
汽车及其电子差速控制方法和控制装置.pdf

Ma****57


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
汽车及其电子差速控制方法和控制装置.pdf
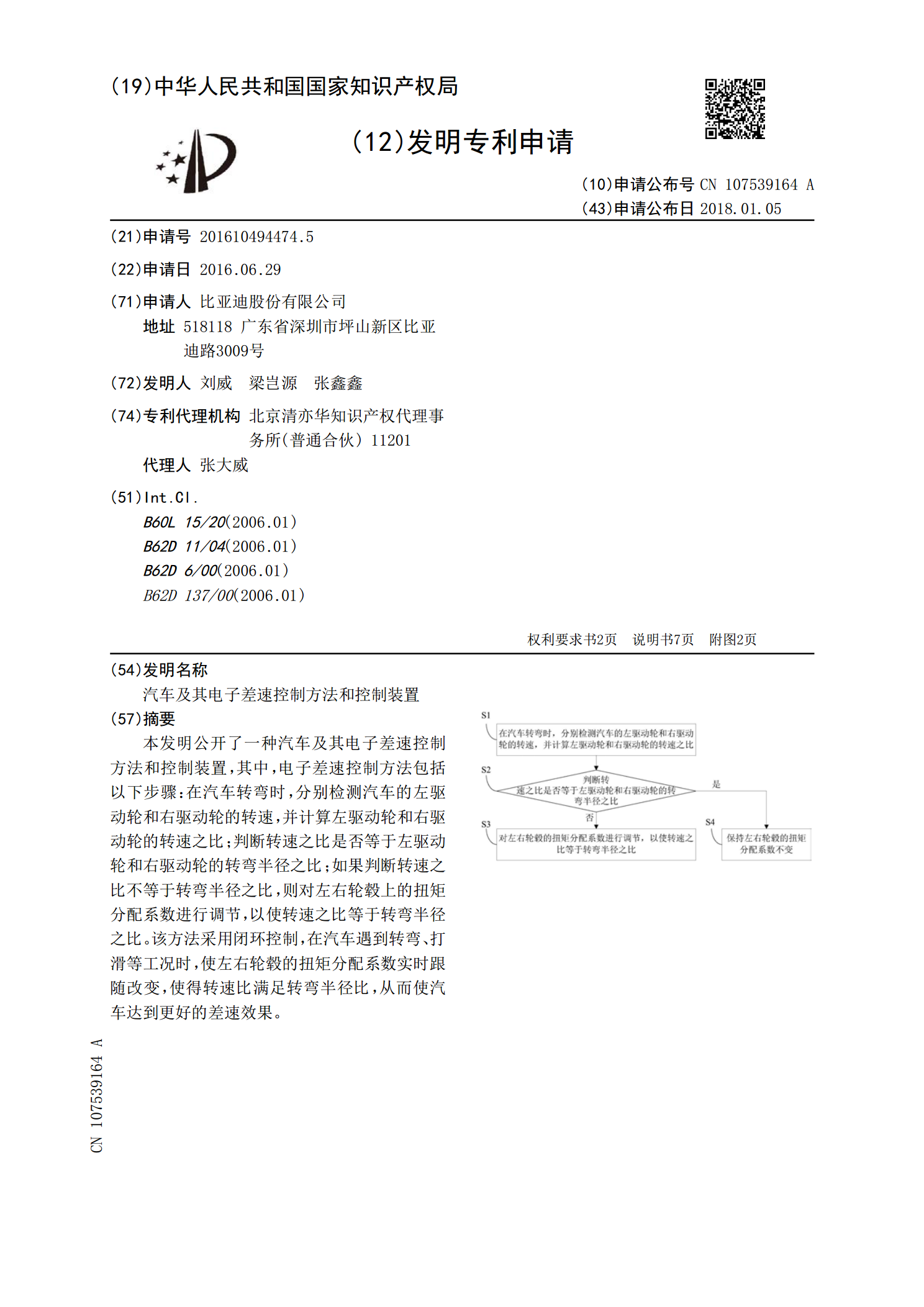
本发明公开了一种汽车及其电子差速控制方法和控制装置,其中,电子差速控制方法包括以下步骤:在汽车转弯时,分别检测汽车的左驱动轮和右驱动轮的转速,并计算左驱动轮和右驱动轮的转速之比;判断转速之比是否等于左驱动轮和右驱动轮的转弯半径之比;如果判断转速之比不等于转弯半径之比,则对左右轮毂上的扭矩分配系数进行调节,以使转速之比等于转弯半径之比。