
双变形履带行走部及具有其的机器人移动平台.pdf

春岚****23

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双变形履带行走部及具有其的机器人移动平台.pdf
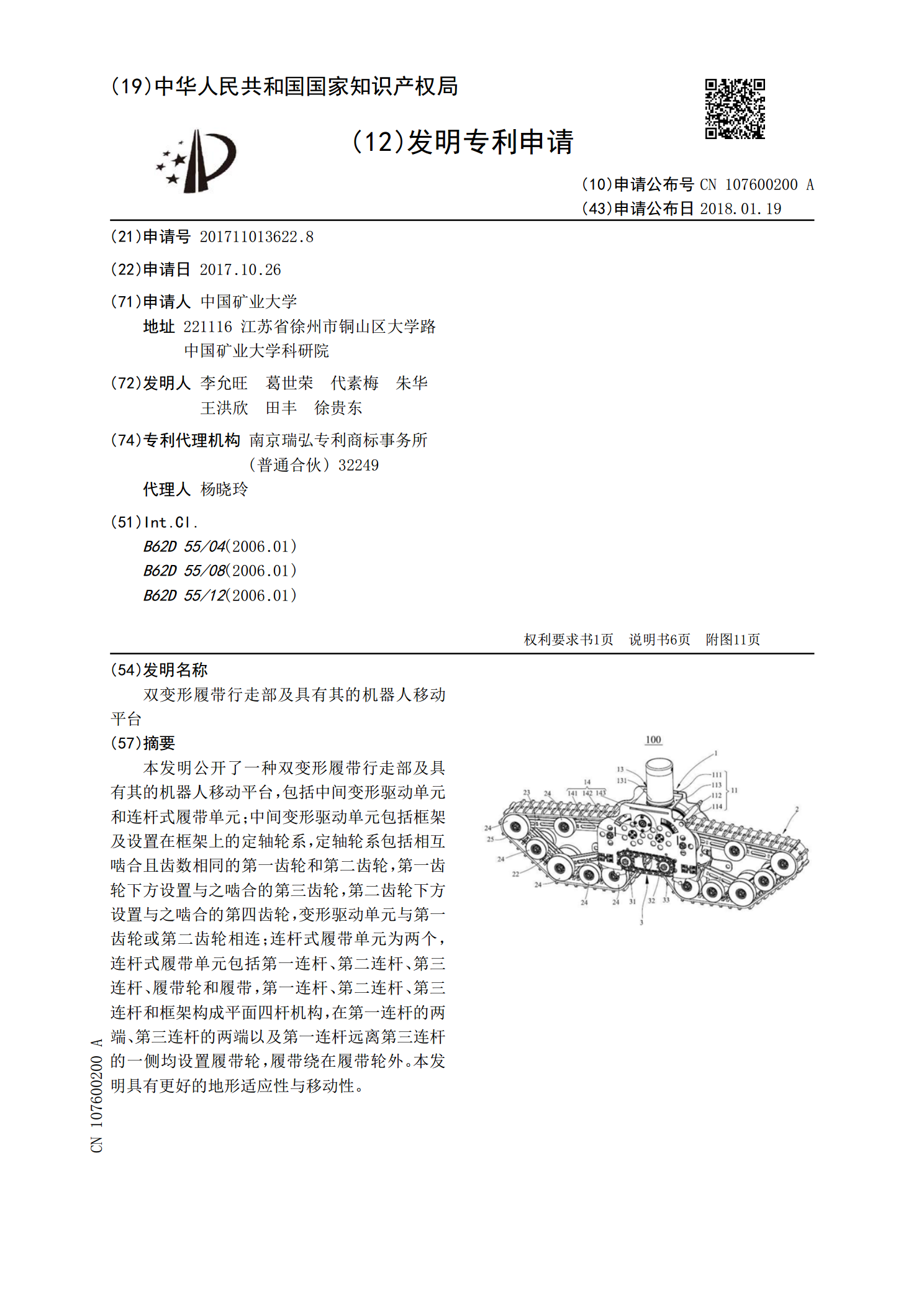
本发明公开了一种双变形履带行走部及具有其的机器人移动平台,包括中间变形驱动单元和连杆式履带单元;中间变形驱动单元包括框架及设置在框架上的定轴轮系,定轴轮系包括相互啮合且齿数相同的第一齿轮和第二齿轮,第一齿轮下方设置与之啮合的第三齿轮,第二齿轮下方设置与之啮合的第四齿轮,变形驱动单元与第一齿轮或第二齿轮相连;连杆式履带单元为两个,连杆式履带单元包括第一连