
具少齿差减速机构的行星减速器.pdf

论文****酱吖

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
具少齿差减速机构的行星减速器.pdf
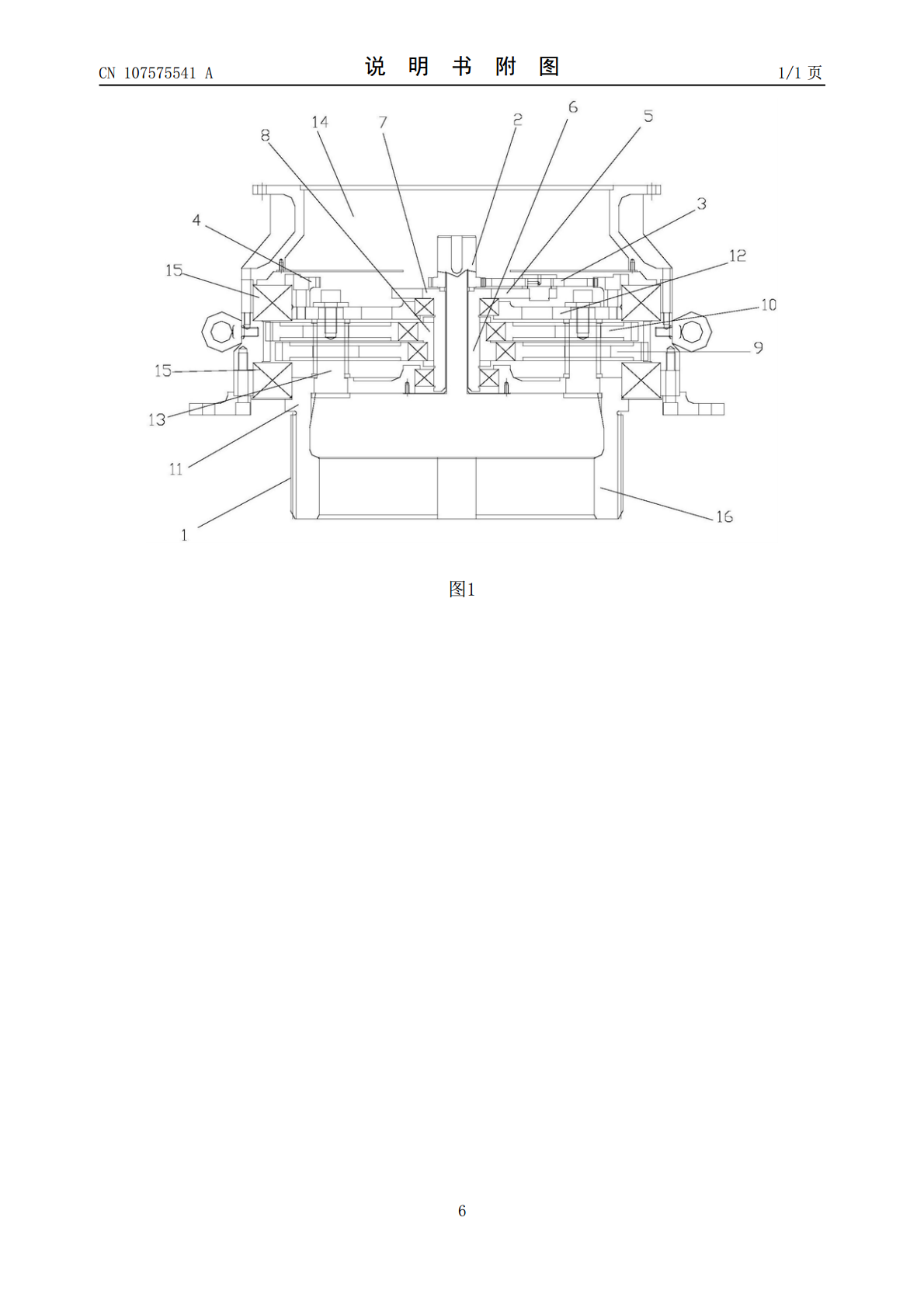
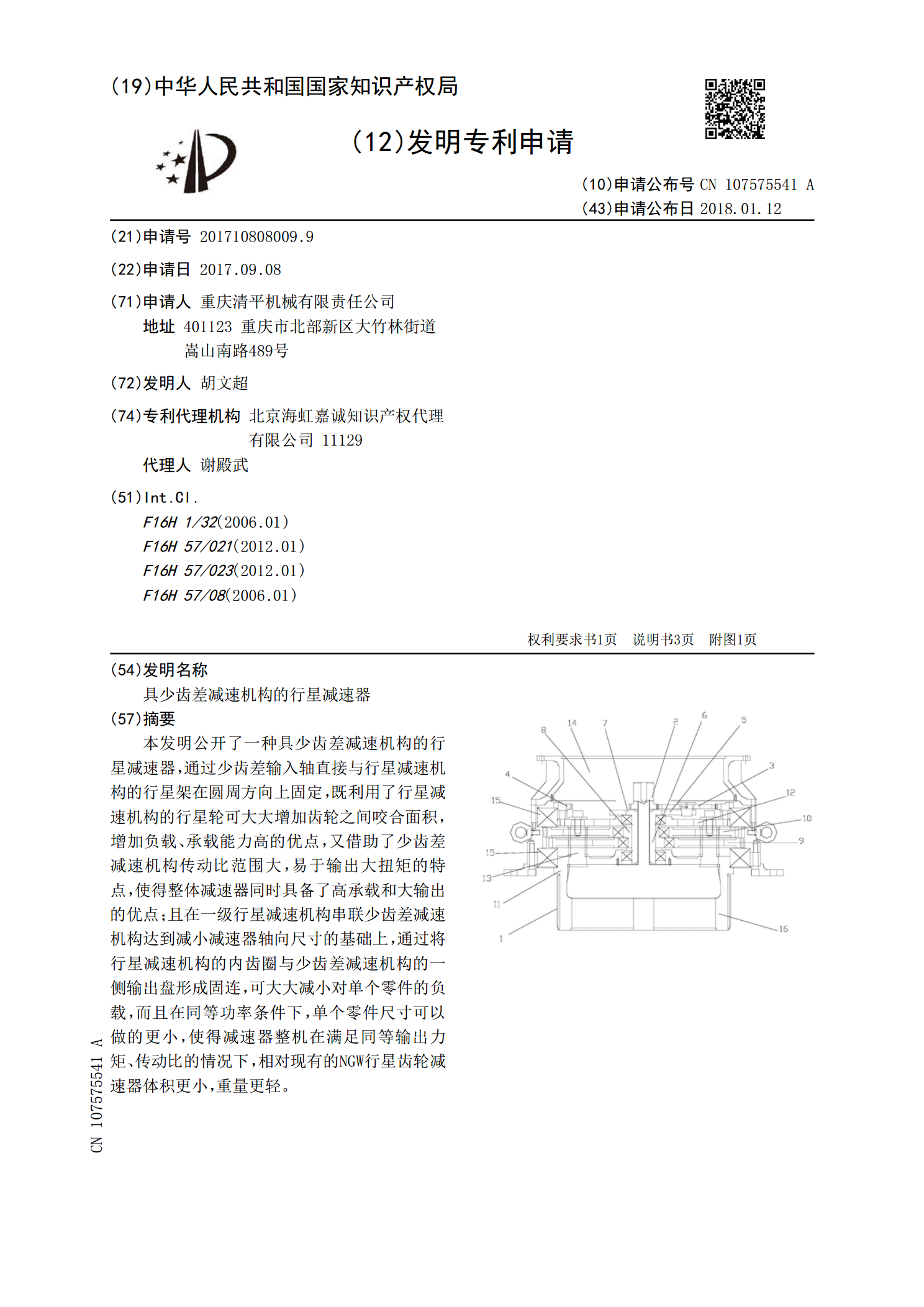
本发明公开了一种具少齿差减速机构的行星减速器,通过少齿差输入轴直接与行星减速机构的行星架在圆周方向上固定,既利用了行星减速机构的行星轮可大大增加齿轮之间咬合面积,增加负载、承载能力高的优点,又借助了少齿差减速机构传动比范围大,易于输出大