
两维激光光路齿轮测量装置.pdf

是笛****加盟

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
两维激光光路齿轮测量装置.pdf
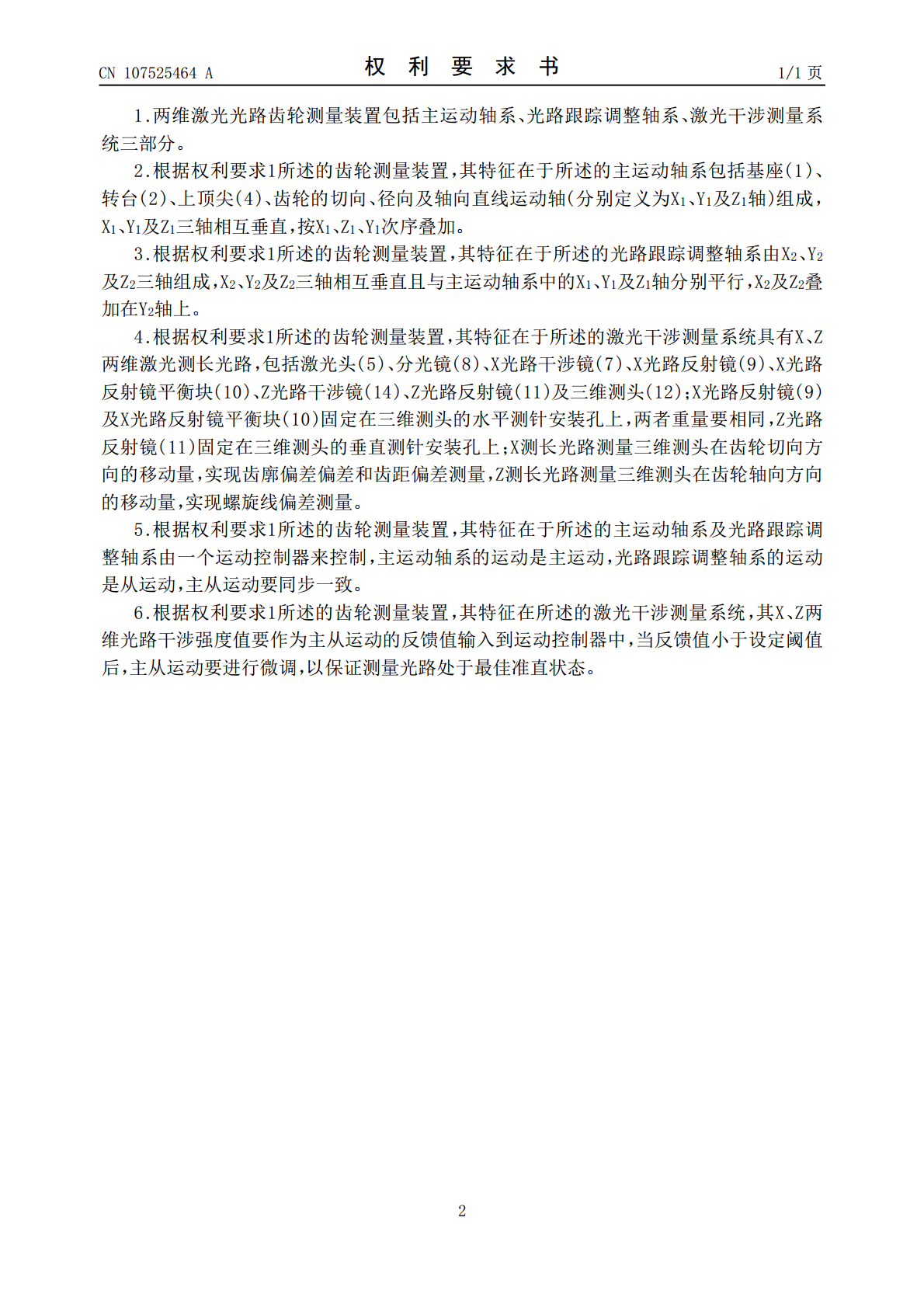
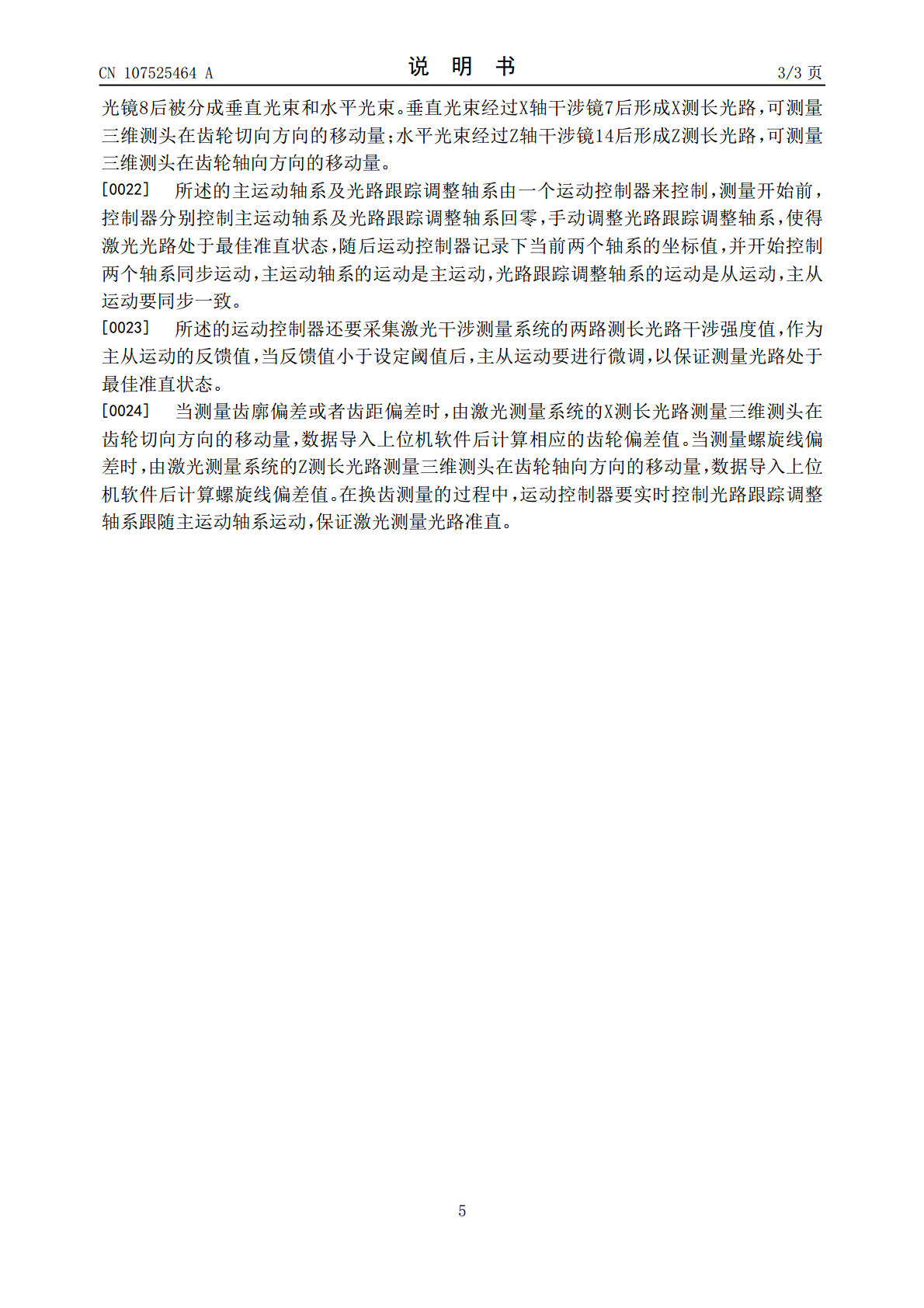
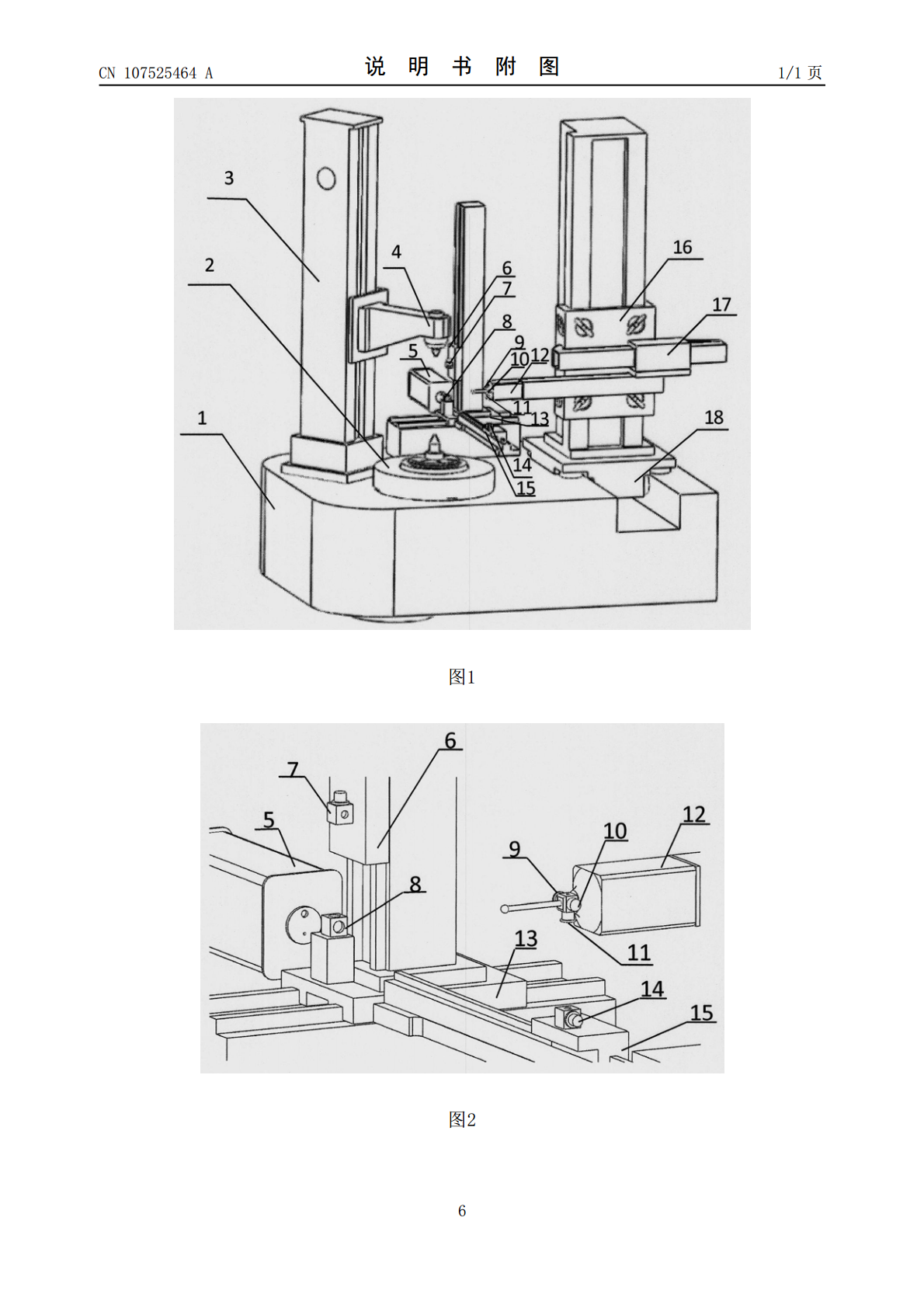
