
轮边驱动转向差速控制方法、控制装置、设备及汽车.pdf

一吃****春晓

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮边驱动转向差速控制方法、控制装置、设备及汽车.pdf
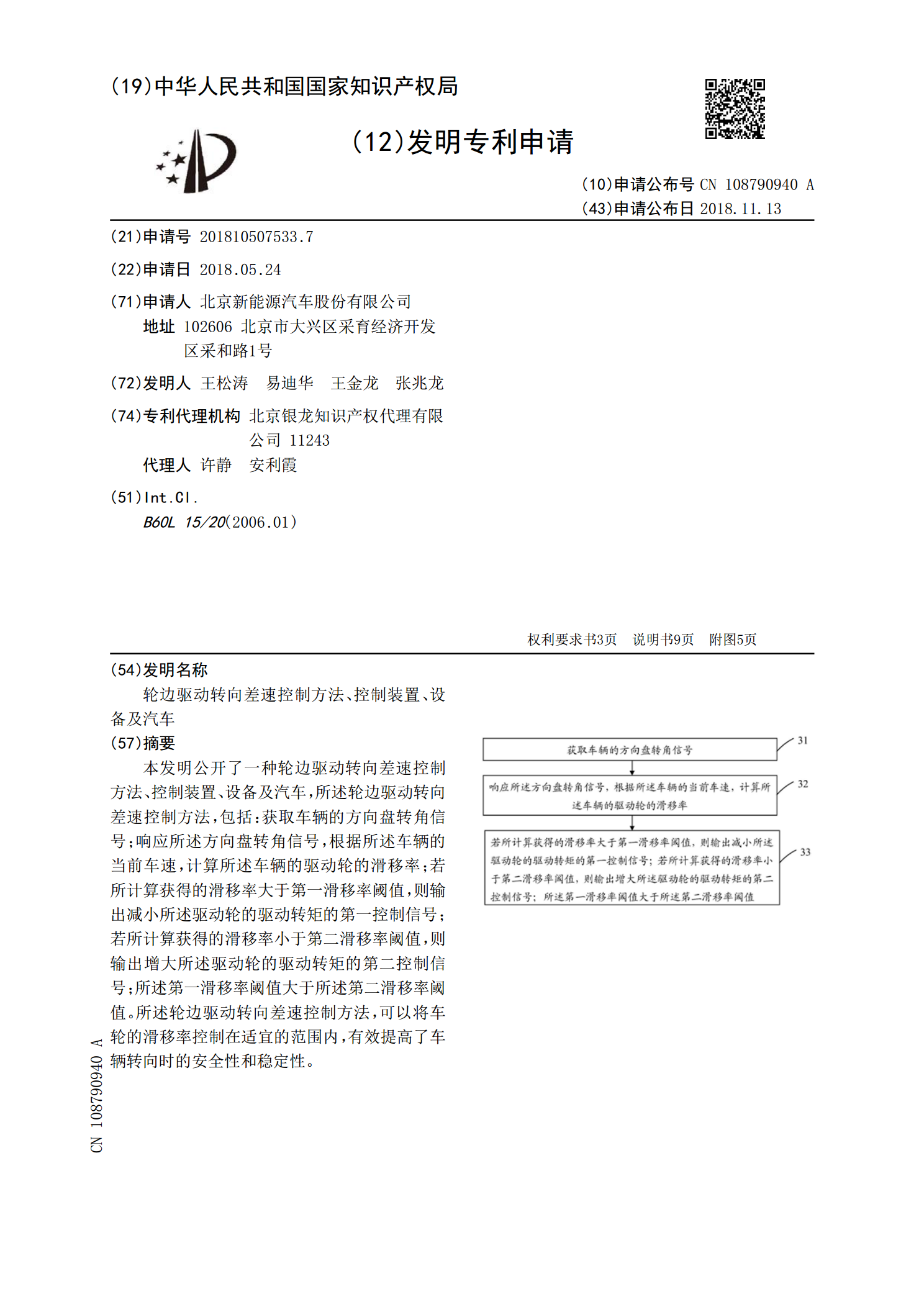
本发明公开了一种轮边驱动转向差速控制方法、控制装置、设备及汽车,所述轮边驱动转向差速控制方法,包括:获取车辆的方向盘转角信号;响应所述方向盘转角信号,根据所述车辆的当前车速,计算所述车辆的驱动轮的滑移率;若所计算获得的滑移率大于第一滑移率阈值,则输出减小所述驱动轮的驱动转矩的第一控制信号;若所计算获得的滑移率小于第二滑移率阈值,则输出增大所述驱动轮的驱动转矩的第二控制信号;所述第一滑移率阈值大于所述第二滑移率阈值。所述轮边驱动转向差速控制方法,可以将车轮的滑移率控制在适宜的范围内,有效提高了车辆转向时的安