该方法采用闭环控制,在汽车遇到转弯、打滑等工况时,使左右轮毂的扭矩分配系数实时跟随改变,使得转速比满足转弯半径比,从而使汽车达到更好的差速效果。
差速锁控制方法和装置.pdf
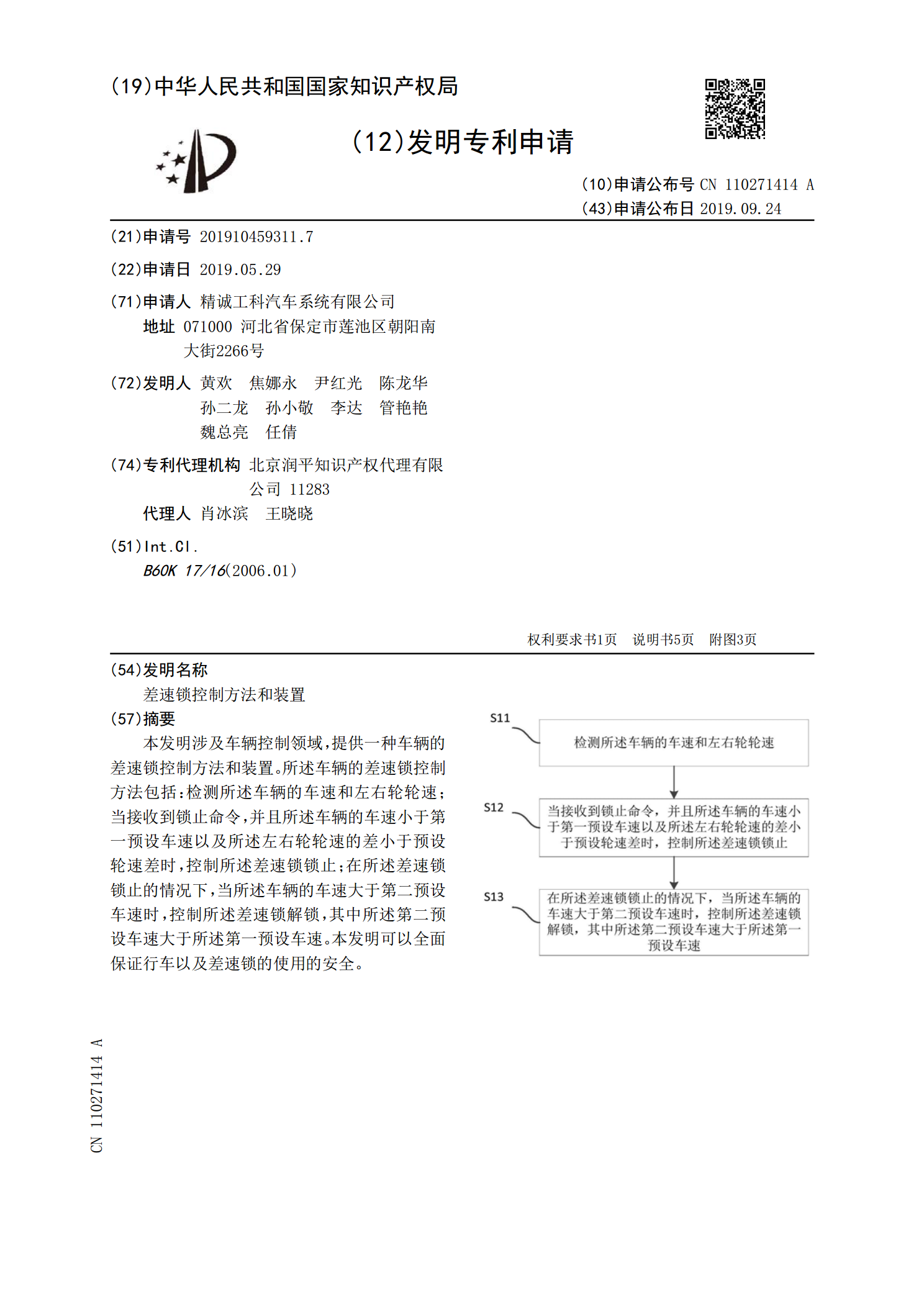
本发明涉及车辆控制领域,提供一种车辆的差速锁控制方法和装置。所述车辆的差速锁控制方法包括:检测所述车辆的车速和左右轮轮速;当接收到锁止命令,并且所述车辆的车速小于第一预设车速以及所述左右轮轮速的差小于预设轮速差时,控制所述差速锁锁止;在所述差速锁锁止的情况下,当所述车辆的车速大于第二预设车速时,控制所述差速锁解锁,其中所述第二预设车速大于所述第一预设车速。本发明可以全面保证行车以及差速锁的使用的安全。