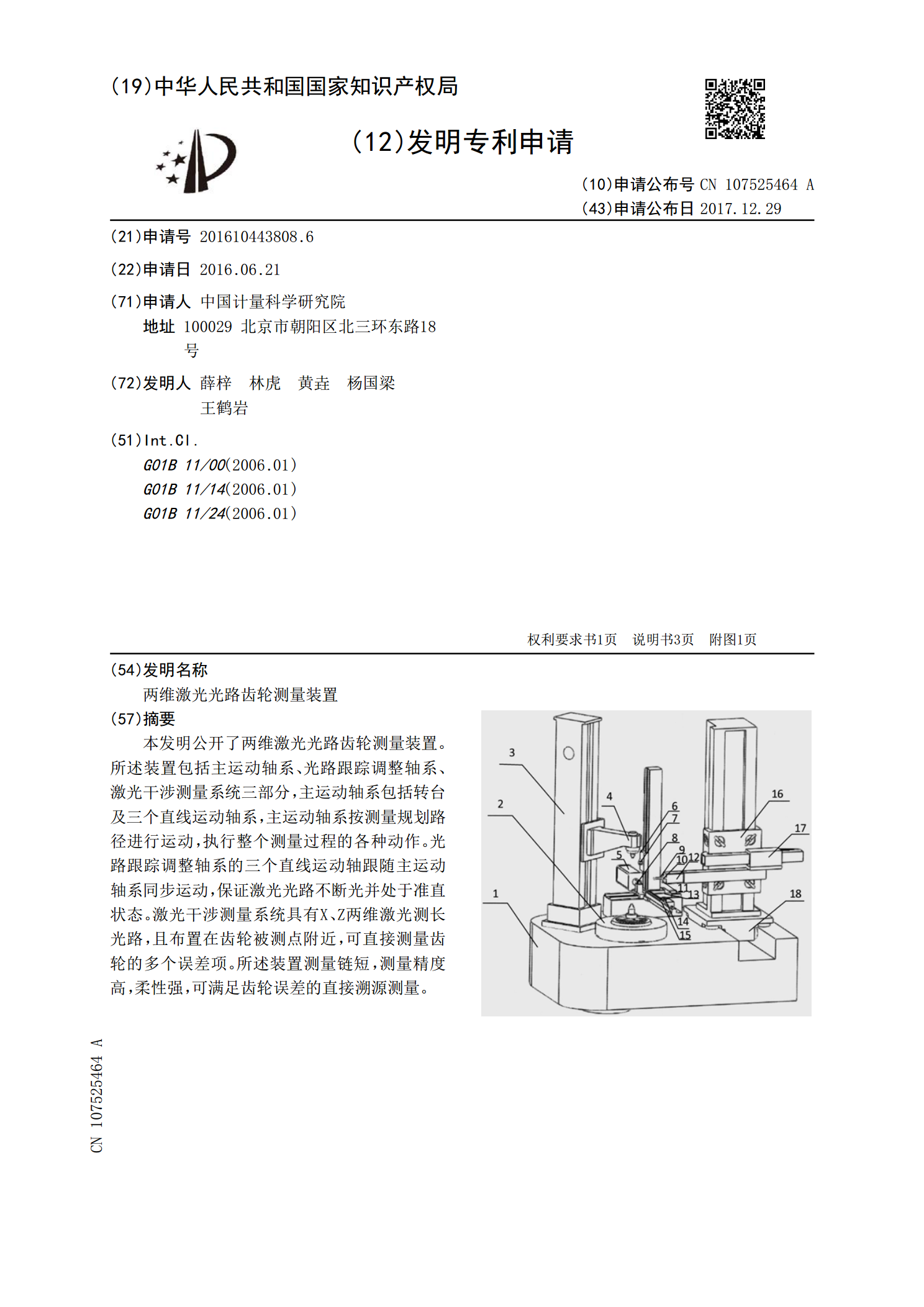
本发明公开了两维激光光路齿轮测量装置。所述装置包括主运动轴系、光路跟踪调整轴系、激光干涉测量系统三部分,主运动轴系包括转台及三个直线运动轴系,主运动轴系按测量规划路径进行运动,执行整个测量过程的各种动作。光路跟踪调整轴系的三个直线运动轴跟随主运动轴系同步运动,保证激光光路不断光并处于准直状态。激光干涉测量系统具有X、Z两维激光测长光路,且布置在齿轮被测点附近,可直接测量齿轮的多个误差项。