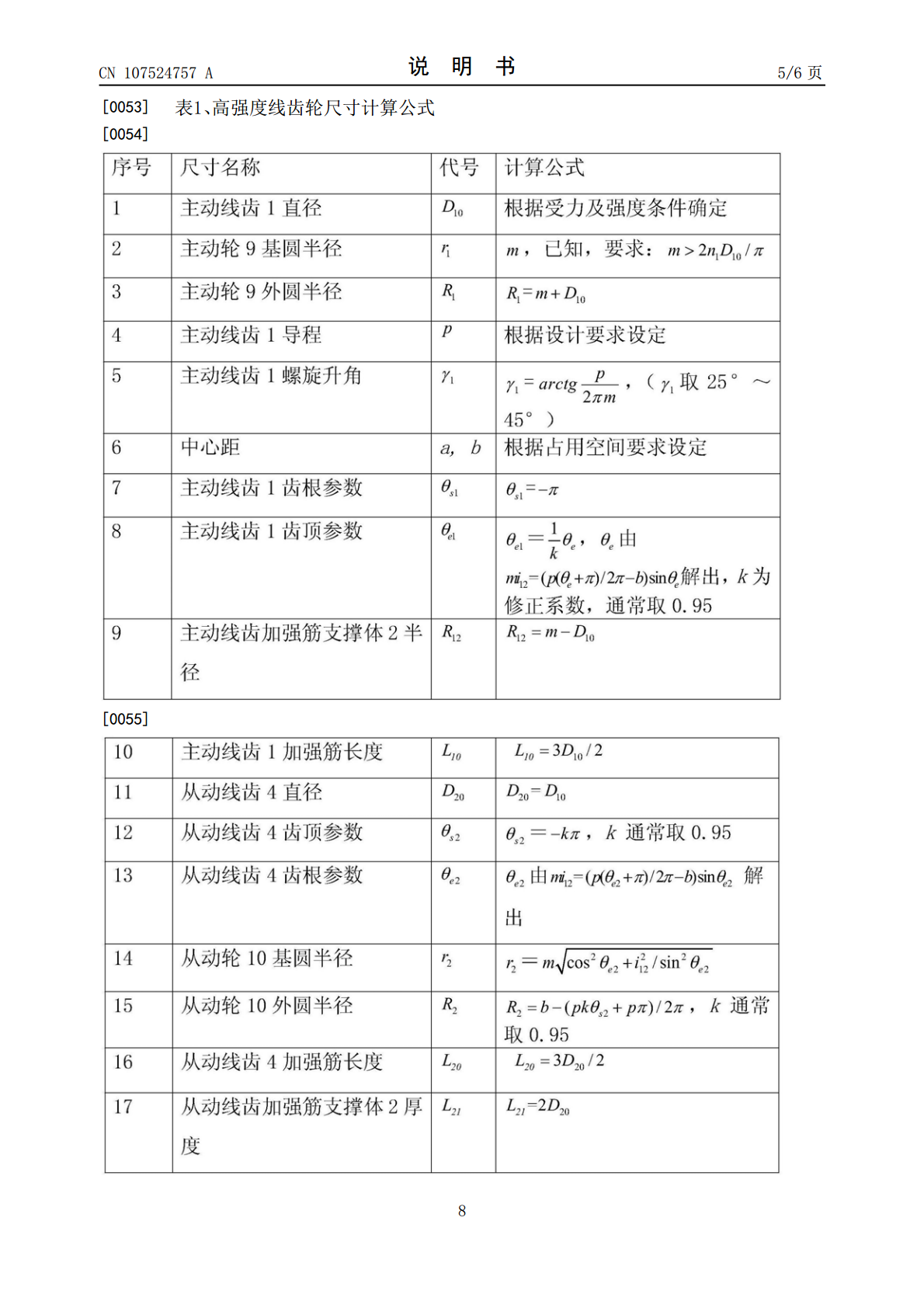
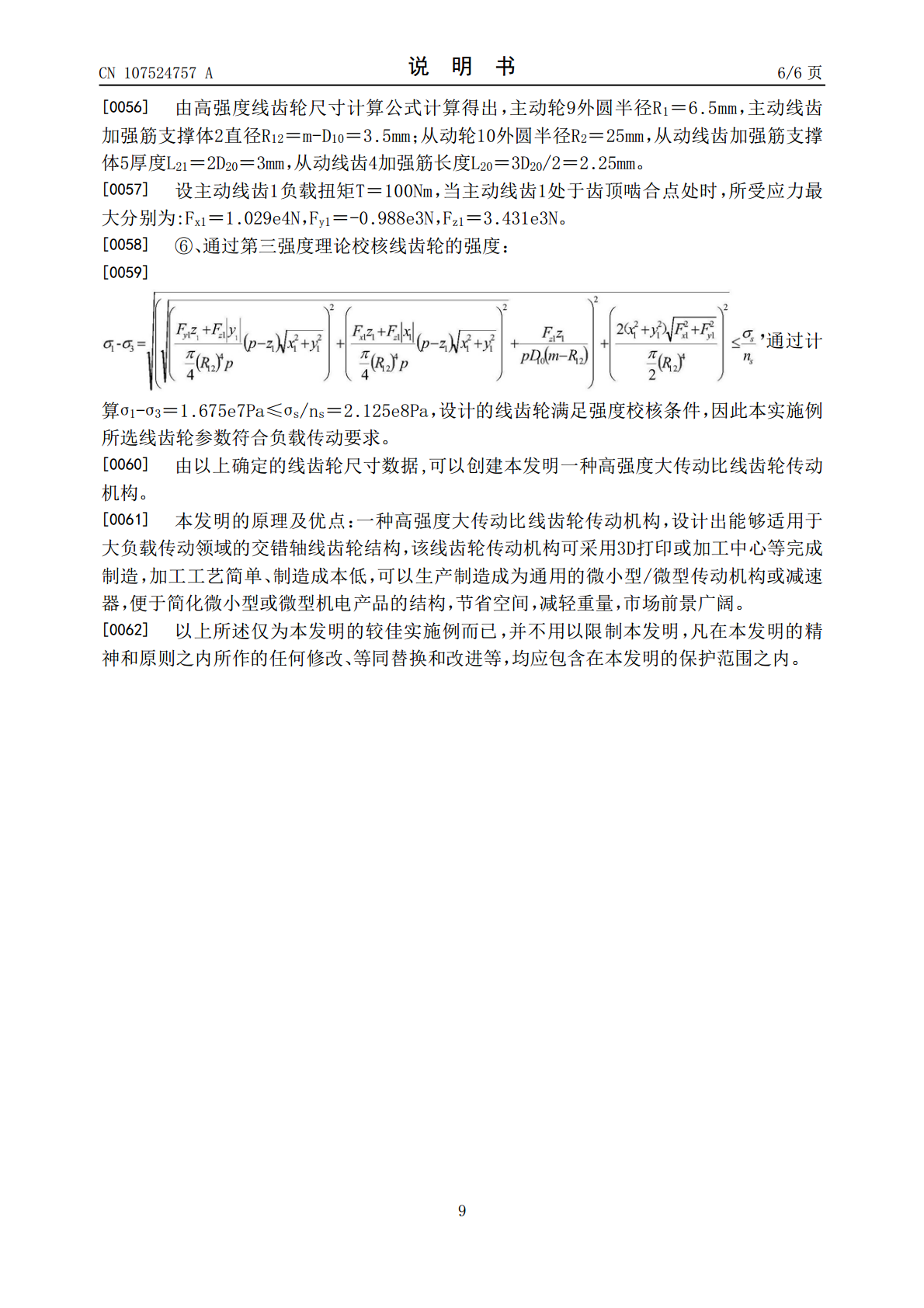
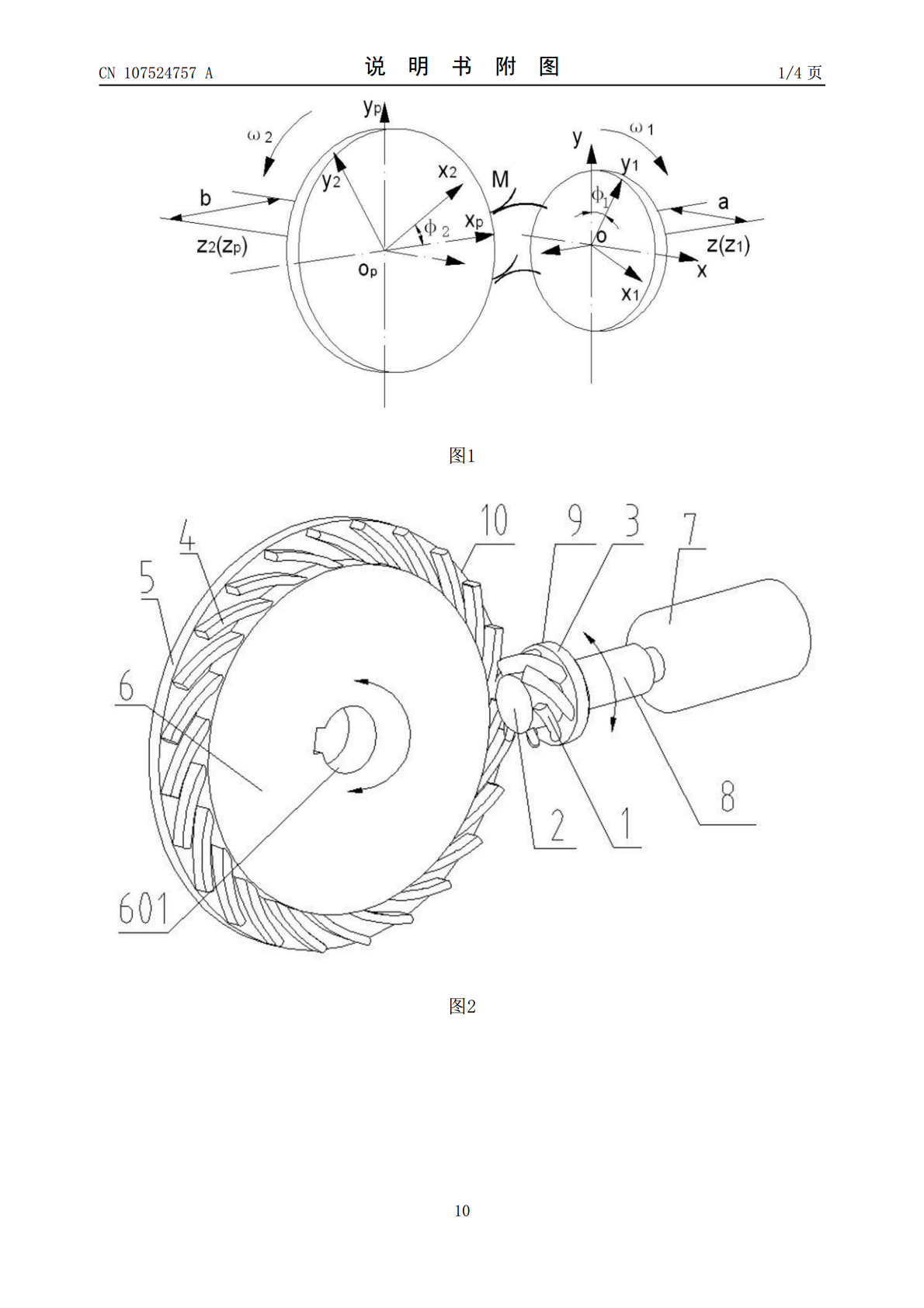
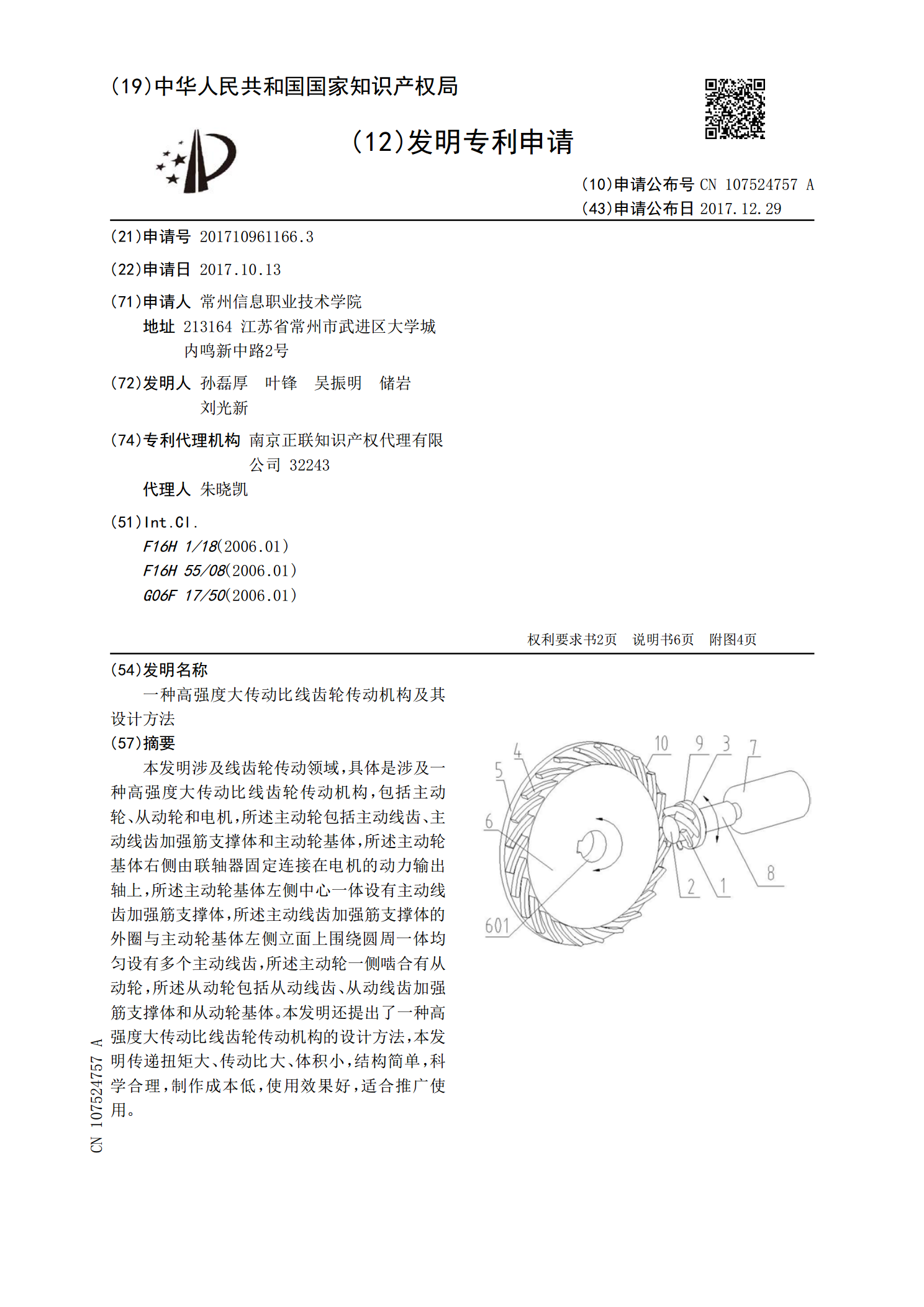
本发明涉及线齿轮传动领域,具体是涉及一种高强度大传动比线齿轮传动机构,包括主动轮、从动轮和电机,所述主动轮包括主动线齿、主动线齿加强筋支撑体和主动轮基体,所述主动轮基体右侧由联轴器固定连接在电机的动力输出轴上,所述主动轮基体左侧中心一体设