杆、第二连杆、第三连杆、履带轮和履带,第一连杆、第二连杆、第三连杆和框架构成平面四杆机构,在第一连杆的两端、第三连杆的两端以及第一连杆远离第三连杆的一侧均设

变形履带悬架及具有其的机器人移动平台.pdf
本发明公开了一种变形履带悬架,其包括中间联接架、变形履带单元、变形驱动组件;所述变形履带单元为两个,均与所述中间联接架相连,且呈对称布置;所述变形履带单元的变形履带架为六杆机构,包括一个四杆运动链,履带轮不少于四个,所述履带轮包括驱动轮和改向轮,所述履带轮与四杆运动链的转动副及其杆件相连,履带包络于所述履带轮外;履带驱动组件驱动驱动轮并带动履带转动;所述变形驱动组件与所述变形履带单元的变形履带架相连并驱动变形履带架变形,并能始终保持履带底部水平。本发明还提出一种具有变形履带悬架的机器人移动平台,因为使用了
双蜗轮机构变形行走部及具有其的消防移动平台.pdf
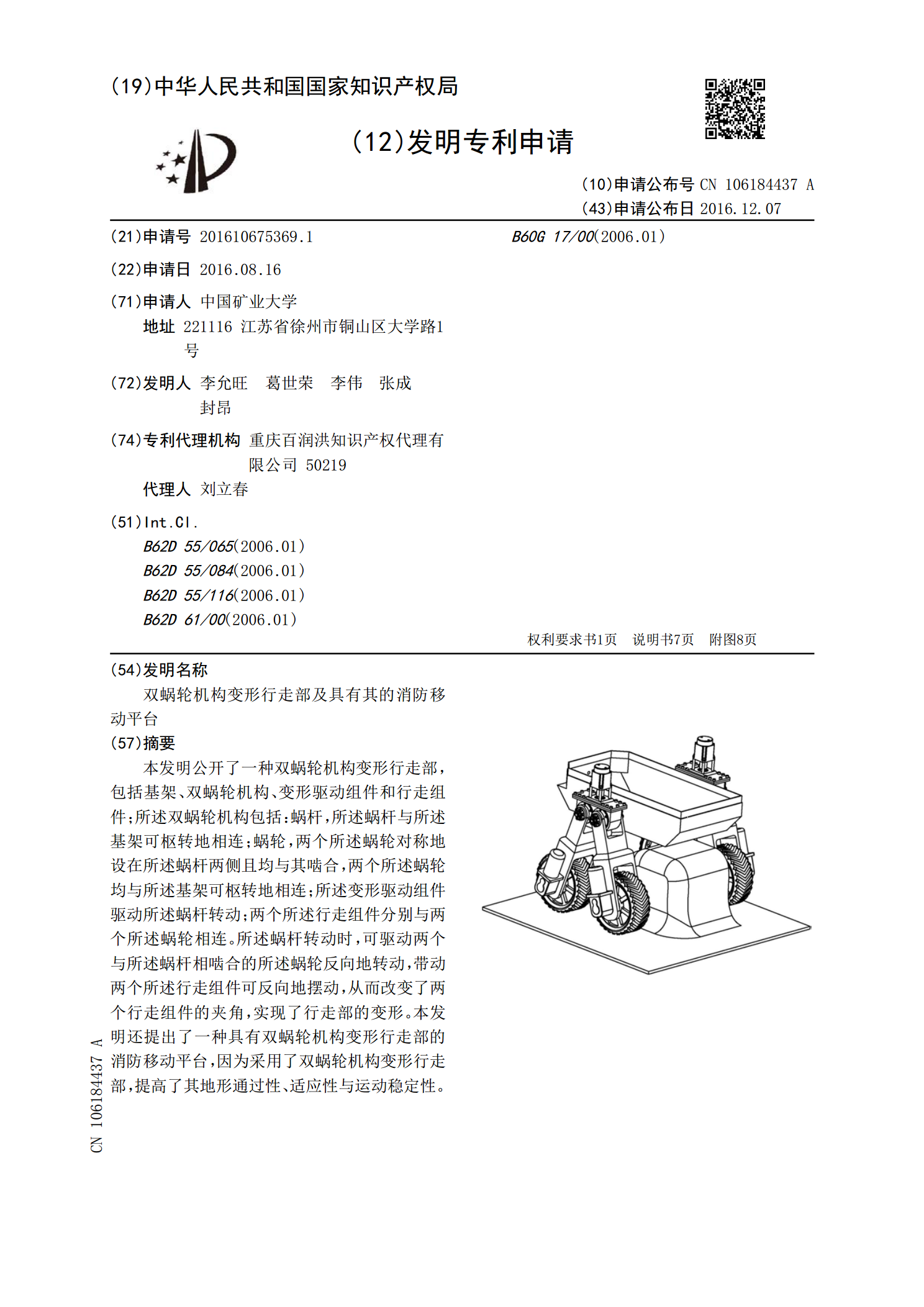
本发明公开了一种双蜗轮机构变形行走部,包括基架、双蜗轮机构、变形驱动组件和行走组件;所述双蜗轮机构包括:蜗杆,所述蜗杆与所述基架可枢转地相连;蜗轮,两个所述蜗轮对称地设在所述蜗杆两侧且均与其啮合,两个所述蜗轮均与所述基架可枢转地相连;所述变形驱动组件驱动所述蜗杆转动;两个所述行走组件分别与两个所述蜗轮相连。所述蜗杆转动时,可驱动两个与所述蜗杆相啮合的所述蜗轮反向地转动,带动两个所述行走组件可反向地摆动,从而改变了两个行走组件的夹角,实现了行走部的变形。本发明还提出了一种具有双蜗轮机构变形行走部的消防移动平
