
一种新型履带式行走机构.pdf

小长****6淑


1/8
2/8

3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型履带式行走机构.pdf
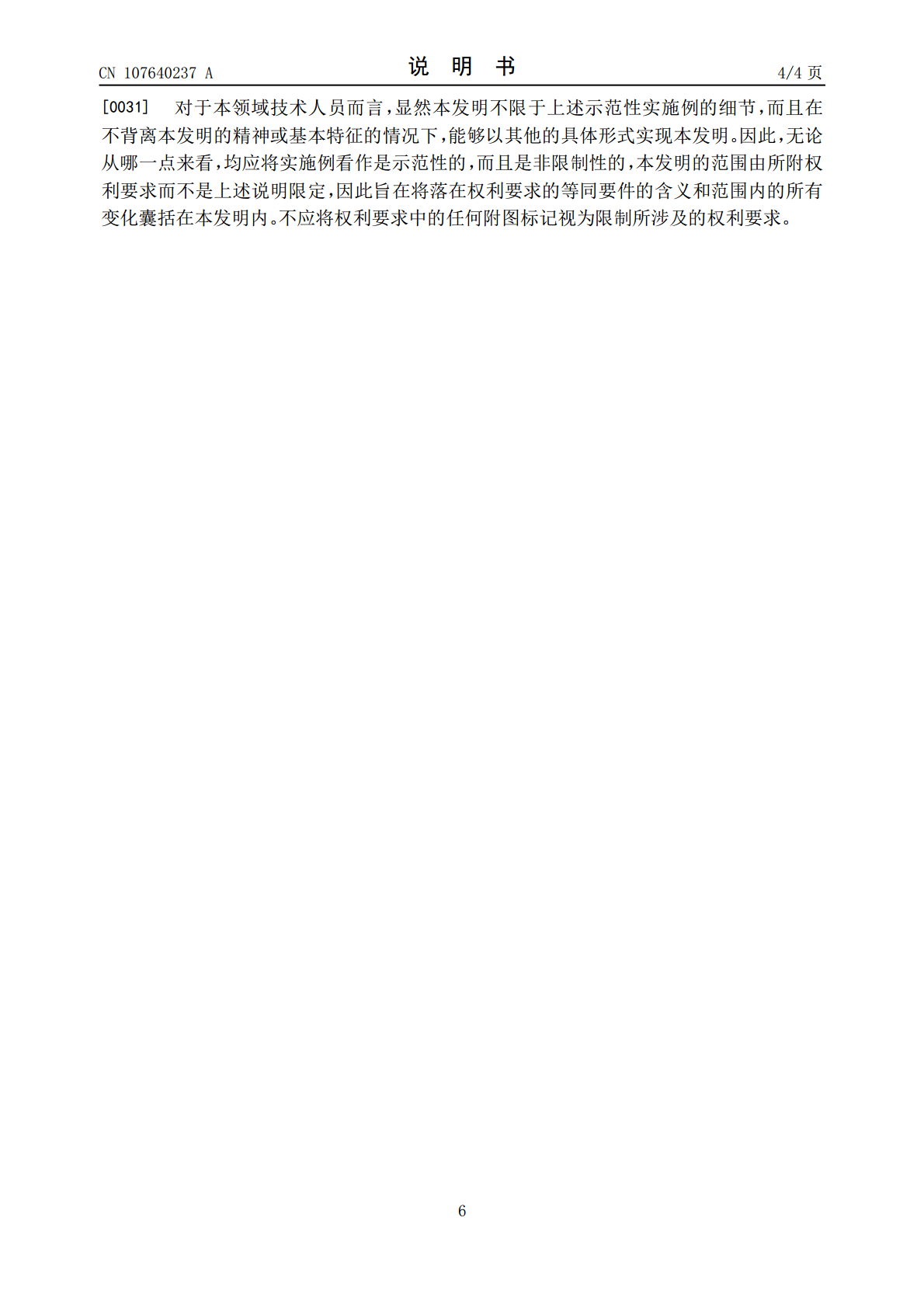
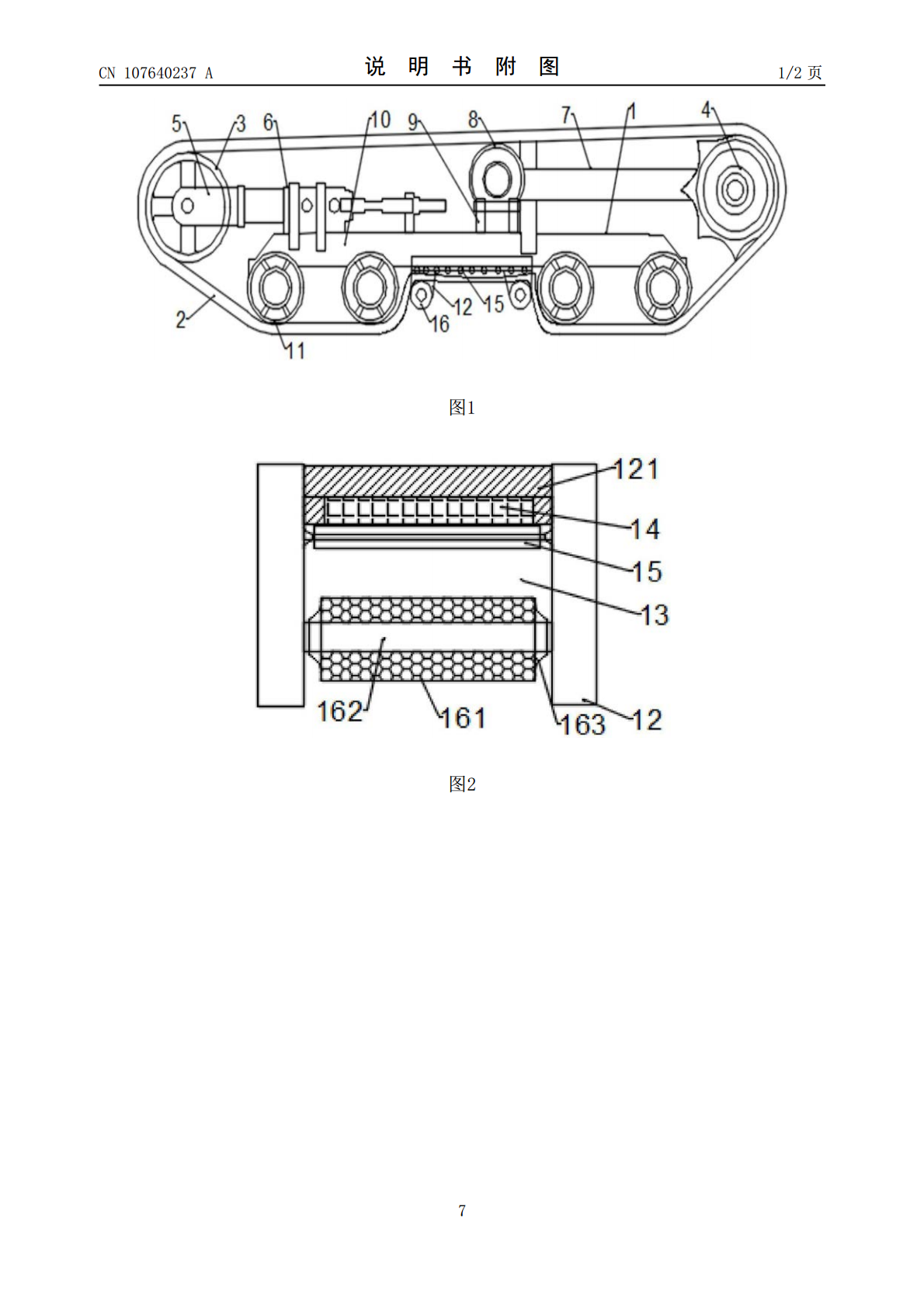
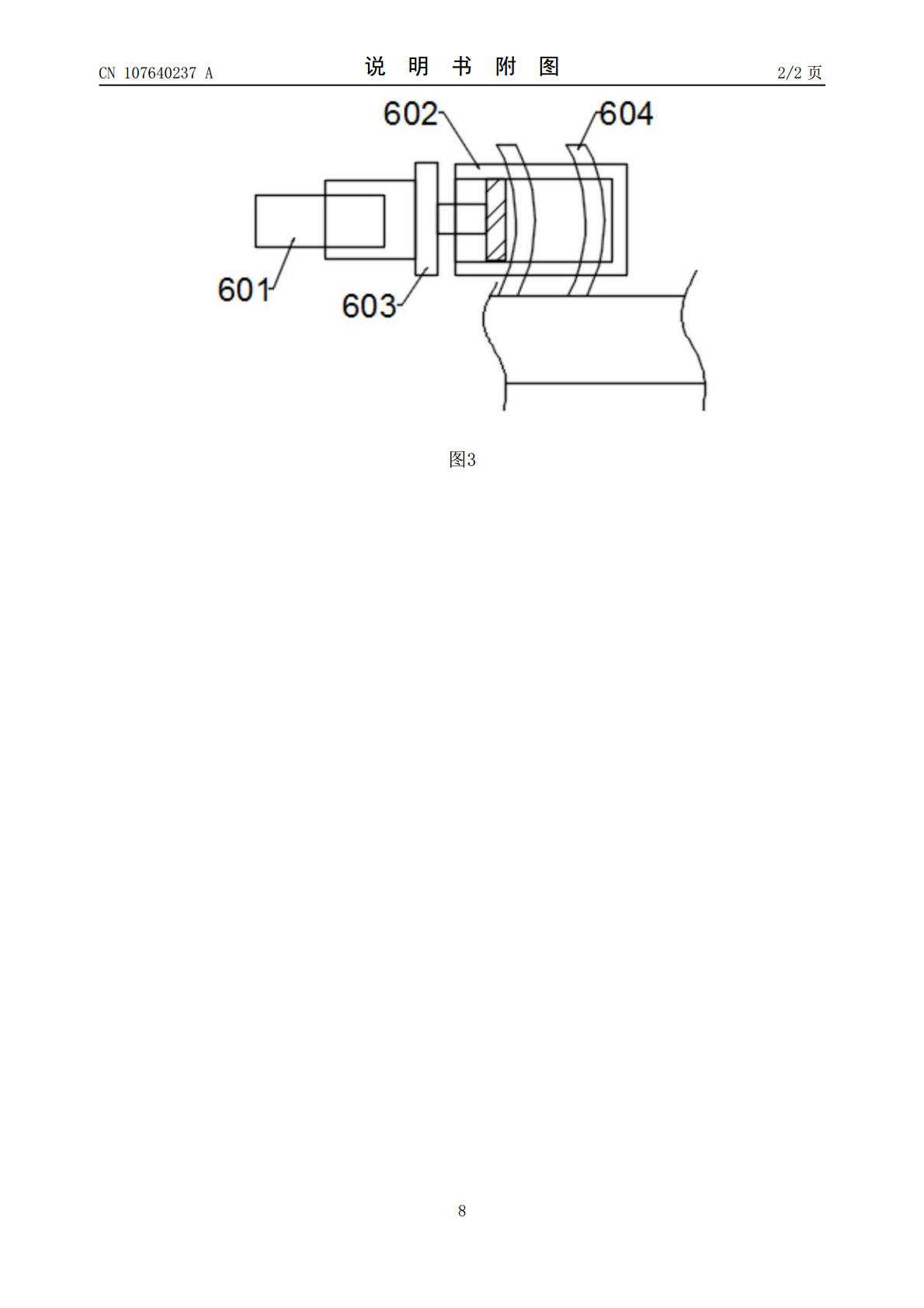
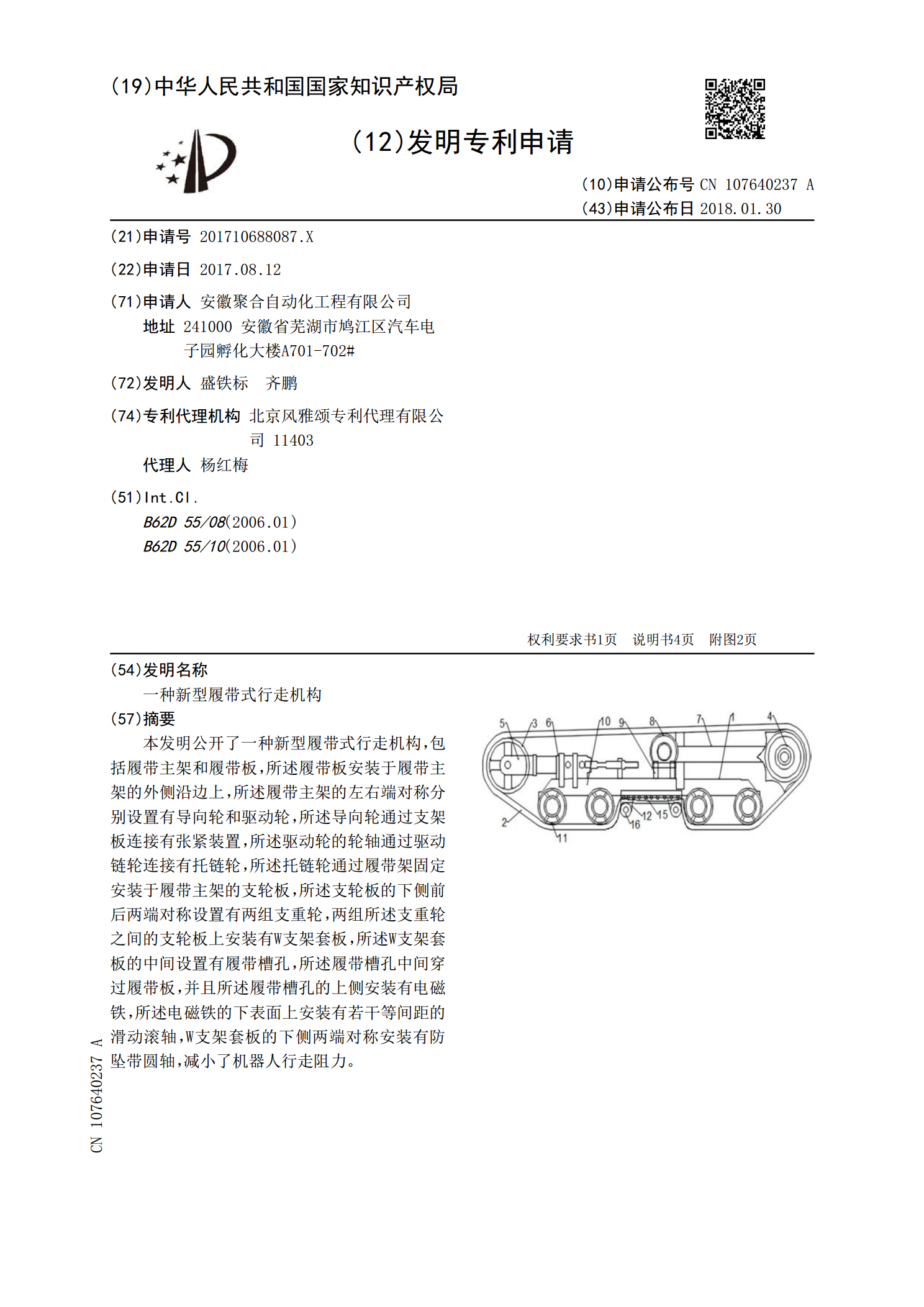