有主动线齿加强筋支撑体,所述主动线齿加强筋支撑体的外圈与主动轮基体左侧立面上围绕圆周一体均匀设有多个主动线齿,所述主动轮一侧啮合有从动轮,所述从动轮包括从动线齿、从动线齿加强筋支撑体和从动轮基体。本发明还提出了一种高强度大传动比线齿轮传动机构的设计方法,本发明传递扭矩大、

一种变传动比线齿轮机构.pdf
本发明为一种变传动比线齿轮机构,该机构由任意角度相交轴的主动轮和从动轮组成传动副,传动由主动轮线齿和从动轮线齿之间的点接触啮合运动产生,线齿的接触线根据空间共轭曲线啮合理论设计,设计方程分为等传动比和变传动比两部分,等传动比部分提供匀速传动,变传动比部分使传动比平稳过渡。该线齿轮机构能够提供周期性变传动比传动,能够在从动轮的运动周期内提供多个传动比,并且各个传动比之间能进行符合运动规律的平稳过渡。

一种可变传动比的齿轮传动机构.pdf
本发明公开了一种可变传动比的齿轮传动机构,包括凹齿面齿轮、小齿轮,凹齿面齿轮和小齿轮相互啮合,小齿轮上有凸齿,凹齿面齿轮上有二圈以上的沿圆周方向均匀排列的与凸齿相配合的凹齿。本发明具有结构简单,易于实现,不需要复杂的设备,只要使小齿轮与凹齿面齿轮上不同的凹圈相啮合,就能实现变速。

3个行星齿轮传动比计算_行星齿轮机构传动比计算方法.docx