一种电子限滑差速装置及其控制方法.pdf
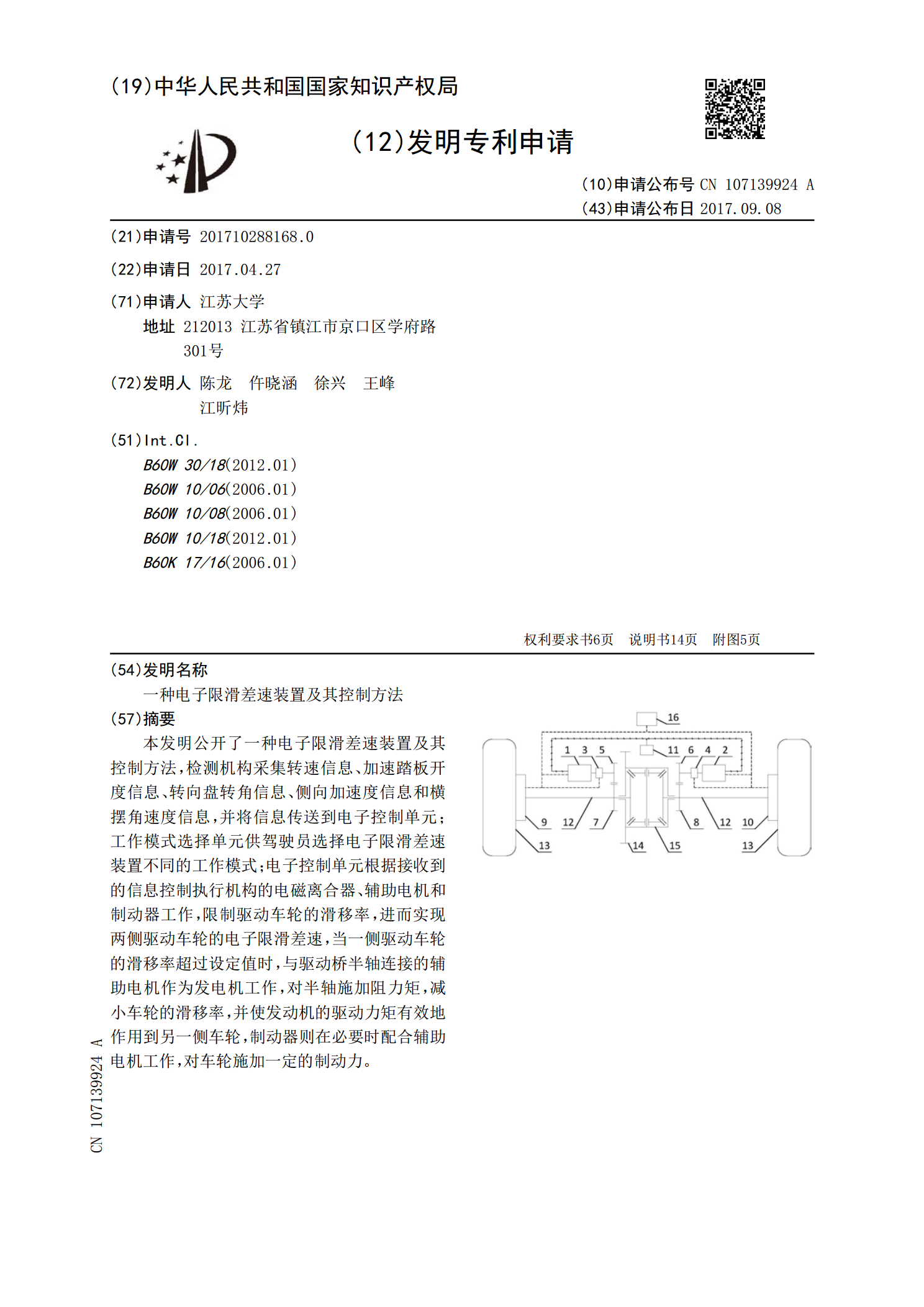
本发明公开了一种电子限滑差速装置及其控制方法,检测机构采集转速信息、加速踏板开度信息、转向盘转角信息、侧向加速度信息和横摆角速度信息,并将信息传送到电子控制单元;工作模式选择单元供驾驶员选择电子限滑差速装置不同的工作模式;电子控制单元根据接收到的信息控制执行机构的电磁离合器、辅助电机和制动器工作,限制驱动车轮的滑移率,进而实现两侧驱动车轮的电子限滑差速,当一侧驱动车轮的滑移率超过设定值时,与驱动桥半轴连接的辅助电机作为发电机工作,对半轴施加阻力矩,减小车轮的滑移率,并使发动机的驱动力矩有效地作用到另一侧车
