
车辆用驾驶支援装置.pdf

篷璐****爱吗

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共47页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆用驾驶支援装置.pdf
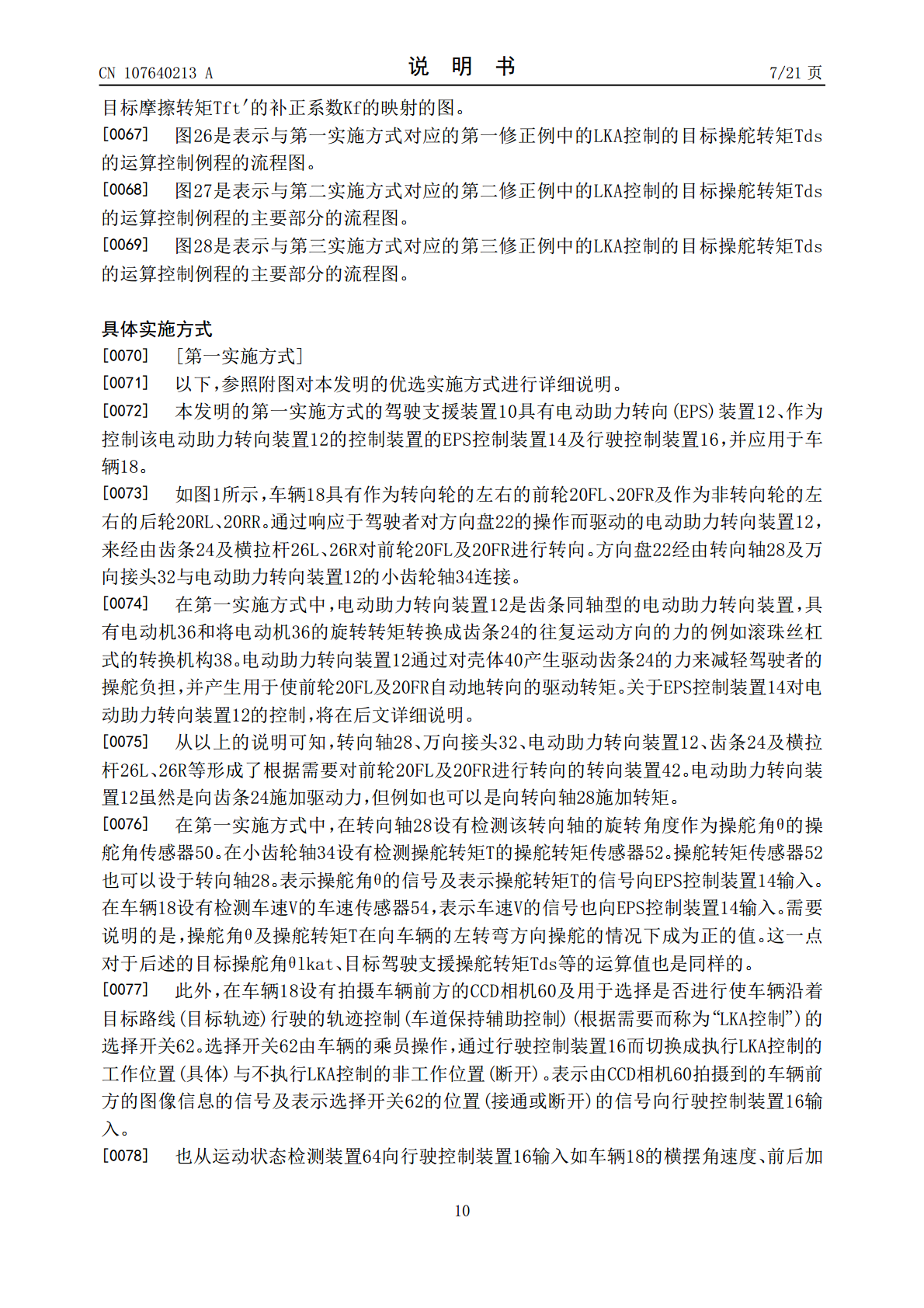
本发明提供车辆用驾驶支援装置。驾驶支援装置(10)具有对转向轮(20FL、20FR)进行转向的转向装置(42)和构成为进行通过转向装置的控制而使转向轮的转向角变化的行驶控制的控制装置(14、16),其中,控制装置运算车辆的目标的行驶状态的指标值与实际的行驶状态的指标值

车辆驾驶支援装置.pdf
本发明提供能够使驾驶员在操作从动车轮时或在折返时,分别对作为参考的路面的状态进行掌握的车辆驾驶支援装置。这样的车辆驾驶支援装置,具有:车轮位置存储部,其存储车辆行驶过的车轮位置;路面信息获取部,其获取路面信息,所述路面信息对车辆行驶过的路面的状态进行表示;显示图像生成部,其生成显示图像,所述显示图像是将和存储的车轮的位置相关的路面信息在车辆具有的显示装置上显示的图像。

车辆驾驶支援装置.pdf
能够进行考虑了悬架机构的当前的工况的车辆支援的车辆驾驶支援装置包括:车辆工况运算模块,其运算用于悬架车轮的悬架机构上的每个车轮的当前的工况值;驾驶支援图像生成部,其生成驾驶支援图像,该驾驶支援图像是指,将对所得到的每个车轮的所述工况值进行图像化而成的工况图像配置在车辆图像的相对应的位置上而得到的图像;显示器,其显示驾驶支援图像。