3个行星齿轮传动比计算_行星齿轮机构传动比计算方法行星齿轮传动速比计算方法综述杨桂香郭志强王明海杨珍(中国一拖集团有限公司,河南洛阳471039)摘要:以具有代表性的2K-H型行星齿轮传动为例,对行星齿轮传动速比常用的计算方法进行了介绍;分别用行星架固定法、力矩法、速度图解法等推导出2K-H型行星齿轮传动的特性方程;并对三种计算方法作简单对比,为行星齿轮传动设计和计算提供参考。关键词:行星齿轮传动;速比;计算方法中图分类号:U461.4文献标识码:A文章编号:Summaryofepicyclicgeart
一种可变传动比机构及可变传动比转向系统及其控制方法.pdf
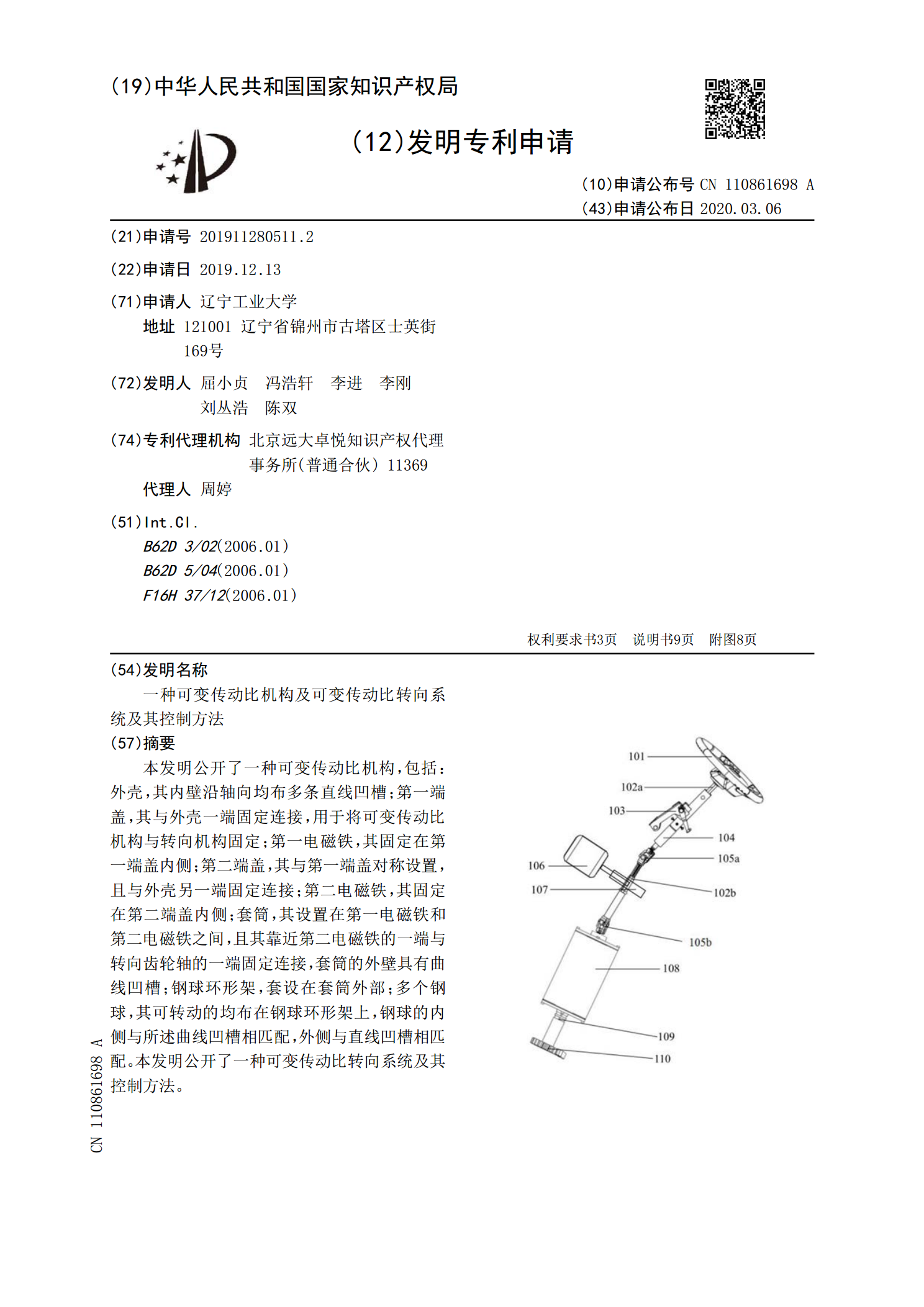
本发明公开了一种可变传动比机构,包括:外壳,其内壁沿轴向均布多条直线凹槽;第一端盖,其与外壳一端固定连接,用于将可变传动比机构与转向机构固定;第一电磁铁,其固定在第一端盖内侧;第二端盖,其与第一端盖对称设置,且与外壳另一端固定连接;第二电磁铁,其固定在第二端盖内侧;套筒,其设置在第一电磁铁和第二电磁铁之间,且其靠近第二电磁铁的一端与转向齿轮轴的一端固定连接,套筒的外壁具有曲线凹槽;钢球环形架,套设在套筒外部;多个钢球,其可转动的均布在钢球环形架上,钢球的内侧与所述曲线凹槽相匹配,外侧与直线凹槽相匹配。本发