本发明公开了一种新型履带式行走机构,包括履带主架和履带板,所述履带板安装于履带主架的外侧沿边上,所述履带主架的左右端对称分别设置有导向轮和驱动轮,所述导向轮通过支架板连接有张紧装置,所述驱动轮的轮轴通过驱动链轮连接有托链轮,所述托链轮通过履带架固定安装于履带主架的支轮板,所述支轮板的下侧前后两端对称设置有两组支重轮,两组所述支重轮之间的支轮板上安装有W支架套板,所述W支架套板的中间设置有履带槽孔,所述履带槽孔中间穿过履带板,并且所述履带槽孔的上侧安装有电磁铁,所述电磁铁的下表面上安装有若干等间距的滑动滚轴

一种防倒退履带式行走机构.pdf
本发明公开了一种防倒退履带式行走机构,包括履带、防倒退组件和底座,底座包括两相互平行的底座侧板,底座侧板上分别设置有履带;履带包括主动轮、负重轮和围绕其的柔性链环,两个主动轮通过第一转轴连接并同轴转动;防倒退组件包括棘轮和棘爪,棘轮套设在第一转轴上并可转动地连接在其中一底座侧板上,底座侧板上还设置有与棘轮配合的棘爪。本发明便于结构简单、运行平稳,在运行过程中可防止机构倒退。

一种履带式行走机构支撑结构.pdf
本发明公开了一种履带式行走机构支撑结构,包括两组架板、两组驱动轮、若干托轮以及支撑板,单个驱动轮和托轮均活动安装在架板一侧,驱动轮一侧位于两组架板之间的位置处均配套安装有驱动电机,本发明通过设置支重结构,在不平整的路面行驶时,支重轮可发生一定角度的偏转,此时第二弹性件发生弹性形变,使得履