扭矩的特点,使得整体减速器同时具备了高承载和大输出的优点;且在一级行星减速机构串联少齿差减速机构达到减小减速器轴向尺寸的基础上,通过将行星减速机构的内齿圈与少齿差减速机构的一侧输出盘形成固连,可大大减小对单个零件的负载,而且在同等功率条件下,单个零件尺寸可以做的更小,使得减

少齿差行星减速器.pdf
本发明公开了一种少齿差行星减速器,包括壳体、与壳体转动配合的动力输入轴和动力输出盘,动力输入轴上在圆周方向固定配合设置太阳轮,与太阳轮啮合设置至少两个行星轮,行星轮的行星轮轴设置偏心套;与壳体上的固定针齿少齿差啮合设置摆线轮;每个偏心套分别沿轴向穿过摆线轮与其转动配合,行星轮轴端部沿轴向穿入动力输出盘并与其在圆周方向转动配合,摆线轮的齿廓由针齿作一次包络运动形成,内齿轮的齿廓为由摆线轮作二次包络运动形成;本发明既具有普通摆线针轮行星传动的多齿啮合的特性,而且具有双线接触特性,二次包络接触点诱导法曲率趋于零
少齿差行星减速器.pdf
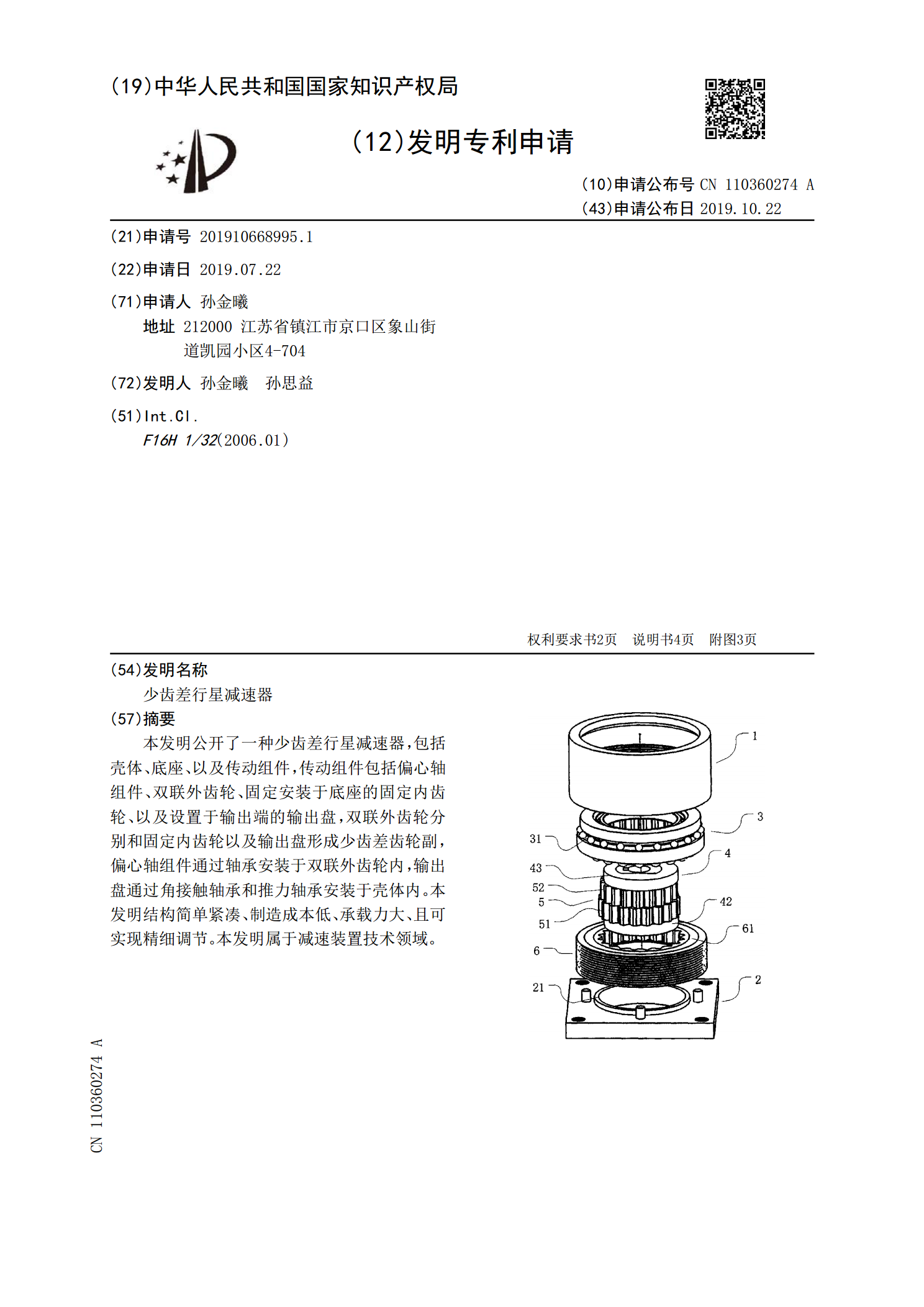
本发明公开了一种少齿差行星减速器,包括壳体、底座、以及传动组件,传动组件包括偏心轴组件、双联外齿轮、固定安装于底座的固定内齿轮、以及设置于输出端的输出盘,双联外齿轮分别和固定内齿轮以及输出盘形成少齿差齿轮副,偏心轴组件通过轴承安装于双联外齿轮内,输出盘通过角接触轴承和推力轴承安装于壳体内。本发明结构简单紧凑、制造成本低、承载力大、且可实现精细调节。本发明属于减速装置技术领域。