轮边驱动转向差速控制方法、控制装置、设备及汽车.pdf
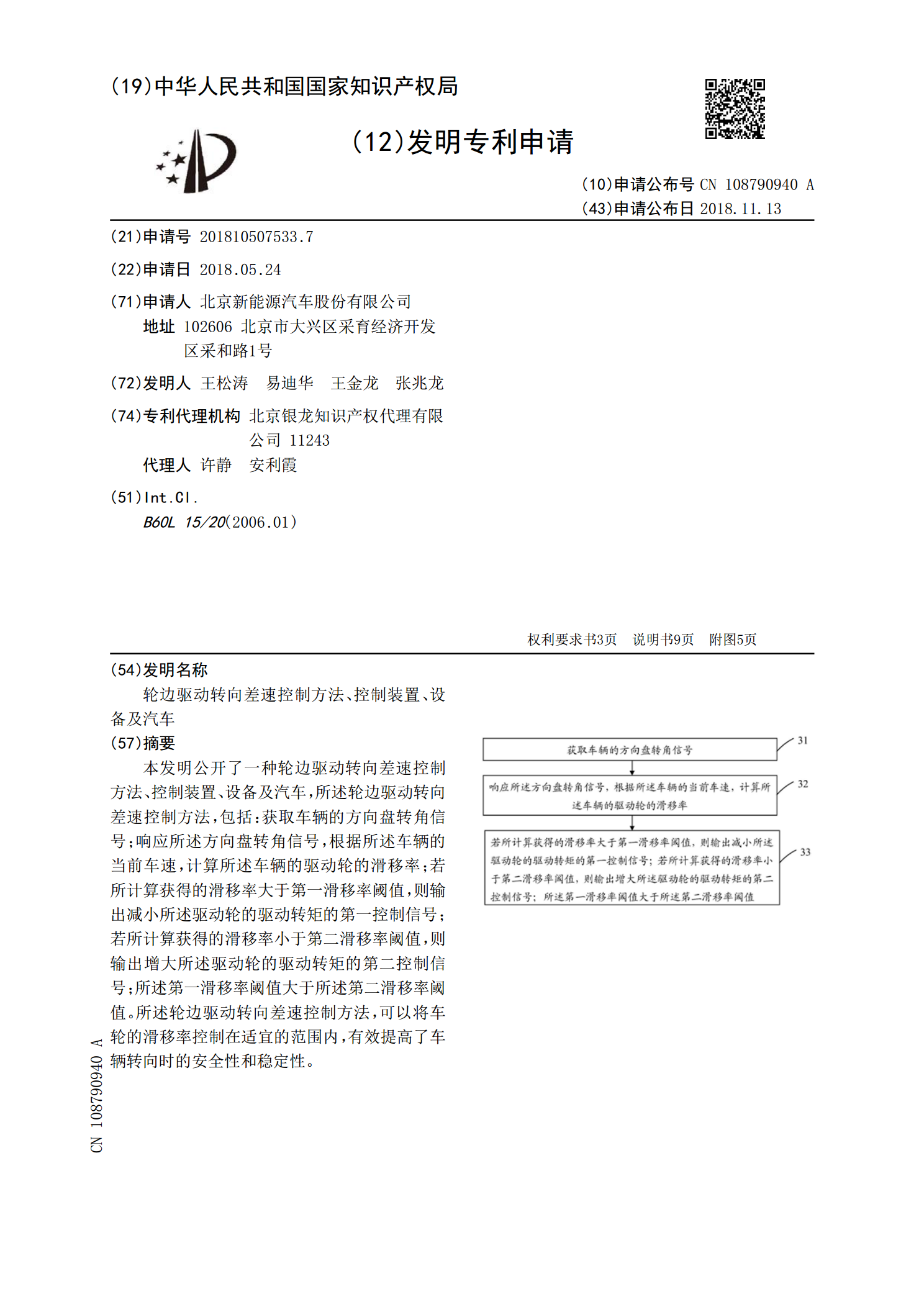
本发明公开了一种轮边驱动转向差速控制方法、控制装置、设备及汽车,所述轮边驱动转向差速控制方法,包括:获取车辆的方向盘转角信号;响应所述方向盘转角信号,根据所述车辆的当前车速,计算所述车辆的驱动轮的滑移率;若所计算获得的滑移率大于第一滑移率阈值,则输出减小所述驱动轮的驱动转矩的第一控制信号;若所计算获得的滑移率小于第二滑移率阈值,则输出增大所述驱动轮的驱动转矩的第二控制信号;所述第一滑移率阈值大于所述第二滑移率阈值。所述轮边驱动转向差速控制方法,可以将车轮的滑移率控制在适宜的范围内,有效提高了车辆转向时的安

电动汽车电子差速控制策略研究.pptx
电动汽车电子差速控制策略研究目录添加章节标题电动汽车电子差速控制策略概述电子差速控制的定义和作用电子差速控制系统的基本组成电子差速控制策略的研究意义电动汽车电子差速控制策略研究现状国内外研究现状及发展趋势现有电子差速控制策略的优缺点分析现有电子差速控制策略的实验验证及实际应用情况电动汽车电子差速控制策略设计方法基于数学模型的差速控制策略设计基于模糊逻辑的差速控制策略设计基于滑模控制的差速控制策略设计基于最优控制的差速控制策略设计电动汽车电子差速控制策略优化方法基于遗传算法的差速控制策略优化基于粒子群算法的