带发生凹陷现象,进一步保证履带行走的稳定;通过设置第一弹性件,与支撑座和支杆形成三角结构,保证整个支撑板的稳定,该处的履带为弹性橡胶材质,在支撑板上表面物体增重的情况下,使得履带发生一定角度的偏移,增大与地面的接触面积,从

履带式行走机构.pdf
本发明涉及尤其用于运行重量大于200吨的挖掘机的履带式行走机构,该行走机构具有驱动轮(3)、导向轮(2)、多个履带轮(4)、多个托带轮(5)以及环链,该环链由多个以铰接方式互连的履带板(7)形成,其中,驱动轮(3)具有沿侧向伸出的齿廓(13’),履带板(7)具有垂直伸出的、彼此平行地延伸的齿(13),所述齿在履带板(7)围绕驱动轮(3)转向时接合到所述齿廓(13’)中,其中,所述履带板(7)在所述齿(13)之间为履带轮(4)和托带轮(5)一方和为导向轮(2)以及驱动轮(3)一方形成分开的运行表面(10,1
一种新型行走机构.pdf
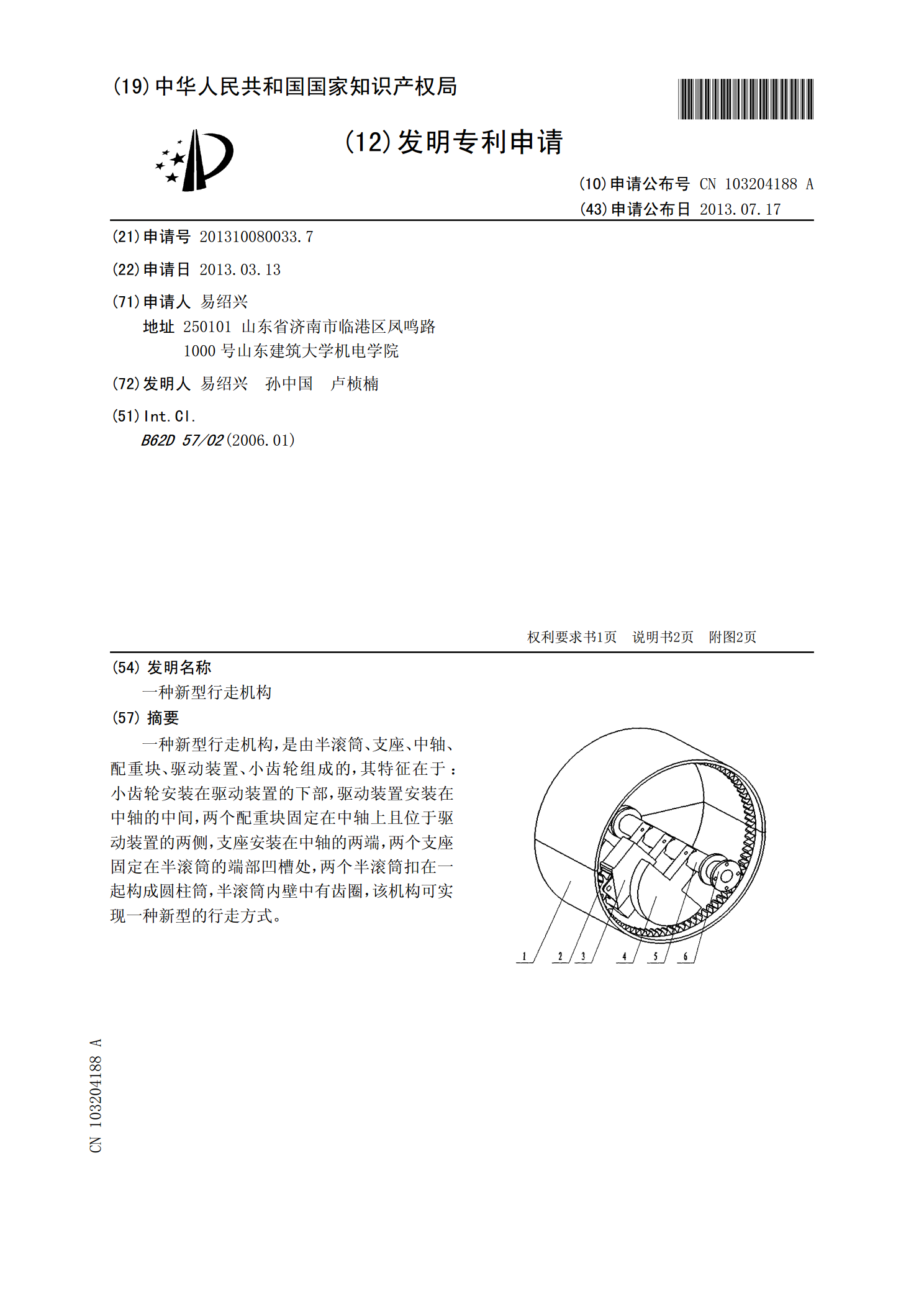
一种新型行走机构,是由半滚筒、支座、中轴、配重块、驱动装置、小齿轮组成的,其特征在于:小齿轮安装在驱动装置的下部,驱动装置安装在中轴的中间,两个配重块固定在中轴上且位于驱动装置的两侧,支座安装在中轴的两端,两个支座固定在半滚筒的端部凹槽处,两个半滚筒扣在一起构成圆柱筒,半滚筒内壁中有齿圈,该机构可实现一种新型的行走方式。