所述装置测量链短,测量精度高,柔性强,可满足齿轮误差的直接溯源测量。

齿轮间隙测量装置.pdf
本发明涉及齿轮精度技术领域,公开了一种齿轮间隙测量装置,所述齿轮间隙测量装置用于测量至少包括啮合的第一齿轮和第二齿轮构成的齿轮副的齿轮间隙,所述齿轮间隙测量装置包括主体部和握持部,所述主体部(10)用于固定设置在第一齿轮上,所述主体部(10)上设置有读数表(11),所述握持部(21)通过弹性件(22)安装于所述主体部(10),所述握持部(21)上设置有用于在所述握持部(21)摆动时以带动与第一齿轮啮合的第二齿轮转动的连接件,其中所述读数表(11)的触头与所述握持部(21)相接触。本申请提供的测量装置使用方
齿轮间隙测量装置.pdf
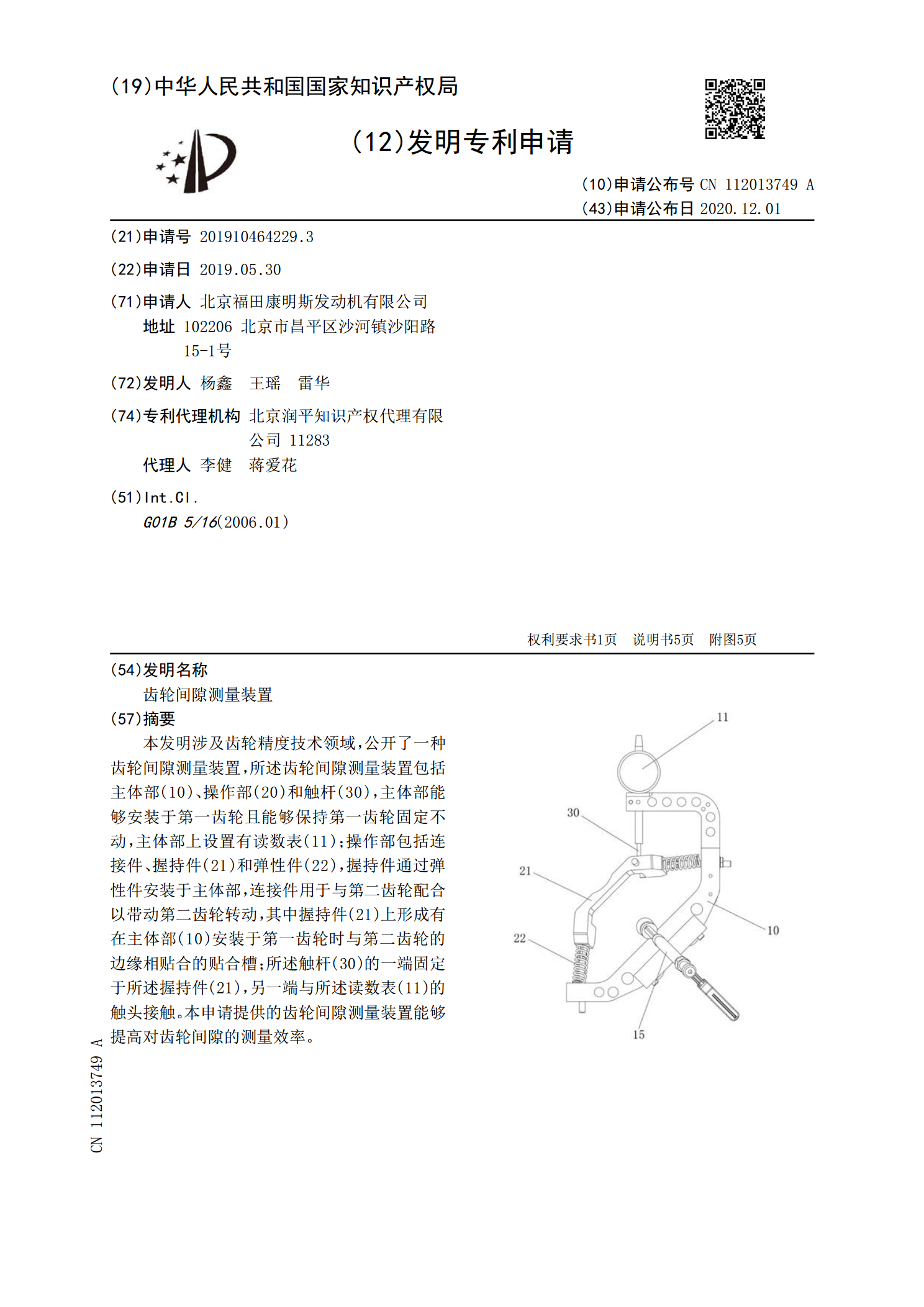
本发明涉及齿轮精度技术领域,公开了一种齿轮间隙测量装置,所述齿轮间隙测量装置包括主体部(10)、操作部(20)和触杆(30),主体部能够安装于第一齿轮且