车辆的驾驶支援装置.pdf
提供一种车辆的驾驶支援装置,在转弯辅助控制的执行后当车辆制动所伴随的车辆减速时,能够抑制赋予左右驱动轮的制动力变得不平衡。该装置具有:推测部,其分别推测左右驱动轮的制动部分的温度;第一执行部,其执行分别控制赋予各车轮的制动力的车辆稳定化控制;以及第二执行部,其在车辆稳定化控制的非执行时的车辆的转弯时执行赋予左右驱动轮中的内侧驱动轮(图6(d))制动力的转弯辅助控制。在转弯辅助控制的执行中,使在左右驱动轮的刹车片温度之差(图6(a))在减少判定值J1以上时赋予内侧驱动轮的制动力(在时刻t12以后以实线示出)
车辆驾驶支援系统及车辆驾驶支援方法.pdf
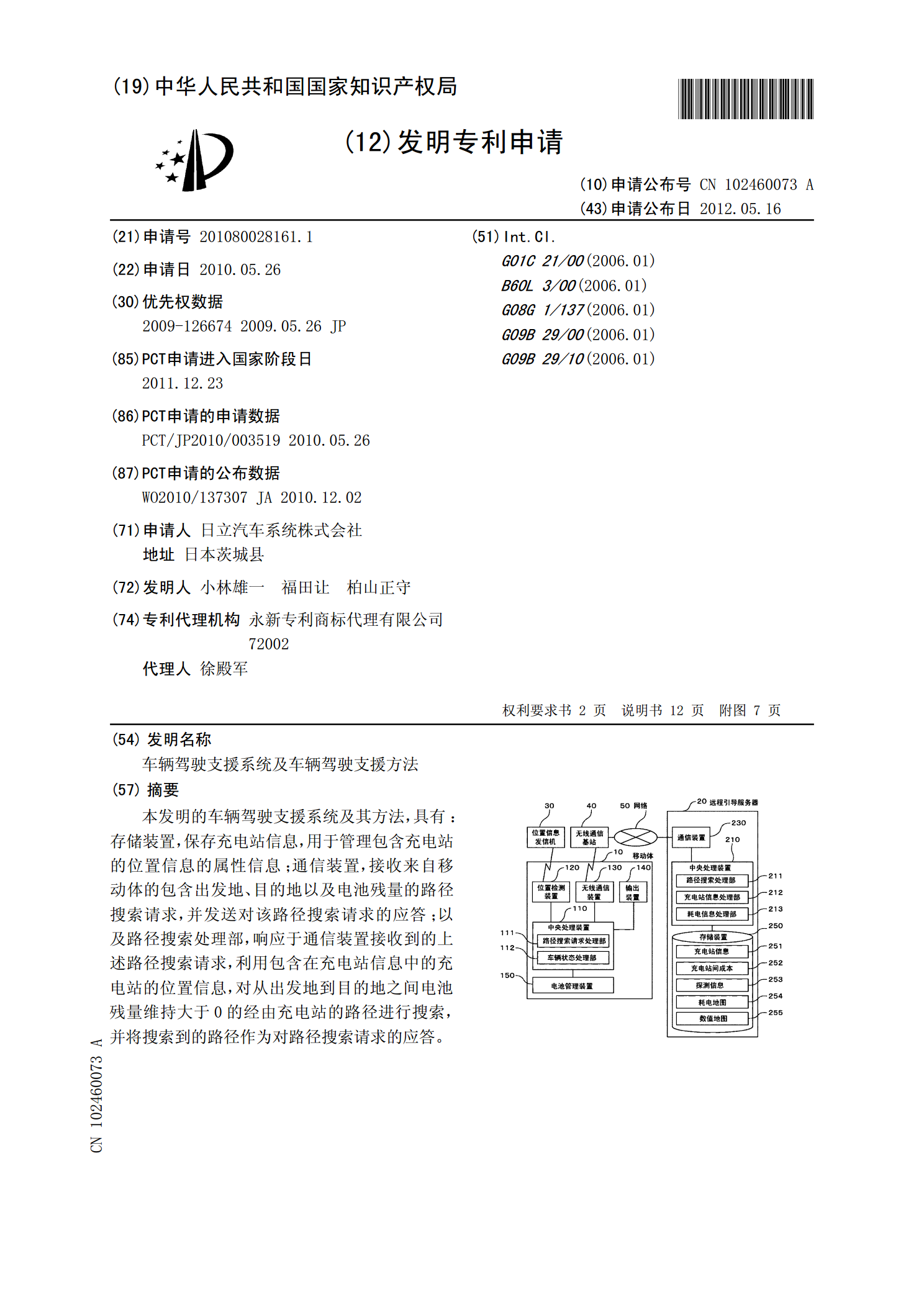
本发明的车辆驾驶支援系统及其方法,具有:存储装置,保存充电站信息,用于管理包含充电站的位置信息的属性信息;通信装置,接收来自移动体的包含出发地、目的地以及电池残量的路径搜索请求,并发送对该路径搜索请求的应答;以及路径搜索处理部,响应于通信装置接收到的上述路径搜索请求,利用包含在充电站信息中的充电站的位置信息,对从出发地到目的地之间电池残量维持大于0的经由充电站的路径进行搜索,并将搜索到的路径作为对路径搜索请求的应答。