双蜗轮机构变形减震行走部及具有其的消防移动平台.pdf
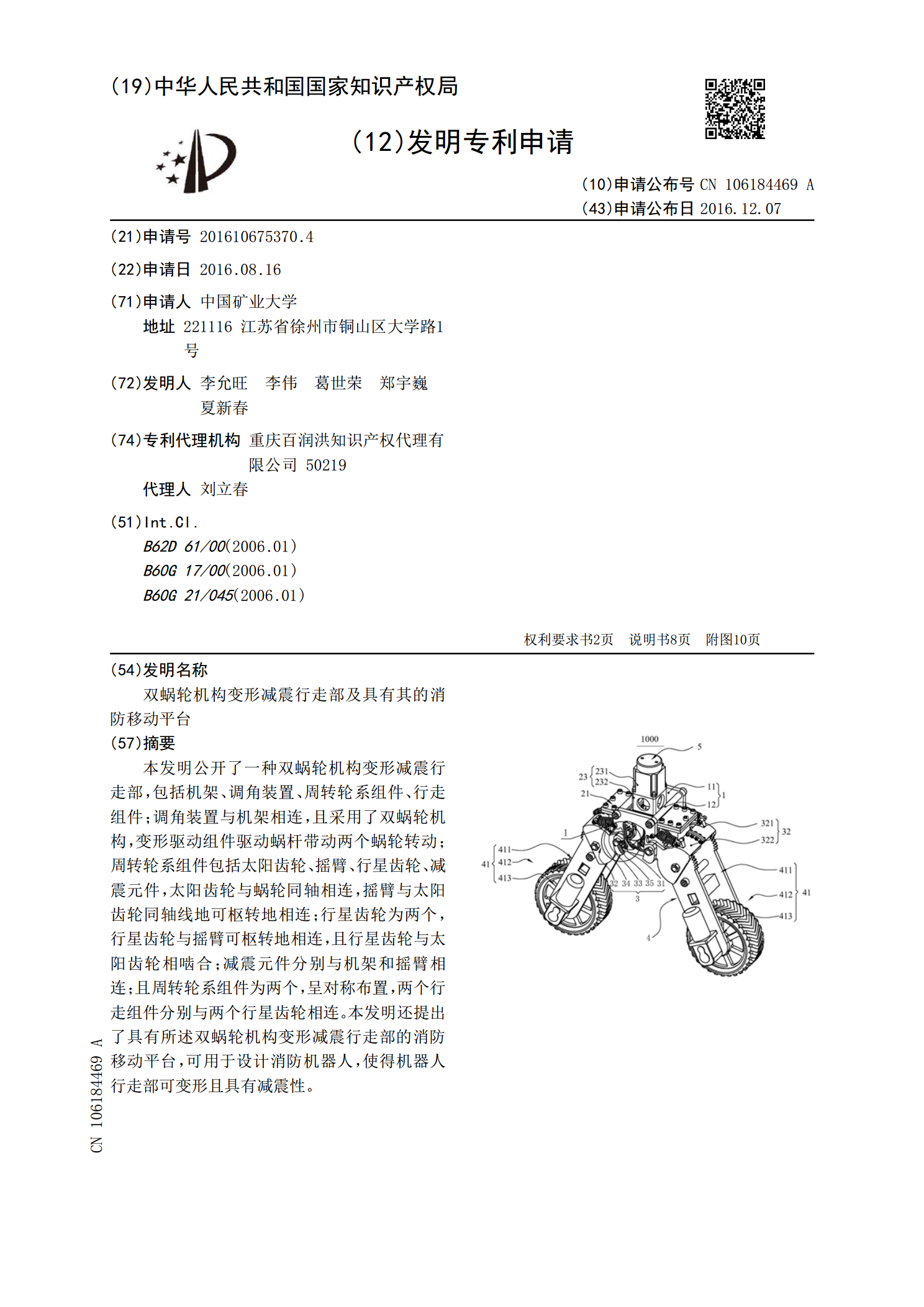
本发明公开了一种双蜗轮机构变形减震行走部,包括机架、调角装置、周转轮系组件、行走组件;调角装置与机架相连,且采用了双蜗轮机构,变形驱动组件驱动蜗杆带动两个蜗轮转动;周转轮系组件包括太阳齿轮、摇臂、行星齿轮、减震元件,太阳齿轮与蜗轮同轴相连,摇臂与太阳齿轮同轴线地可枢转地相连;行星齿轮为两个,行星齿轮与摇臂可枢转地相连,且行星齿轮与太阳齿轮相啮合;减震元件分别与机架和摇臂相连;且周转轮系组件为两个,呈对称布置,两个行走组件分别与两个行星齿轮相连。本发明还提出了具有所述双蜗轮机构变形减震行走部的消防移动平台,