能够保持第一齿轮固定不动,主体部上设置有读数表(11);操作部包括连接件、握持件(21)和弹性件(22),握持件通过弹性件安装于主体部,连接件用于与第二齿轮配合以带动第二齿轮转动,其中握持件(21)上形成有在主体部(10)安装于第一齿轮时与第二齿轮的边缘相贴合的贴合槽;所述触杆(30)的一端固定于所述握持件(21),另一端与所述读数表(11)的触头接触。本
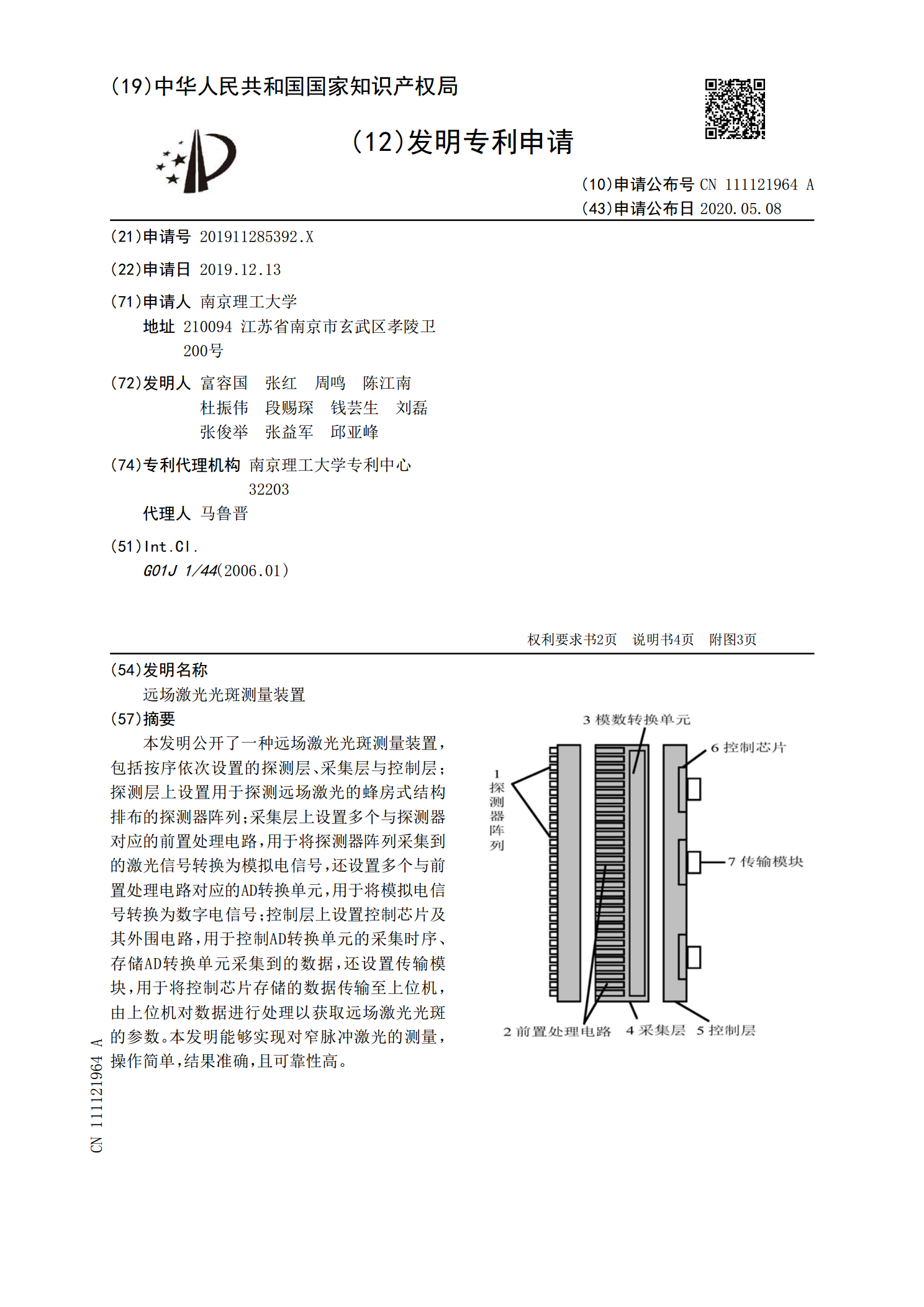