四轮驱动四轮转向的汽车电子差速转向控制.docx
四轮驱动四轮转向的汽车电子差速转向控制-论文网论文摘要:通过汽车转向时稳定性分析阐明了四轮转向的优点。而鉴于轮毂电机在电动汽车上应用的诸多优点,及其功率受结构体积的限制,轮毂电机的应用将使汽车由性能更好的四轮驱动替代两轮驱动,它不但充分利用了地面对车轮的附着力和驱动力,而且结合用直线步进电机控制转向力的汽车转向系统,能更容易地实现全面改善转向性能的四轮转向系统。由于四轮驱动4WD与四轮转向4WS相结合的电子差速计算理论还有待完善,通过对轮毂电机运行的电子差速转向控制原理分析和数学推导,提出了4WD-4WS

四轮驱动四轮转向的汽车电子差速转向控制论文.docx
四轮驱动四轮转向的汽车电子差速转向控制论文论文摘要:通过汽车转向时稳定性分析阐明了四轮转向的优点。而鉴于轮毂电机在电动汽车上应用的诸多优点,及其功率受结构体积的限制,轮毂电机的应用将使汽车由性能更好的四轮驱动替代两轮驱动,它不但充分利用了地面对车轮的附着力和驱动力,而且结合用直线步进电机控制转向力的汽车转向系统,能更容易地实现全面改善转向性能的四轮转向系统。由于四轮驱动4WD与四轮转向4WS相结合的电子差速计算理论还有待完善,通过对轮毂电机运行的电子差速转向控制原理分析和数学推导,提出了4WD-4WS相结