丝杠驱动变形的减震行走部及具有其的消防移动平台.pdf
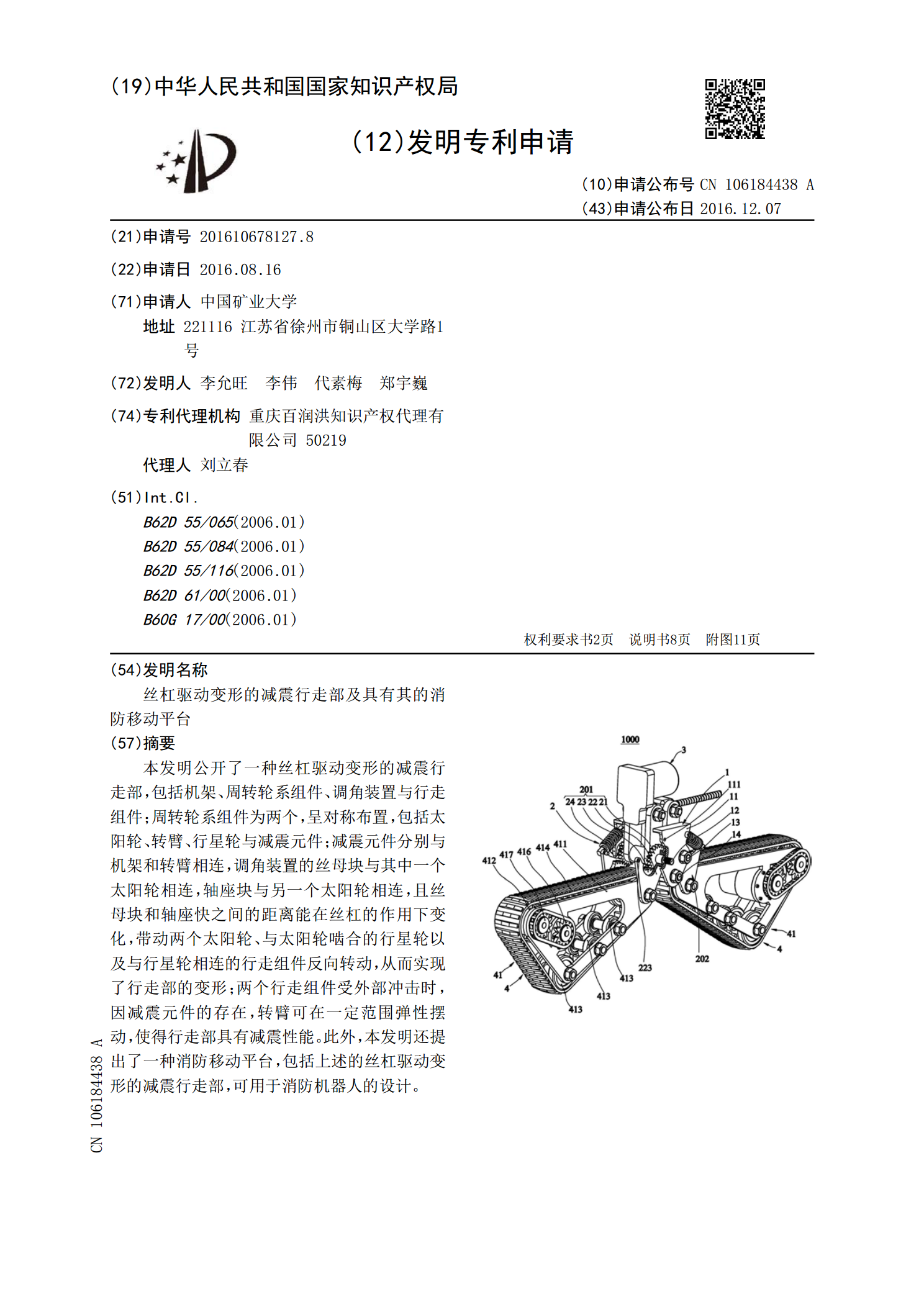
本发明公开了一种丝杠驱动变形的减震行走部,包括机架、周转轮系组件、调角装置与行走组件;周转轮系组件为两个,呈对称布置,包括太阳轮、转臂、行星轮与减震元件;减震元件分别与机架和转臂相连,调角装置的丝母块与其中一个太阳轮相连,轴座块与另一个太阳轮相连,且丝母块和轴座快之间的距离能在丝杠的作用下变化,带动两个太阳轮、与太阳轮啮合的行星轮以及与行星轮相连的行走组件反向转动,从而实现了行走部的变形;两个行走组件受外部冲击时,因减震元件的存在,转臂可在一定范围弹性摆动,使得行走部具有减震性能。此外,本发明还提出了一种