远场激光光斑测量装置.pdf
本发明公开了一种远场激光光斑测量装置,包括按序依次设置的探测层、采集层与控制层;探测层上设置用于探测远场激光的蜂房式结构排布的探测器阵列;采集层上设置多个与探测器对应的前置处理电路,用于将探测器阵列采集到的激光信号转换为模拟电信号,还设置多个与前置处理电路对应的AD转换单元,用于将模拟电信号转换为数字电信号;控制层上设置控制芯片及其外围电路,用于控制AD转换单元的采集时序、存储AD转换单元采集到的数据,还设置传输模块,用于将控制芯片存储的数据传输至上位机,由上位机对数据进行处理以获取远场激光光斑的参数。本
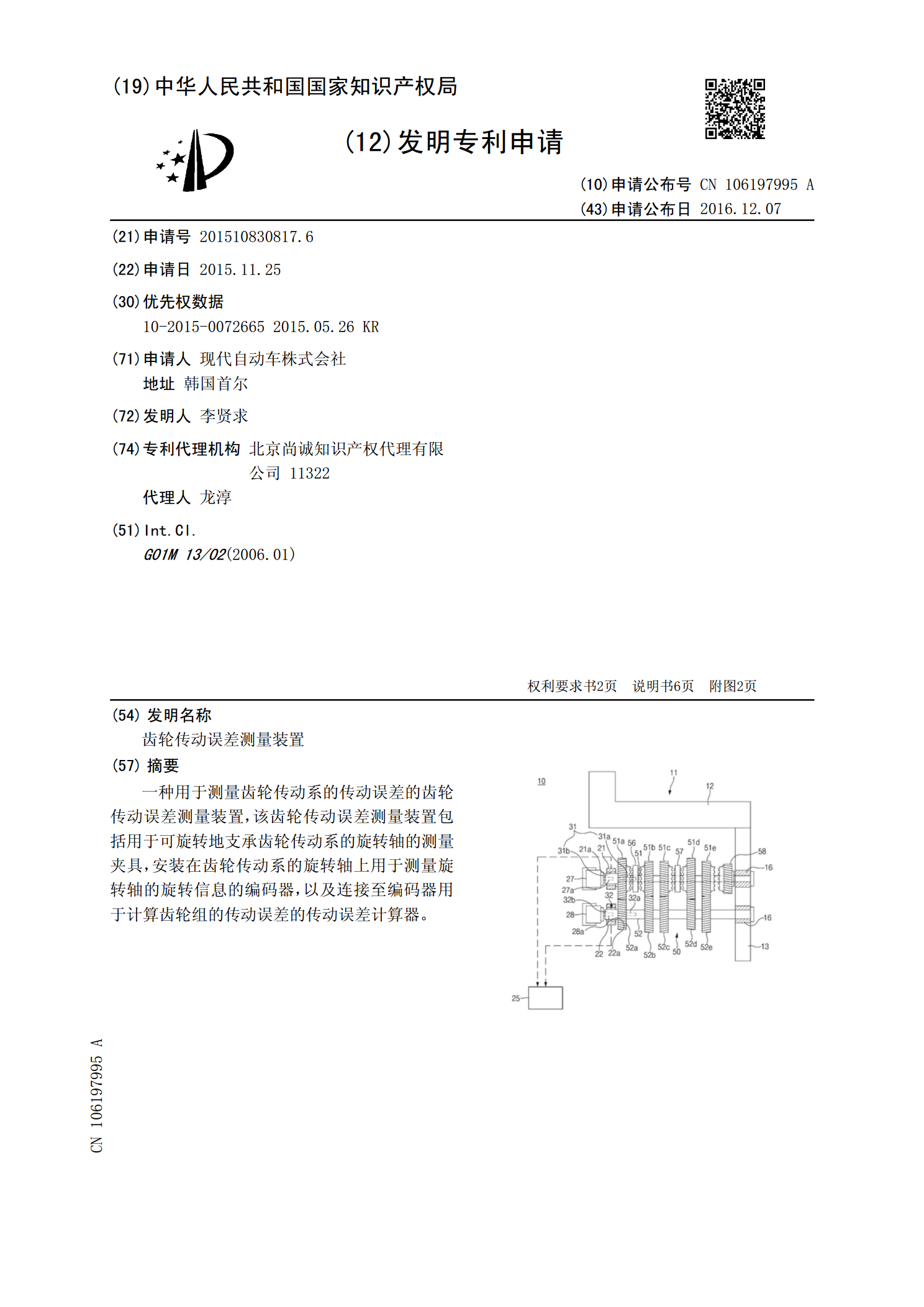
齿轮传动误差测量装置.pdf
一种用于测量齿轮传动系的传动误差的齿轮传动误差测量装置,该齿轮传动误差测量装置包括用于可旋转地支承齿轮传动系的旋转轴的测量夹具,安装在齿轮传动系的旋转轴上用于测量旋转轴的旋转信息的编码器,以及连接至编码器用于计算齿轮组的传动误差的传动误差计算器。