少齿差行星传动减速器.pdf
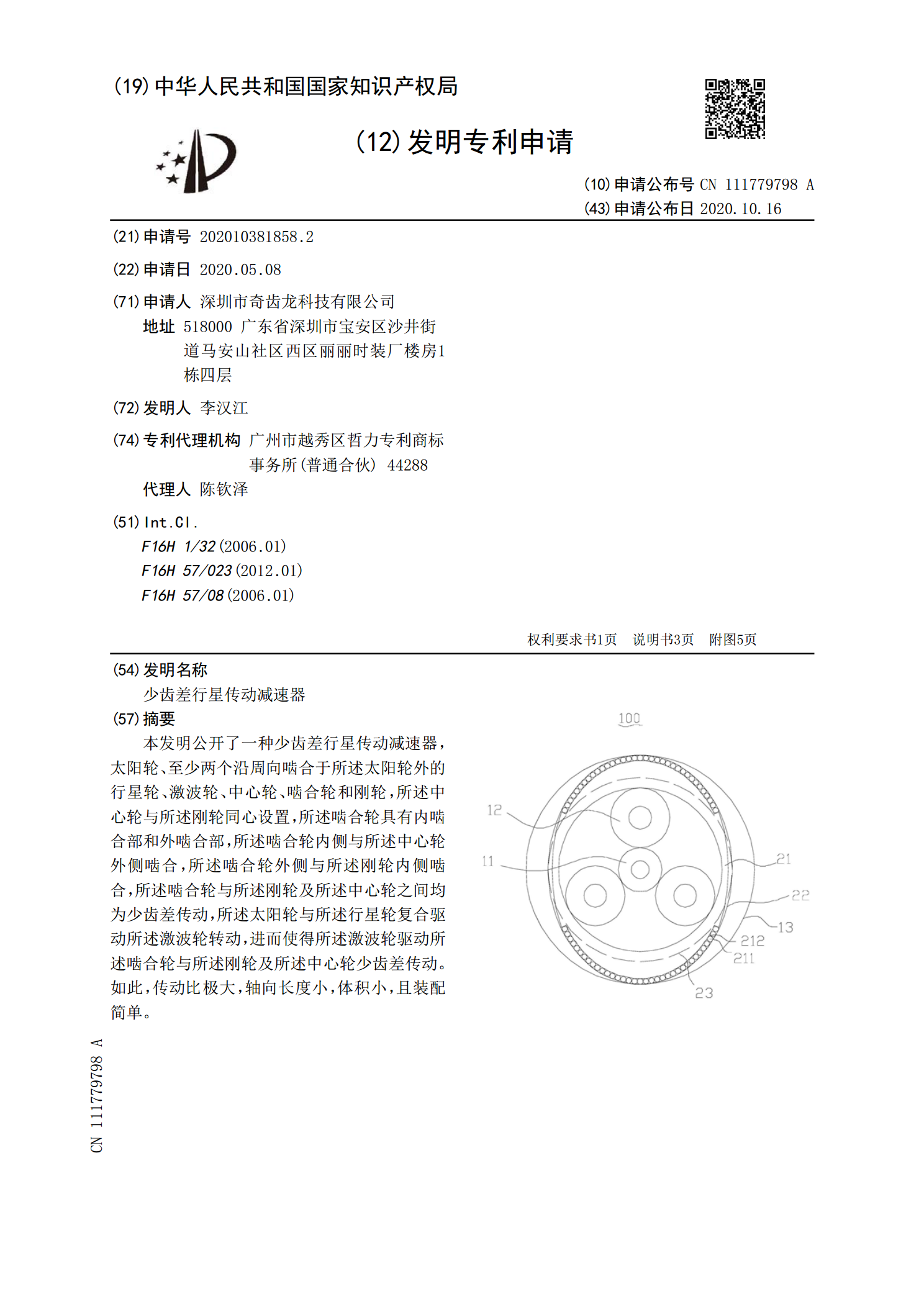
本发明公开了一种少齿差行星传动减速器,太阳轮、至少两个沿周向啮合于所述太阳轮外的行星轮、激波轮、中心轮、啮合轮和刚轮,所述中心轮与所述刚轮同心设置,所述啮合轮具有内啮合部和外啮合部,所述啮合轮内侧与所述中心轮外侧啮合,所述啮合轮外侧与所述刚轮内侧啮合,所述啮合轮与所述刚轮及所述中心轮之间均为少齿差传动,所述太阳轮与所述行星轮复合驱动所述激波轮转动,进而使得所述激波轮驱动所述啮合轮与所述刚轮及所述中心轮少齿差传动。如此,传动比极大,轴向长度小,体积小,且装配简单。

制动式少齿差行星减速器.pdf
本发明涉及机械减速技术领域,一种制动式少齿差行星减速器。其特征在于:(A)制动件由钢球V型槽机构、摩擦副及弹簧组成,摩擦副由圆锥体与锥盘组成,锥盘与从动盘内花键与轴外花键滑配,弹簧一端靠紧轴的轴肩上,另一端靠紧锥盘端面上使圆锥摩擦面压紧;(B)少齿差传动件由偏心轴承、相位角错开180°二齿轮、内齿圈、柱销与柱套、输出轴及二支承轴承组成,内齿圈联接在输出轴圆盘上,柱销一端紧配在机架均布孔中,另一端上装有一只均载环。有益效果:(1)传动平稳、接触应力小承载力大;(2)制动时无火花,使用可靠;(3)轮齿啮合副润