具备独立转向和轮边驱动的汽车单轮装置及控制方法.pdf
本发明涉及一种具备独立转向和轮边驱动的汽车单轮装置及控制方法。汽车单轮装置包括转向电机、转向架、轮边驱动电机和汽车单轮,转向电机安装在汽车车架底盘上,转向架设在汽车车架底盘的下方,转向架的外端设有法兰盘,转向电机的输出轴和法兰盘相连,轮边驱动电机安装在转向架的内端的下方,轮边驱动电机的输出轴和汽车单轮之间连接有传动机构。控制方法为:每个汽车单轮的驱动受各自的轮边驱动电机独立控制,每个汽车单轮的转向受各自的转向电机独立控制,使汽车实现蟹行、原地转向及斜行行驶。本发明能精确控制每个车轮的驱动力,灵活调整每个车
四轮驱动电动汽车电子差速控制方法及系统.pdf
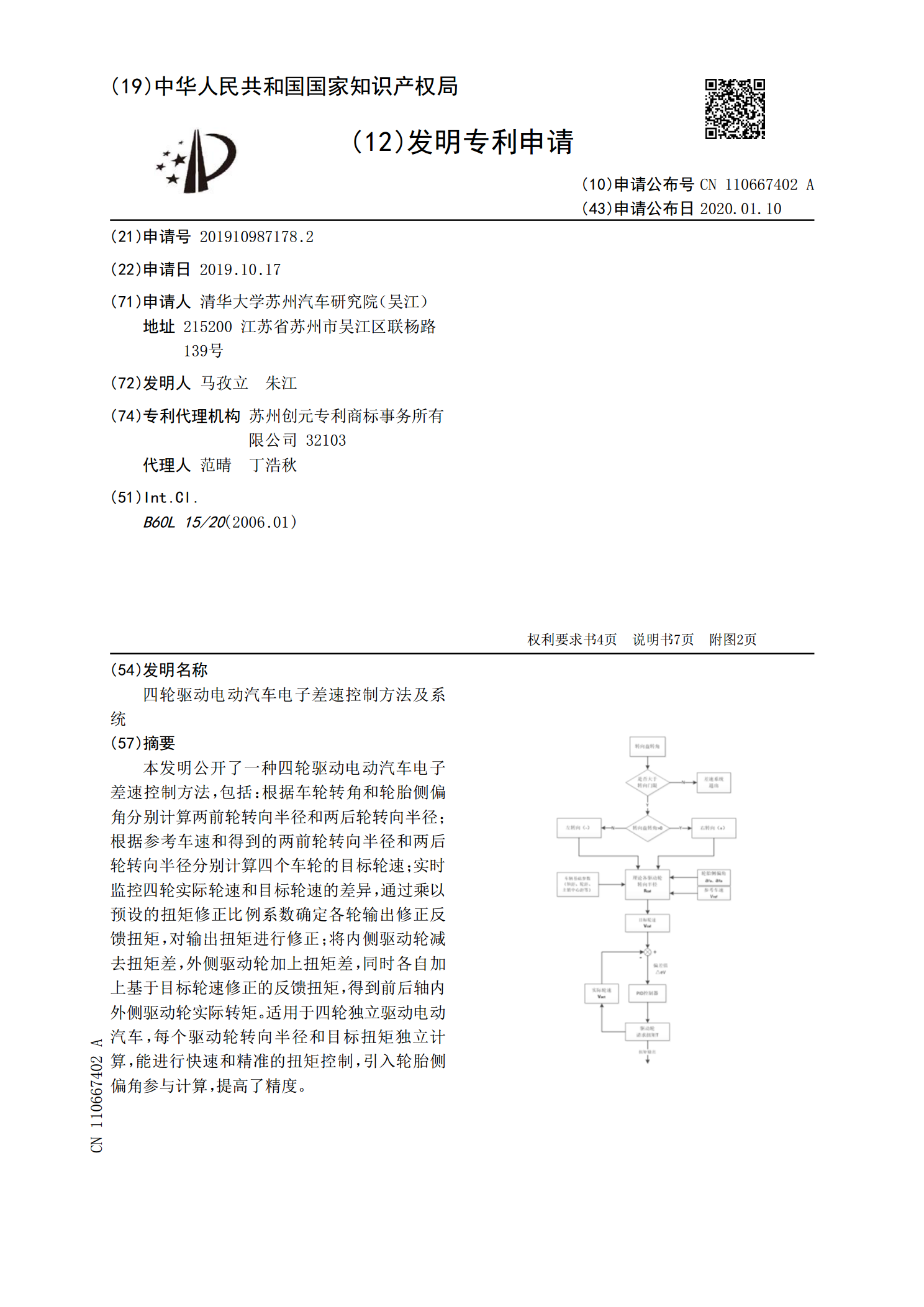
本发明公开了一种四轮驱动电动汽车电子差速控制方法,包括:根据车轮转角和轮胎侧偏角分别计算两前轮转向半径和两后轮转向半径;根据参考车速和得到的两前轮转向半径和两后轮转向半径分别计算四个车轮的目标轮速;实时监控四轮实际轮速和目标轮速的差异,通过乘以预设的扭矩修正比例系数确定各轮输出修正反馈扭矩,对输出扭矩进行修正;将内侧驱动轮减去扭矩差,外侧驱动轮加上扭矩差,同时各自加上基于目标轮速修正的反馈扭矩,得到前后轴内外侧驱动轮实际转矩。适用于四轮独立驱动电动汽车,每个驱动轮转向半径和目标扭矩独立计算,能进行快速和精